






在《直流有刷电机及机械特性》我们对直流有刷电机的工作原理、机械特性以及电动机的启动、制动、调速进行了详细的介绍。本节主要介绍电机的驱动器以及调速控制方案的实现。
一、电机介绍
由于我们需要学习直流有刷电机的控制,所以我们手里必须要有一款直流有刷电机。
这里我在淘宝购买的电机为:常规775 高速电机吹风机马达电动机双滚珠轴承高转速调速 12V~24V。
具体型号信息:电压为24V,转速一分钟20000转,双出轴。
1.1 产品参数
直流有刷电机电机参数如下:
| 品牌 | Vantel | 型号 | VT-775 |
|---|---|---|---|
| 品名 | 直流高速电机 | 工作电压 | 12/24V |
| 转速 | 6000 ~ 20000转 | 功率 | 30W |
| 电流 | 0.5A | 连续旋转寿命 | 1000小时 |
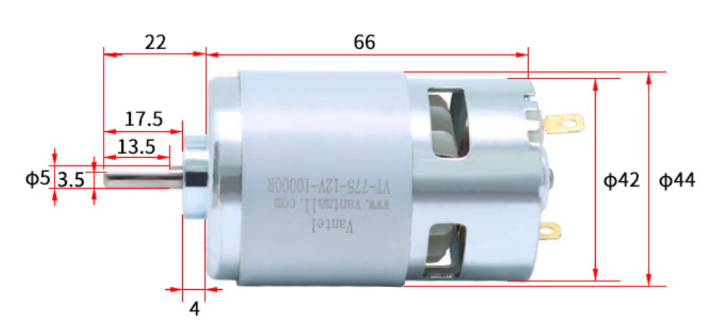
| 电机尺寸 | 44*66mm | 出轴尺寸 | \(\phi\) 5*17.5mm |
| 调速方式 | PWM/无极调速 | 最大转矩 | 0.6kgf.cm |
1.1.1 图纸
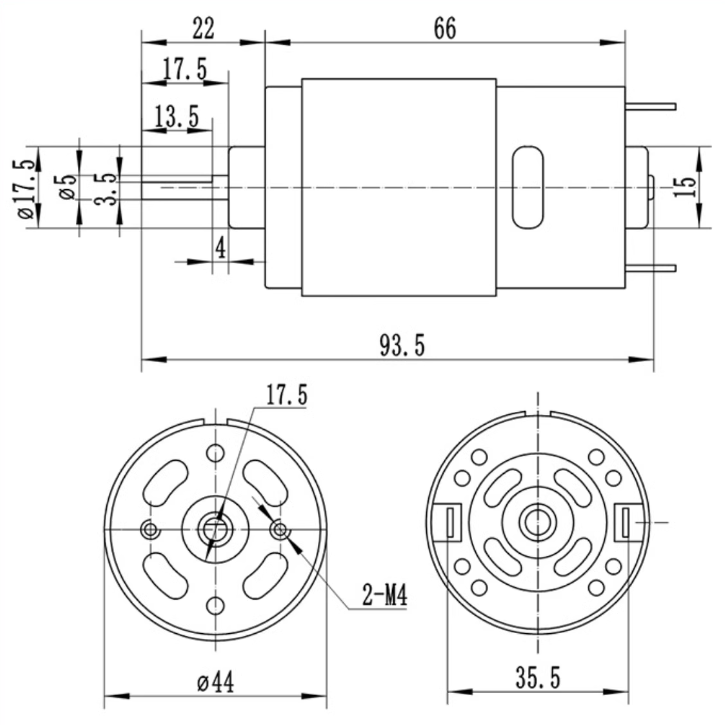
1.1.2 实物尺寸图
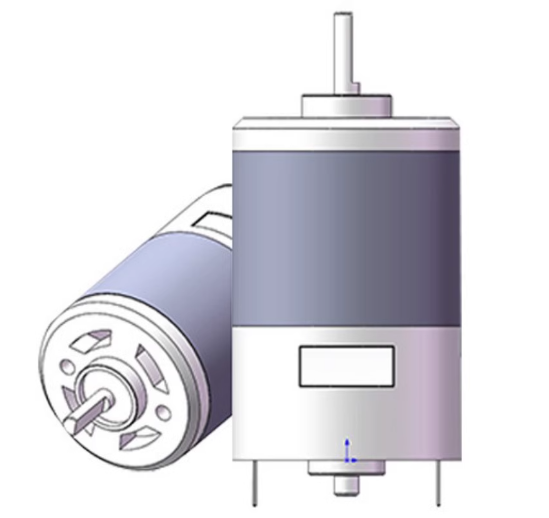
1.1.3 3D建模图
1.2 性能参数
| 转速 | 工作电压 | 功率 | 转矩 | 空载电流 |
|---|---|---|---|---|
| 6000R | 12V | 30W | 0.6kfg.cm | 0.4A |
| 10000R | 12V | 30W | 0.6kfg.cm | 0.4A |
| 12000R | 24V | 30W | 0.6kfg.cm | 0.5A |
| 20000R | 24V | 30W | 0.6kfg.cm | 0.5A |
由于我们选择的具体型号为电压为24V,转速一分钟20000转,双出轴。所以我们参考最后一行性能数据。
1.2.1 常规单位换算
这里我们看到的转矩单位为0.6kfg.cm,这个和我们经常见到的N.m如何进行换算呢?
