







 本文详细介绍了Nand Flash中的ONFI标准,包括Raw Nand分类、内存模型、信号与封装、接口命令等。此外,还探讨了Linux的MTD子系统,讲解了其架构、核心结构体、Nand Flash和Nor Flash的驱动层,并分析了MTD设备的注册过程。通过对Nand Chip结构体和相关命令的解析,揭示了Linux如何抽象出通用接口以简化驱动编写。
本文详细介绍了Nand Flash中的ONFI标准,包括Raw Nand分类、内存模型、信号与封装、接口命令等。此外,还探讨了Linux的MTD子系统,讲解了其架构、核心结构体、Nand Flash和Nor Flash的驱动层,并分析了MTD设备的注册过程。通过对Nand Chip结构体和相关命令的解析,揭示了Linux如何抽象出通用接口以简化驱动编写。
----------------------------------------------------------------------------------------------------------------------------
内核版本:linux 5.2.8根文件系统:busybox 1.25.0u-boot:2016.05----------------------------------------------------------------------------------------------------------------------------
一、ONFI标准
Nand Flash是嵌入式世界里常见的存储器,对于嵌入式开发而言,Nand Flash主要分为两大类:Serial Nand、Raw Nand,这两类Nand的差异是很大的。
Raw Nand是相对于Serial Nand而言的,Serial Nand即串行接口的Nand Flash,比如采用SPI通信协议的Nand Flash,而Raw Nand是并行接口的Nand Flash。
这里我们首先介绍ONFI协议,主要是因为在Nand Flash驱动源码分析的时候涉及到ONFI协议。而我们使用的K9F2G08U0C这款芯片并没有支持ONFI协议,我们将该芯片支持的命令和ONFI 1.0规定的命令对比就可以发现。