| gf.cm | kgf.cm | N.m | mN.m | N.cm |
|---|---|---|---|---|
| 1.0 | 0.001 | 0.000098 | 0.098 | 0.0098 |
| 1000 | 1.0 | 0.098 | 98 | 9.8 |
| 10,204.08 | 10.204 | 1.0 | 1000 | 100 |
| 10.20 | 0.010 | 0.001 | 1.0 | 0.1 |
| 102.04 | 0.102 | 0.01 | 10 | 1.0 |
1.2.2 选型标准
通常点击参数表扭矩代表的是什么意思?
电机标准转矩为\(10kg.cm\),假设使用皮带轮传动,皮带轮的半径为\(1cm\)。皮带输出的拉力就是\(10kg\)。
如果皮带轮的半径为\(2cm\)。皮带输出的拉力就是\(5kg\)。
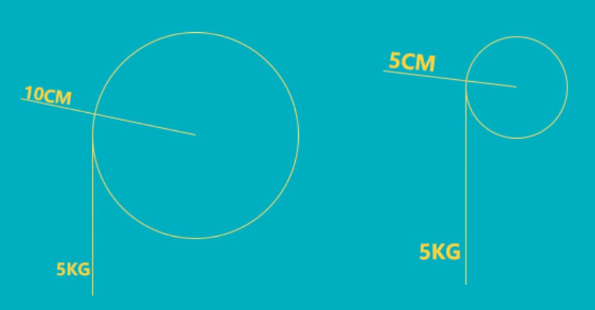
1.2.3 扭矩概念
扭矩 = 垂直于力臂的拉力 x 力劈。
例如:滚筒起吊,左图滚筒半径 = 力臂 = \(10cm\),起重量 = \(5kg\),需要扭矩 = \(5kg \times 10cm = 50 kg.cm\)。
右图滚筒半径 = 力臂 = \(5cm\),起重量 = \(5kg\),需要扭矩 = \(5kg \times 5cm = 25 kg.cm\)。
从该例子看出力臂很重要,同样重量起吊扭矩完全不一样,不同用法要看实际计算。
1.2.4 调速范围
正常且合理的调速范围应为\(50\% \sim 100\%\)。调速器越往下调速,速度就越慢,力道就越大。
二、驱动器设计
2.1 为什么要用驱动
MCU的IO口的电流输出能力一般在20mA左右,那么输出功率\(P=UI=3.3V*20mA=66mW\)。
而我们所使用的VT-775直流电机的额定功率为\(20W\),很显然,\(66mW\)的驱动能力驱动能力是无法推动\(30W\)的负载的。
所以MCU的IO口输出的PWM信号,必须经过功率放大才能驱动电机,直流电机通常采用H桥进行驱动。
2.2 H桥工作原理
下面以MOS管搭建的H桥电路解释电机正反转控制。要使电机运转,必须使对角线上的一对MOS管导通。如下图;
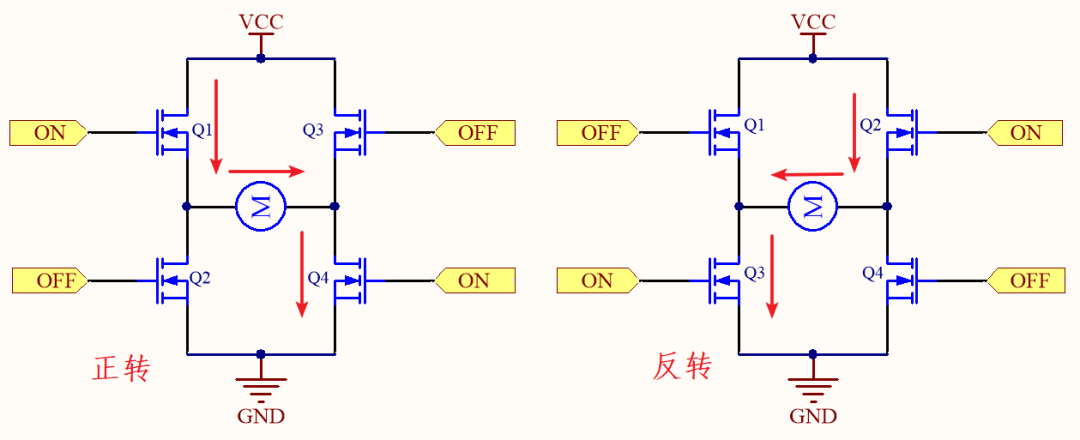
当Q1管和Q4管导通时(此时必须保证Q2和Q3关断),电流就从电源正极经Q1从左至右流过电机,然后再经Q4回到电源负极。按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。
另一对MOS管Q2和Q3导通的时候(此时必须保证Q1和Q4关断),电流从右至左流过电机,从而驱动电机沿逆时针方向转动。
驱动电机时,保证H桥两个同侧的MOS管不会同时导通非常重要,如果MOS管Q1和Q2同时导通,那么电流就会从电源正极穿过两个MOS管直接回到负极,此时电路中除了MOS管外没有其它任何负载,因此电路上的电流就达到最大值,烧坏MOS管和电源。Q3和Q4同时导通是同样的道理。
简单的开关只能控制电机正反转,引入PWM控制可以实现方向和速度调节。调节占空比实现控速,占空比越大平均电压(电流)越大,速度越快PWM频率一般在10KHz~20KHz之间。频率太低会导致电机转速过低,噪声较大。频率太高,会因为MOS管的开关损耗而降低系统的效率。
根据不同桥臂的PWM控制方式不同,大致上可以分为三种控制模式:受限单极模式、单极模式、双极模式。
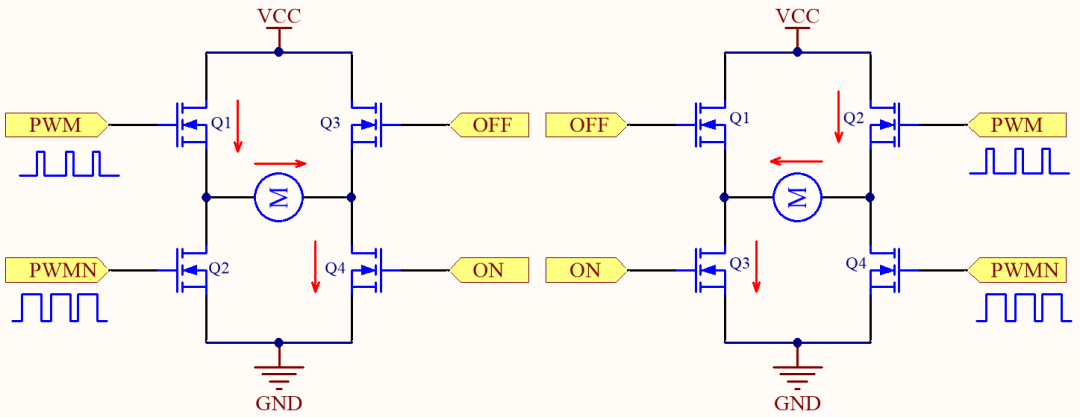
2.2.1 受限单极模式
1)工作原理
控制方式:在一个PWM周期内,只有一个桥臂进行PWM调制,另一个桥臂保持固定状态(常开或常闭)。
电流路径:电流在电机中单向流动,通过PWM调制控制电机的平均电压。
2)优点
效率高:由于只有一个桥臂进行PWM调制,开关损耗较小。
控制简单:实现相对简单,适用于单向控制。
3)缺点
无法反转:只能实现单向控制,无法实现电机的正反转。
应用受限:适用于不需要反转的应用场景。
2.2.2 单级模式
1)工作原理
控制方式:在一个PWM周期内,两个桥臂中的一个进行PWM调制,另一个桥臂保持固定状态(常开或常闭)。
电流路径:电流在电机中双向流动,通过PWM调制控制电机的平均电压和方向。
2)优点
可反转:可以实现电机的正反转。
效率较高:开关损耗相对较小。
3)缺点
控制复杂:相比受限单极模式,控制逻辑稍复杂。
应用场景:适用于需要正反转但不需要频繁切换的应用。
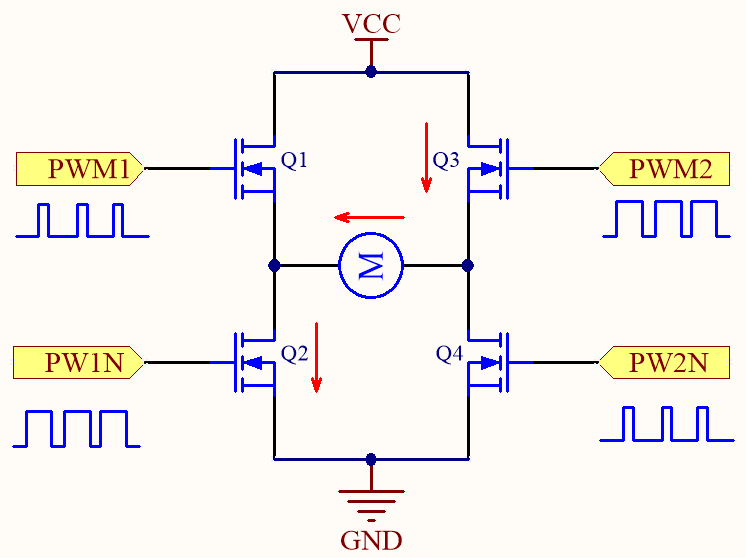