1.1 ONFI标准
说到Raw Nand发展史,其实早期的Raw Nand没有统一标准,虽然早在1989年Toshiba便发表了Nand Flash结构,但具体到Raw Nand芯片,各厂商都是自由设计,因此尺寸不统一、存储结构差异大、接口命令不通用等问题导致客户使用起来很难受。
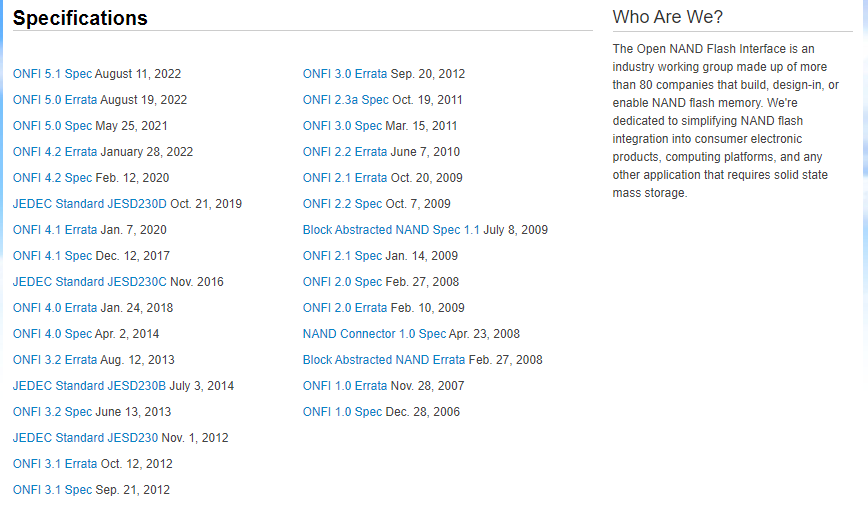
为了改变这一现状,2006年几个主流的Raw Nand厂商(Hynix、Intel、Micron、Phison、Sony、ST)联合起来商量制订一个Raw Nand标准,这个标准叫Open Nand Flash Interface,简称ONFI,2006年12月ONFI 1.0标准正式推出,此后几乎所有的Raw Nand厂商都按照ONFI标准设计生产Raw Nand,从此不管哪家生产的Raw Nand对嵌入式设计者来说几乎都是一样的,至少在驱动代码层面是一样的。
ONFI官网:http://www.onfi.org/,在这里我们下载到ONFI协议规范:
1.2 Raw Nand分类
1.2.1 单元层数
Nand Flash内存单元按照层数可以分为:
- 单层单元(Single Level Cell,简称SLC):这种类型的闪存在读写数据时具有最为精确,并且还具有持续最长的数据读写寿命的优点。SLC擦写寿命约在9万到10万次之间。这种类型的闪存由于其使用寿命,准确性和综合性能,在企业市场上十分受众。但由于储存成本高、存储容量相对较小,在家用市场则不太受青睐。
- 多层单元(Multi Level Cell,简称MLC):它的命名来源于它在SLC的1位/单元的基础上,变成了2位/单元。这样做的一大优势在于大大降低了大容量储存闪存的成本,约3000--10000次擦写寿命。
- 三层单元(Triple Level Cell,简称TLC):TLC闪存是闪存生产中最低廉的规格,其储存达到了3位/单元,虽然高储存密度实现了较廉价的大容量格式,但其读写的生命周期被极大地缩短,擦写寿命只有短短的500~1000次,同时读写速度较差,只适合普通消费者使用,不能达到工业使用的标准。
- 四层单元(Quad Lebel Cell,简称QLC):QLC每个单元可储存4bit数据,跟TLC相比,QLC的储存密度提高了33%。QLC不仅能经受1000次编程或擦写循环(与TLC相当,甚至更好),而且容量提升了,成本也更低。
结论:SLC>MLC>TLC。
目前大多数U盘都是采用TLC芯片颗粒,其优点是价格便宜,不过速度一般,寿命相对较短。
而SSD固态硬盘中,目前MLC颗粒固态硬盘是主流,其价格适中,速度与寿命相对较好,而低价SSD固态硬盘普遍采用的是TLC芯片颗粒,大家在购买固态硬盘的时候,可以在产品参数中去了解。
SLC颗粒固态目前主要在一些高端固态硬盘中出现,售价多数上千元,甚至更贵。
智能手机方面,目前多数智能手机存储也是采用TLC芯片存储,而苹果iPhone6部分产品采用的TLC芯片,另外还有部分采用的是MLC芯片颗粒。总的来说,MLC闪存芯片颗粒是时下主流,产品在速度、寿命以及价格上适中,比较适合推荐。
1.2.2 数据线宽度
数据线宽度可以分为x8 、x16。
1.2.3 数据采集模式
数据采集模式可以分为 SDR、DDR。
1.2.4 接口命令标准
接口命令标准可以分为:非标、ONFI。
1.3 Raw Nand内存模型
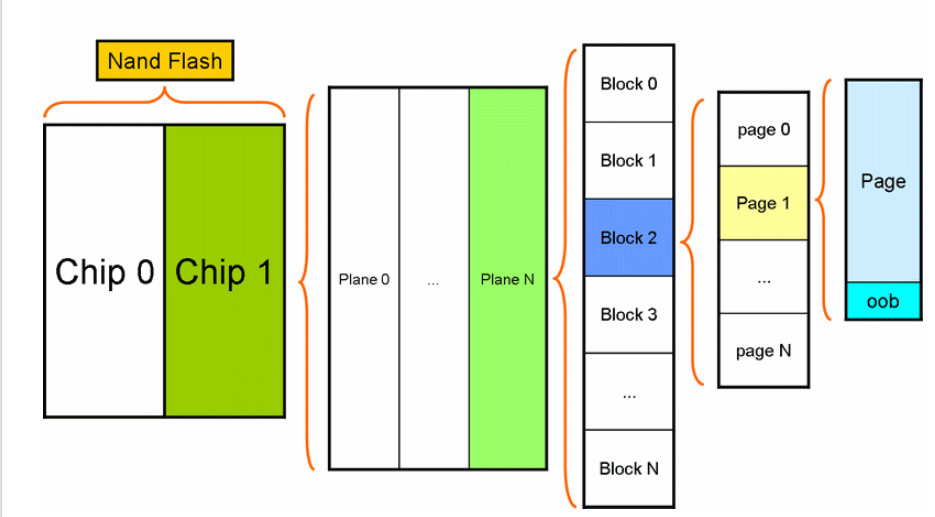
ONFI规定了Raw Nand内存单元从大到小最多分为:Device、LUN(Die、Target)、Plane、Block、Page、Cell。
- Device:就是指单片Nand Flash,对外提供Package封装的芯片,1个Device包含1个或者多个LUN;
- LUN(Die、Target):是接收和执行Flash命令的基本单元,1个LUN包含1个或者多个plane。
- Plane:1个Plane包含多个Block。
- Block:能够执行擦除操作的最小单元,通常由多个Page组成。
- Page:能够执行编程和读操作的最小单元,通常大小为2KB等。
- Cell:Page中的最小操作擦写读单元,对应一个浮栅晶体管,可以存储1bit或多bit。
其中Page和Block是必有的,因为Page是读写的最小单元,Block是擦除的最小单元。而LUN和Plane则不是必有的(如没有,可认为LUN=1, Plane=1),一般在大容量Raw Nand(至少8Gb以上)上才会出现。