2.2.3 双级模式
1)工作原理
控制方式:在一个PWM周期内,两个桥臂都进行PWM调制,且调制信号互补。
电流路径:电流在电机中双向流动,通过PWM调制控制电机的平均电压和方向。
2)优点
快速响应:可以实现快速的电机正反转和速度调节。
精确控制:适用于需要高精度控制的应用场景。
3)缺点
效率较低:由于两个桥臂都进行PWM调制,开关损耗较大。
控制复杂:控制逻辑复杂,需要精确的PWM信号生成。
2.3 L298N芯片
通常在驱动电机的时候我们会选择集成H桥的IC,因为H桥使用分立元件搭建比较麻烦,增加了硬件设计难度。
当然如果集成IC无法满足我们的功率要求时,还是需要我们自己使用MOS管、三极管等元件来搭建H桥电路, 这样的分立元件搭建的H桥一般驱动能力都会比集成IC要高。
当我们在选择集成IC时, 我们需要考虑集成IC是否能满足电机的驱动电压要求,是否能承受电机工作时的电流等情况。
市面上已经有很多比较常用的IC方案,比如常用的L293D、L298N、TA7257P、SN754410等。接上电源、电机,通过输入控制信号就可以驱动电机了。
L298N驱动板使用了优质的L298N作为驱动芯片。具有驱动能力强发热量低,抗干扰能力强的特点。
2.3.1 基本介绍
L298N芯片是ST公司的一款电机驱动芯片,可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。L298N芯片主要特点是:
- 工作电压高,工作电压最高可达\(46V\);
- 输出电流大,瞬间峰值电流可达\(3A\),持续工作电流为\(2A\);
- 额定功率\(25W\);
- 内含两个
H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机,继电器线圈等感性负载; - 采用标准逻辑电平信号控制具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件;
- 接收标准的
TTL逻辑电平信号; - 可以外接检测电阻,将变化量反馈给控制电路。
2.3.2 功能框图
L298N芯片内部结构如下图所示:
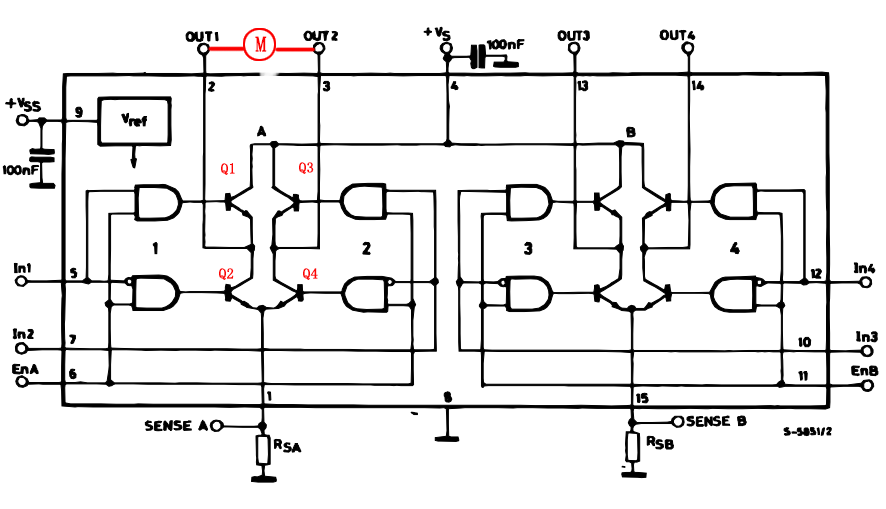
L298N驱动芯片,它内部用两个H桥电路。我们分别称之为A和B;