常见的Nand Flash内部只有一个chip(LUN)、每个chip只有1个plane,而有些复杂得,容量更大的Nand Flash,内部有多个chip,每个chip有多个plane。这类的Nand Flash,其实就是多了一个主控将多块Flash叠加在一起,如下图:
注:对于chip的概念,我理解就是上面的LUN,其实任何型号的Nand Flash,都可以称其是一个chip;但是上面我们所提到的,是针对内部来说的,也就是某型号的Nand Flash,内部有几个chip,比如:
- 三星的2GB的K9WAG08U1A芯片(可以理解为外部芯片/型号)内部装了2个单片是1GB的K9K8G08U0A,此时就称K9WAG08U1A内部有2个chip;
- 而有些单个的chip,内部又包含多个plane,比如上面的K9K8G08U0A内部包含4个单片是2Gb的Plane;
1.4 Raw Nand信号与封装
ONFI规定了Raw Nand信号线与封装,如下是典型的x8 Raw Nand内部结构图:
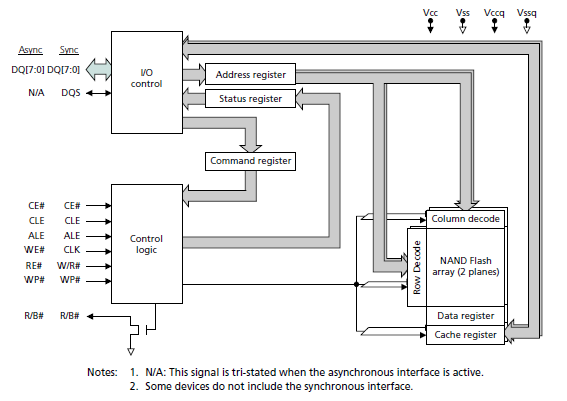
除了内存单元外,还有两大组成,分别是IO控制单元和逻辑控制单元,信号线主要挂在IO控制与逻辑单元,x8 Raw Nand主要有15根信号线(其中必须的是13根,$\overline{CE}$和$R\overline{B}$可以不用)。
| 引脚名称 | 描述 |
| CLE | 命令使能,当CLE为高电平时,$\overline{WE}$ 上升沿锁存I/O输入到命令寄存器 |
| ALE | 地址使能,当ALE为高电平时,$\overline{WE}$上升沿锁存I/O输入到地址寄存器 |
| $\overline{CE}$ | 片选信号,低电位有效 |
| $\overline{RE}$ | 读使能,低电位有效 |
| $\overline{WE}$ | $\overline{WE}$上升沿锁存I/O输入到命令、地址、数据寄存器 |
| $\overline{WP}$ | 写保护 |