A电路分别有3个控制端口:分别是ENA、IN1、IN2;B电路分别有3个控制端口:分别是ENA,IN3,IN4。
15脚封装;
| 脚名称 | 引脚标号 | I/O | 功能 | 引脚名称 | 引脚标号 | I/O | 功能 |
|---|---|---|---|---|---|---|---|
| Sense A | 1 | O | H桥A的电流控制,可通过一个电阻接地限制电流(不限电流时直接接地) | Vss | 9 | – | 给内部逻辑电路供电,一般接5V |
| OUT 1 | 2 | O | H桥A的输出1脚 | IN 3 | 10 | I | H桥B的逻辑输入1 |
| OUT 2 | 3 | O | H桥A的输出2脚 | EN B | 11 | I | H桥B的使能控制端,高电平打开,低电平关闭 |
| Vs | 4 | – | 电机驱动电压3~48V,需要一个100nF的滤波电容接地 | IN 4 | 12 | I | H桥B的逻辑输入2 |
| IN 1 | 5 | I | H桥A的逻辑输入1 | OUT 3 | 13 | O | H桥B的输出1脚 |
| EN A | 6 | I | H桥A的使能控制端,高电平打开,低电平关闭 | OUT 4 | 14 | O | H桥B的输出2脚 |
| IN 2 | 7 | I | H桥A的逻辑输入2 | Sense B | 15 | O | H桥B的电流控制,可通过一个电阻接地限制电流(不限电流时直接接地) |
| GND | 8 | – | 接地 |
2.3.3 逻辑控制
以H桥A为例,L298N逻辑功能表;
| IN1 | IN2 | ENA | 电机状态 |
|---|---|---|---|
| × | × | 0 | 电机停止 |
| 1 | 0 | 1 | 电机正转 |
| 0 | 1 | 1 | 电机反转 |
| 0 | 0 | 1 | 电机停止 |
| 1 | 1 | 1 | 电机停止 |
当IN1和IN2全0时,Q1和Q3截止,电流关断,电路停止工作。
当IN1和IN2全1时,Q2和Q4截止,电流关断,电路也停止工作。
当IN1=0,IN2=1时,Q2和Q3导通,Q1和Q4截止,电流从OUT2端流入电机,从OUT1端流出电机。
当IN1=1,IN2=0时,Q2和Q3截止,Q1和Q4导通,电流从OUT1端流入电机,从OUT2端流出电机。
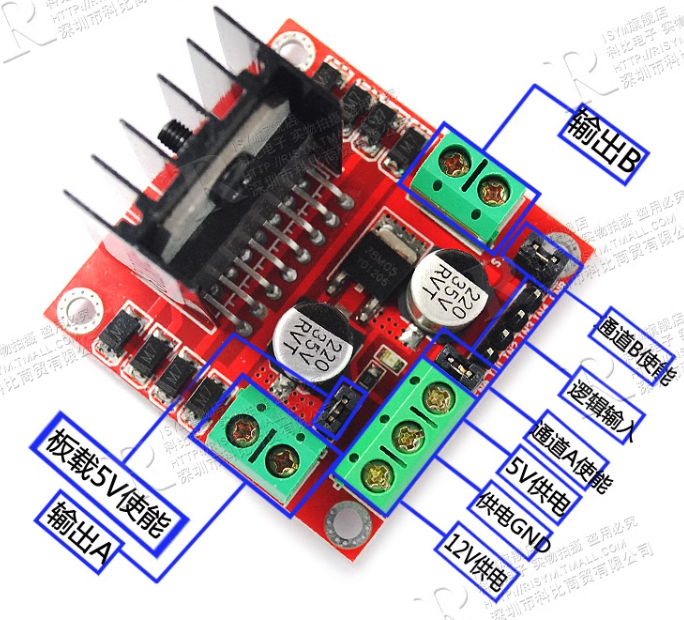
2.4 L298N驱动板
驱动板如下:
2.4.1 产品参数
产品参数:
- 驱动芯片:
L298N双H桥直流电机驱动芯片; - 驱动电压
Vs:+5V~+35V; 如需要板内取电,则供电范围Vs:+5V~+12V; - 驱动电流
Io:2A(MAX单桥); - 逻辑电压Vss
:+5V~+7V`; - 逻辑电流:
0~36mA; - 控制信号输入电压范围:
- 低电平:
-0.3V ≤ Vin ≤ 1.5V; - 高电平:
2.3V ≤ Vin ≤ Vss;
- 低电平:
- 使能信号输入电压范围:
- 低电平:
-0.3V ≤ Vin ≤ 1.5V(控制信号无效); - 高电平:
2.3V ≤ Vin ≤ Vss(控制信号有效);
- 低电平:
- 最大功耗:
25W; - 存储温度:
-20℃ ~ +135℃。
在实际测试的时候发现,H桥输出如果是空载时,输出电压等于\(Vs\);但是如果H桥连接了直流电机,输出电压会有2V的压降。
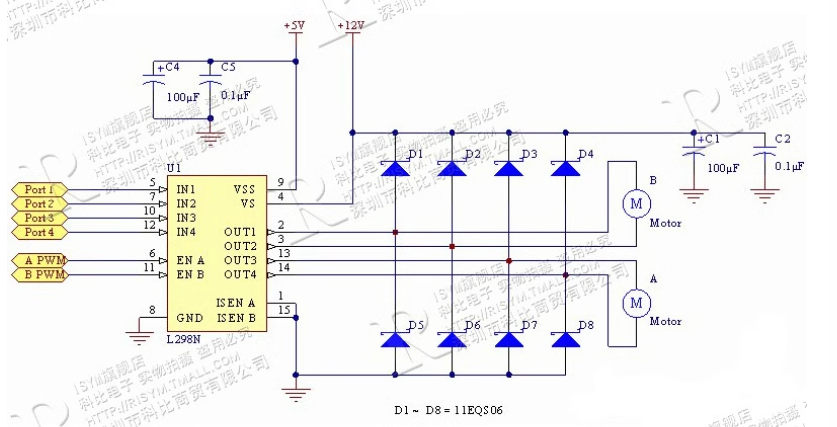
2.4.2 电路原理图
这个模块还有一个板载\(5V\)稳压器78M05(图中并没有画出,主要是我们找到驱动板的原理与图),该稳压器可使用跳线帽的方式进行使能。
在L298N芯片电路中,外接多个二极管(通常是续流二极管或飞轮二极管)的主要目的是为了保护电路和芯片,防止电机在开关过程中产生的反向电动势)对电路造成损坏。以下是详细原因和作用:
1)电枢电动势的产生
- 在《直流有刷电机及机械特性》我们介绍了直流电动机电枢电动势\(E_a = C_e\phi n\)(描述的是电机在稳态运行时的电枢电动势);
- 当电机突然停止或状态突变时,电机的动态特性(如电感)会起主导作用,电枢电动势公式不再完全适用;
- 电机的电枢绕组具有电感 \(L\),电感会存储能量,其大小为 \(\frac{1}{2}LI^2\);
- 电机的机械能会转化为电能,电枢绕组中的电流会迅速减小;
- 根据楞次定律,电感会试图维持电流不变,从而产生一个反向电动势;