| $R\overline{B}$ | 就绪/忙输出信号(低电平表示操作还在进行中,高电平表示操作完成) |
| VCC | 电源 |
| VSS | 地 |
| NC | 不接 |
| I/O0 ~ I/O7 | 数据输入输出(命令、地址、数据公用数据总线) |
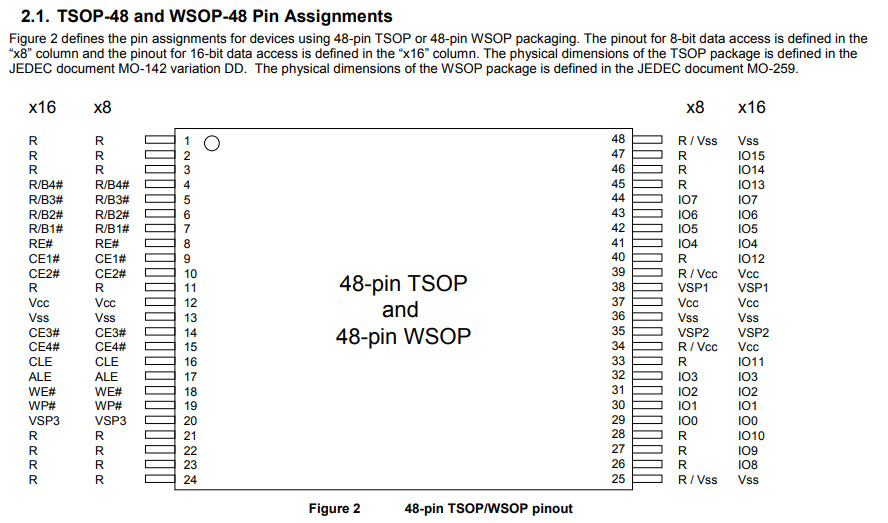
ONFI规定的封装标准有很多,比如TSOP48、LGA52、BGA63/100/132/152/272/316,其中对于嵌入式开发而言,最常用的是如下图扁平封装的TSOP-48,这种封装常用于容量较小的Raw Nand(1/2/4/8/16/32Gb),1-32Gb容量对于嵌入式设计而言差不多够用,且TSOP-48封装易于PCB设计,因此得以流行。
1.5 Raw Nand接口命令
ONFI 1.0规定了Raw Nand接口命令,如下表所示,其中一部分是必须要支持的(M),还有一部分是可选支持的(O)。必须支持的命令里最常用的是Read(Read Page)、Page Program、Block Erase、Read Status这三条,涵盖读写擦最基本的三种操作。
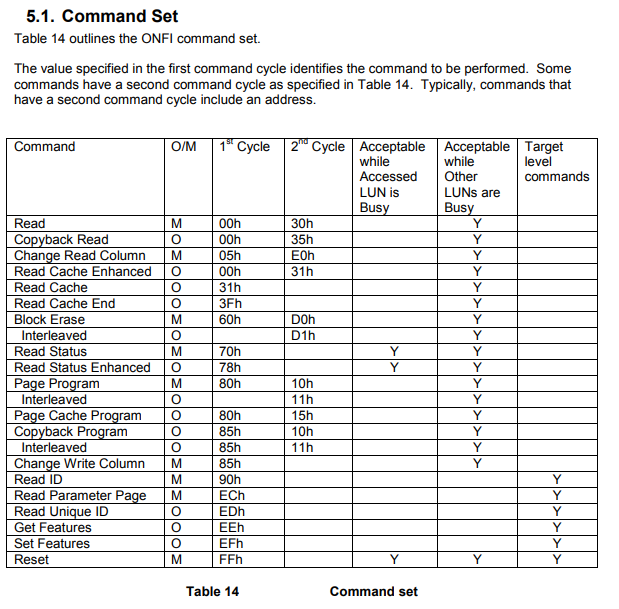
此外比较重要的还有:
- Read Status,用于获取命令执行状态与结果。
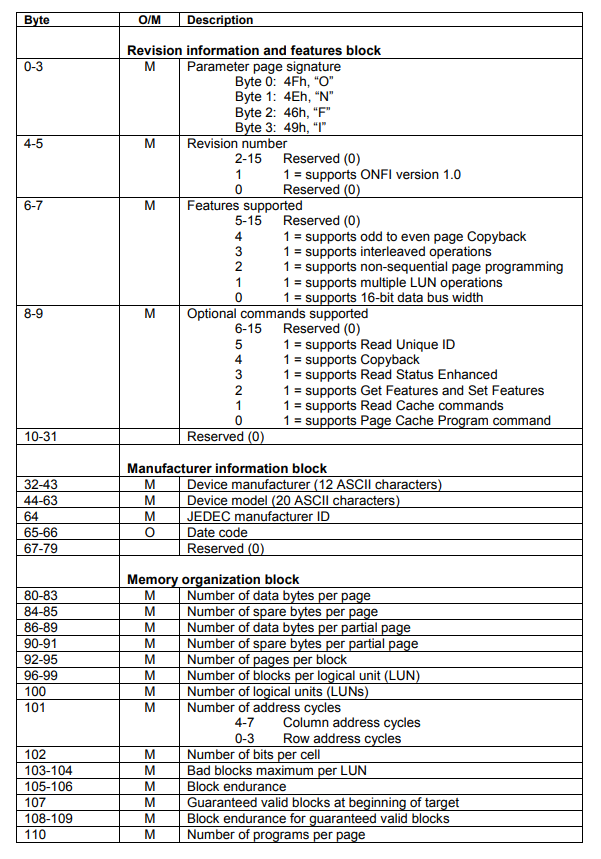
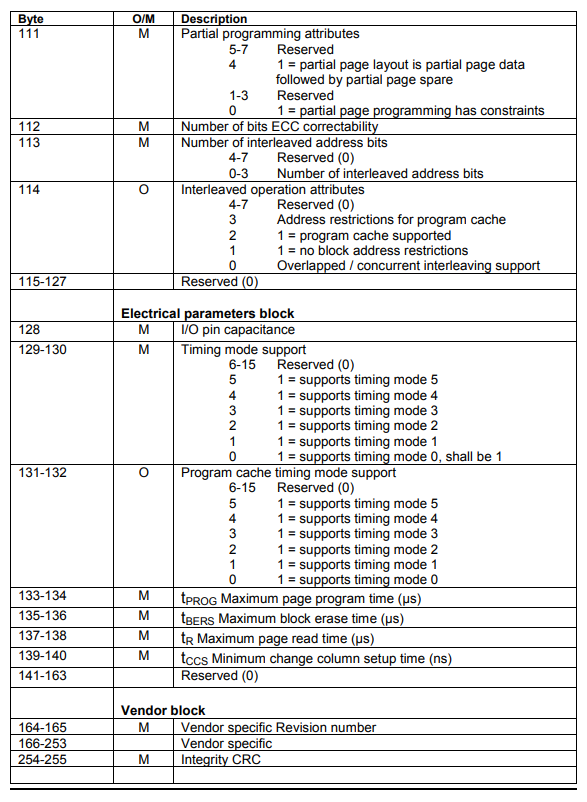
- Read Parameter Page:用于获取芯片内部存储的出厂信息(包括内存结构、特性、时序、其他行为参数等),其结构已由ONFI规定如下表,在设计Nand软件驱动时,可以通过获取这个Parameter Page来做到代码通用。
二、MTD设备驱动
MTD(Memory Technology Drivers)是用于访问memory设备( ROM 、 Flash)的Linux 的子系统, MTD 的主要目的是为了使新的memory设备的驱动更加简单,为此它在硬件和上层之间提供了一个抽象的接口。
2.1 MTD子系统概要
在介绍MTD之前,我们思考一个问题,linux内核为什么抽象出了MTD子系统呢?
我们回顾一下我们上一节块设备驱动编写的流程:
- 调用register_blkdev注册块设备主设备号;
- 使用alloc_disk申请一个通用磁盘对象gendisk;
- 使用blk_mq_init_sq_queue初始化一个请求队列;
- 设置gendisk结构体的成员;
- 设置成员参数major、first_minor、disk_name、fops;
- 设置成员参数queue,等于之前初始化的请求队列;
- 使用add_disk注册gendisk;
针对于每一种型号的Flash设备,我们进行块设备驱动编写的时候,都要重复进行如上的操作。那我们就开始想了,各种型号的Flash设备有什么区别呢?以Nand Flash为例,主要就是内存模型(页大小、块大小、页数/块、OOB等)、以及时序参数略有差别,那我们是否可以将与Nand Flash紧密相关的部分抽离出来,由Nand Flash驱动层提供,而其他相同部分单独抽离出来。MTD子系统就是做了这样的事情。
2.2 MTD子系统框架
如上图所示,MTD程序框架通用可以分为四层,从上到下以此为设备节点、MTD设备层、MTD原始设备层,Flash驱动层。
- 设备节点:通过mknod在/dev子目录下建立MTD块设备节点(主设备号为31)和MTD字符设备节点(主设备号为90),通过访问此设备节点即可访问MTD字符设备和块设备 。
- MTD设备层:基于MTD原始设备,linux系统可以定义出MTD的块设备(主设备号31)和字符设备(设备号90)。其中:
- mtdchar.c:MTD字符设备接口相关实现;
- mtdblock.c:MTD块设备接口相关实现;这部分负责设备的建立、数据的读写、优化处理等。这跟传统的块设备驱动一样,块设备主设备号的申请,gendisk结构体的分配设置、队列的初始化等,这些都是由内核自动完成。
- MTD原始设备层:用于描述MTD原始设备的数据结构是mtd_info,它定义了大量的关于MTD的数据和操作函数。其中:
- mtdcore.c: MTD原始设备接口相关实现;
- mtdpart.c : MTD分区接口相关实现;
- Flash驱动层:Flash驱动层负责对Flash硬件的读、写和擦除操作,Nand Flash和Nor Flash有不同的协议和硬件细节,这部分知道发什么,如发送什么命令可以识别、读写、擦除等操作,以及硬件该怎么发。Nand Flash有Nand的协议,Nor Flash有Nor的协议,不同协议有不同的函数,通过对应的结构体和函数构造对应的操作环境。用户只需要完成Flash驱动层的相关结构体的分配、设置、注册,并建立从具体设备到MTD原始设备映射关系。
-
- Nand Flash芯片的驱动位于drivers/mtd/nand/子目录下,Nand Flash使用nand_chip结构体;
- Nor Flash芯片驱动位于drivers/mtd/chips/子目录下,Nor Flash使用map_info结构体;
2.2.1 Flash驱动层
(1) Nor Flash驱动
linux内核实现了针对CFI、JEDEC等接口标准的通用Nor Flash驱动。在上述接口驱动基础上,芯片级驱动较简单 :定义具体内存映射结构体map_info,然后通过接口类型后调用do_map_probe。
以physmap.c(位于drivers/mtd/maps/)为例:
- 定义map_info结构体,初始化成员name、size、phys、bankwidth;
- 通过ioremap映射成员virt(虚拟内存地址);
- 通过函数simple_map_init初始化map_info成员函数read、write、copy_from、copy_to;
- 通过do_map_probe进行CFI接口探测,返回mtd_info结构体;
- 通过mtd_device_parse_register注册MTD原始设备;
(2) Nand Flash驱动
linux内核实现了通用Nand Flash驱动(drivers/mtd/nand/raw/nand_base.c),芯片级驱动需要实现nand_chip结构。
MTD使用nand_chip来表示一个Nand Flash芯片, 该结构体包含了关于Nand Flash的内存模型信息,读写方法,ECC模式,硬件控制等一系列底层机制。
以s3c2410.c(位于drivers/mtd/nand/raw)为例:
-
分配nand_chip内存;
-
根据SOC Nand控制器初始化nand_chip成员,比如:chip->legacy(成员write_buf、read_buf、select_chip、cmd_ctrl、dev_ready、IO_ADDR_R、IO_ADDR_W)、chip->controller;
- 设置chip->priv为mtd_info;
-
以mtd_info为参数调用nand_scan()探测Nand Flash,nand_scan()会读取nand芯片ID:
- 初始化chip->base.mtd(成员writesize、oobsize、erasesize等);
- 初始化chip->base.memorg(成员bits_per_cell、pagesize、oobsize、pages_per_eraseblock、planes_per_lun、luns_per_target、ntatgets等);
- 初始化chip->options、chip->base.eccreq;
- 初始化chip->ecc各个成员(设置ecc模式及处理函数);
- chip成员中所有未初始化函数指针则使用nand_base.c中的默认函数;
-
mtd_info和mtd_partition为参数调用mtd_device_register()进行MTD设备注册;