- 这个反向电动势(\(U_L=-L\frac{dI}{dt}\))的大小取决于电流变化率\(\frac{dI}{dt}\),可能会远高于电源电压。
2)续流二极管的主要作用是提供一个低阻抗路径,让电枢电动势产生的电流能够安全释放,从而保护电路和芯片;
- 当反向电动势产生时,续流二极管导通,将电流引导回电源,避免高压作用于电路元件。
3)如果没有续流二极管或其他保护电路,反向电动势会通过电路中的其他元件释放,可能导致击穿L298N芯片内部的晶体管或MOSFET。
2.4.3 驱动电压\(7V \sim 12V\)
当驱动电压为\(7V \sim 12V\)时,我们可以启用板载的78M05供给L298N芯片的逻辑电源,指示灯亮,可以不用再外接逻辑电源。
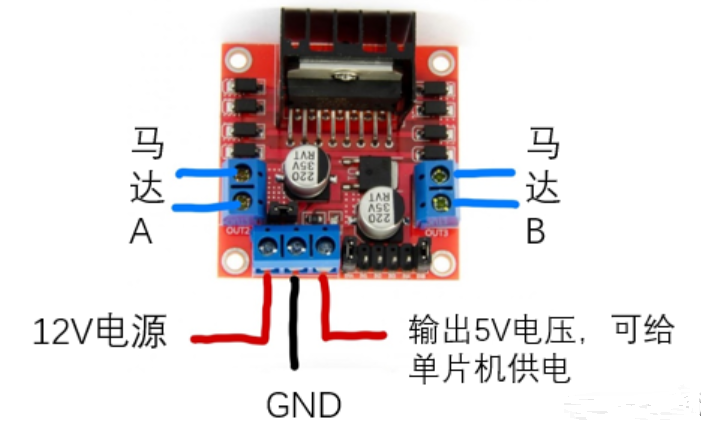
当使用板载\(5V\)供电后,接口中的\(+5V\)供电端子不要输入电压,但是可以引出\(5V\)电压供外部使用。
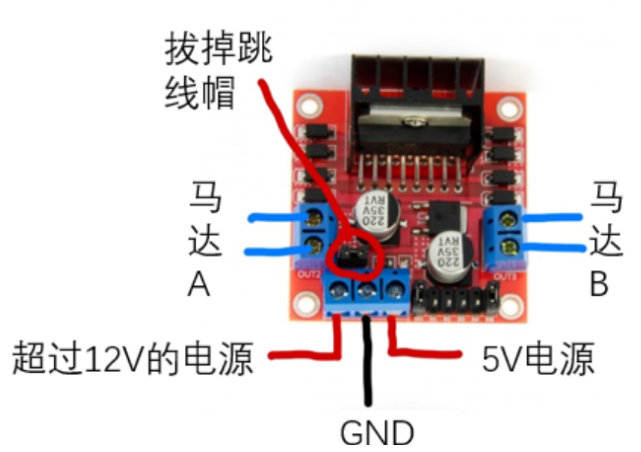
2.4.4 驱动电压\(12V \sim 24V\)
如果驱动电压大于\(12V\),小于等于\(24V\)(芯片手册中提出可以支持到\(35V\),但是按照经验一般L298N保守应用最大电压支持到\(24V\)已经很了不起),则必须断开跳线,因为该电压会损坏板载稳压器78M05。
断开跳线后,指示灯熄灭,不使用板载的78M05供给L298N芯片的逻辑电源,然后再\(5V\)输出端口外接输入\(5V\)电压对L298N芯片内部逻辑电路供电。
2.4.5 补充
LN298N使能端,高电平有效,常态下用跳线帽连接到\(5V\)电平。
注意事项:L298N逻辑供电电压\(Vss\)如果是用另外电源供电的话(即不是和MCU的电源共用),那么需要将MCU的GND和模块上的GND连接在一起,只有这样MCU上过来的逻辑信号才有个参考0点。
三、电机调速控制
在《直流有刷电机及机械特性》我们介绍了直流电机的调速方式主要包括:
- 电枢串电阻调速:属于有级调速,效率低,用于各种对调速性能要求不高的设备上;
- 降压调速:可达到无级调速、低速时电损耗小,效率高;是一种性能优越的调速方法,广泛应用于对调速性能要求较高的设备上;
- 弱磁调速:可达到无级调速、功率损耗小,调速范围较小。