2.3 MTD核心结构体
2.3.1 struct mtd_info
linux内核使用mtd_info结构体表示MTD原始设备,描述一个设备或一个多分区设备中的一个分区,这其中定义了大量关于MTD的数据和操作函数;所有mtd_info结构体都被存放在mtd_info数组mtd_table中。
mtd_info定义在include/linux/mtd/mtd.h:
struct mtd_info {
u_char type; // MTD设备类型 包括MTD_NORFALSH、MTD_NANDFALSH等
uint32_t flags; // 标志 MTD_WRITEABLE、MTD_NO_ERASE等
uint32_t orig_flags; /* Flags as before running mtd checks */
uint64_t size; // Total size of the MTD MTD设备总容量
/* "Major" erase size for the device. Naïve users may take this
* to be the only erase size available, or may use the more detailed
* information below if they desire
*/
uint32_t erasesize; // MTD设备擦除单位大小,对于Nand Flash来说就是Block的大小
/* Minimal writable flash unit size. In case of NOR flash it is 1 (even
* though individual bits can be cleared), in case of NAND flash it is
* one NAND page (or half, or one-fourths of it), in case of ECC-ed NOR
* it is of ECC block size, etc. It is illegal to have writesize = 0.
* Any driver registering a struct mtd_info must ensure a writesize of
* 1 or larger.
*/
uint32_t writesize; // 可写入数据最小字节数,对于Nor Flash是字节,对于Nand Flash为一页
/*
* Size of the write buffer used by the MTD. MTD devices having a write
* buffer can write multiple writesize chunks at a time. E.g. while
* writing 4 * writesize bytes to a device with 2 * writesize bytes
* buffer the MTD driver can (but doesn't have to) do 2 writesize
* operations, but not 4. Currently, all NANDs have writebufsize
* equivalent to writesize (NAND page size). Some NOR flashes do have
* writebufsize greater than writesize.
uint32_t writebufsize;
uint32_t oobsize; // Amount of OOB data per block (e.g. 16)
uint32_t oobavail; // Available OOB bytes per block
/*
* If erasesize is a power of 2 then the shift is stored in
* erasesize_shift otherwise erasesize_shift is zero. Ditto writesize.
*/
unsigned int erasesize_shift; // 擦除数据偏移值,根据erasesize计算
unsigned int writesize_shift; // 写入数据偏移值,根据writesize计算
/* Masks based on erasesize_shift and writesize_shift */
unsigned int erasesize_mask; // 擦除数据大小掩码,根据erasesize_shift计算
unsigned int writesize_mask; // 写入数据大小掩码,根据writesize_shift计算
/*
* read ops return -EUCLEAN if max number of bitflips corrected on any
* one region comprising an ecc step equals or exceeds this value.
* Settable by driver, else defaults to ecc_strength. User can override
* in sysfs. N.B. The meaning of the -EUCLEAN return code has changed;
* see Documentation/ABI/testing/sysfs-class-mtd for more detail.
*/
unsigned int bitflip_threshold;
/* Kernel-only stuff starts here. */
const char *name; // MTD设备名称
int index; // 索引值
/* OOB layout description */
const struct mtd_ooblayout_ops *ooblayout; // oob布局描述
/* NAND pairing scheme, only provided for MLC/TLC NANDs */
const struct mtd_pairing_scheme *pairing;
/* the ecc step size. */
unsigned int ecc_step_size;
/* max number of correctible bit errors per ecc step */
unsigned int ecc_strength;
/* Data for variable erase regions. If numeraseregions is zero,
* it means that the whole device has erasesize as given above.
*/
int numeraseregions; // 可变擦除区域的数目,通常为1
struct mtd_erase_region_info *eraseregions; // 可变擦除区域
/*
* Do not call via these pointers, use corresponding mtd_*()
* wrappers instead.
*/
int (*_erase) (struct mtd_info *mtd, struct erase_info *instr); // 擦除
int (*_point) (struct mtd_info *mtd, loff_t from, size_t len,
size_t *retlen, void **virt, resource_size_t *phys);
int (*_unpoint) (struct mtd_info *mtd, loff_t from, size_t len);
int (*_read) (struct mtd_info *mtd, loff_t from, size_t len, // 读取
size_t *retlen, u_char *buf);
int (*_write) (struct mtd_info *mtd, loff_t to, size_t len, // 写入
size_t *retlen, const u_char *buf);
int (*_panic_write) (struct mtd_info *mtd, loff_t to, size_t len,
size_t *retlen, const u_char *buf);
int (*_read_oob) (struct mtd_info *mtd, loff_t from,
struct mtd_oob_ops *ops);
int (*_write_oob) (struct mtd_info *mtd, loff_t to,
struct mtd_oob_ops *ops);
int (*_get_fact_prot_info) (struct mtd_info *mtd, size_t len,
size_t *retlen, struct otp_info *buf);
int (*_read_fact_prot_reg) (struct mtd_info *mtd, loff_t from,
size_t len, size_t *retlen, u_char *buf);
int (*_get_user_prot_info) (struct mtd_info *mtd, size_t len,
size_t *retlen, struct otp_info *buf);
int (*_read_user_prot_reg) (struct mtd_info *mtd, loff_t from,
size_t len, size_t *retlen, u_char *buf);
int (*_write_user_prot_reg) (struct mtd_info *mtd, loff_t to,
size_t len, size_t *retlen, u_char *buf);
int (*_lock_user_prot_reg) (struct mtd_info *mtd, loff_t from,
size_t len);
int (*_writev) (struct mtd_info *mtd, const struct kvec *vecs,
unsigned long count, loff_t to, size_t *retlen);
void (*_sync) (struct mtd_info *mtd);
int (*_lock) (struct mtd_info *mtd, loff_t ofs, uint64_t len);
int (*_unlock) (struct mtd_info *mtd, loff_t ofs, uint64_t len);
int (*_is_locked) (struct mtd_info *mtd, loff_t ofs, uint64_t len);
int (*_block_isreserved) (struct mtd_info *mtd, loff_t ofs);
int (*_block_isbad) (struct mtd_info *mtd, loff_t ofs);
int (*_block_markbad) (struct mtd_info *mtd, loff_t ofs);
int (*_max_bad_blocks) (struct mtd_info *mtd, loff_t ofs, size_t len);
int (*_suspend) (struct mtd_info *mtd);
void (*_resume) (struct mtd_info *mtd);
void (*_reboot) (struct mtd_info *mtd);
/*
* If the driver is something smart, like UBI, it may need to maintain
* its own reference counting. The below functions are only for driver.
*/
int (*_get_device) (struct mtd_info *mtd);
void (*_put_device) (struct mtd_info *mtd);
struct notifier_block reboot_notifier; /* default mode before reboot */
/* ECC status information */
struct mtd_ecc_stats ecc_stats;
/* Subpage shift (NAND) */
int subpage_sft;
void *priv;
struct module *owner;
struct device dev;
int usecount;
struct mtd_debug_info dbg;
struct nvmem_device *nvmem;
};
mtd_info结构体中的read()、write()、read_oob()、write_oob()、erase()是MTD设备驱动要实现的主要函数,这是
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