在实际生产中,通常把降压调速和弱磁调速配合起来使用,以电动机的额定转速作为基准,在基速以下调压,在基速以上调磁,以实现双向调速,扩大调节范围。
由于这里我是用的电机定子励磁采用永磁体,因此无法进行弱磁调速,因此本节主要介绍降压调速方式。
只要MCU输出占空比可调的方波,即PWM信号即可控制电机两端的电压发生变化,从而实现电机转速的控制。
3.1 PWM信号调速的原理
脉冲宽度调制(Pulse width modulation,PWM):这种控制方式是指开关管调制信号的周期固定不变,而开关管导通信号的宽度可调。
其具有两个很重要的参数:频率和占空比;
- 频率,就是周期的倒数;
- 占空比,就是高电平在一个周期内所占的比例。
PWM方波的示意图如下图所示:
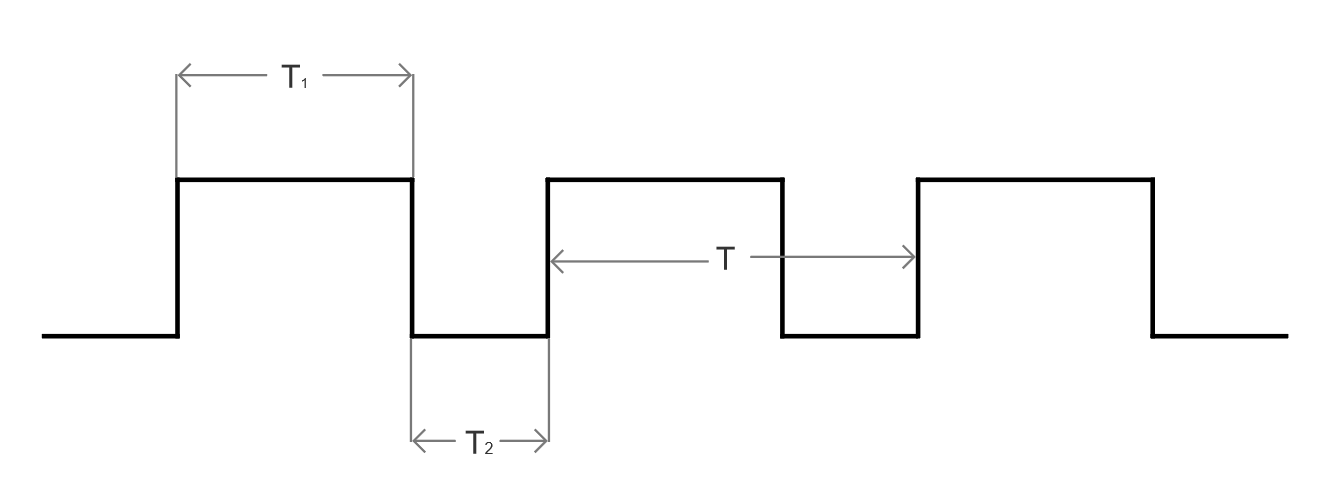
在上图中,频率\(f\)的值为\(\frac{1}{T_1 + T_2}\),占空比\(D\)的值为\(\frac{T_1}{T_1+T_2}\)。
通过改变单位时间内脉冲的个数可以实现调频。
通过改变占空比可以实现调压,平均电压\(U=U_N \cdot D\);
- 占空比越大,所得到的平均电压也就越大,幅值也就越大;
- 占空比越小,所得到的平均电压也就越小,幅值也就越小。
通过以上原理就可以知道,只要改变PWM信号的占空比,就可以改变直流电机两端的平均电压,从而实现直流电机的调速。
3.1.1 直流电机机械特性
我们知道直流电机的机械特性方程式:
式中:
- \(U\)是电枢回路的直流电源电压;
- \(R_a\)为电枢电阻;
- \(R_C\)为电枢回路外串电阻;
- \(C_e\)为电动势常数,\(C_e=\frac{pz}{60a}\);
- \(z\)为电枢绕组的导体中枢;
- \(a\)为并联支路对数;
- \(C_T\)为转矩常数,\(C_T=\frac{pz}{2 \pi a}\);
- \(\phi\)为每极主磁通,\(\phi=B_{av} \tau_p l_e\);
- \(B_{av}\)为每极平均气隙磁通密度,
- \(\tau_p\)值的是两个相邻主极之间的长度,
- \(l_e\)为电枢铁芯的有效长度。
3.1.2 降压调速原理
当电压下降时,则可得到与固有机械特性相互平行的人为机械特性。
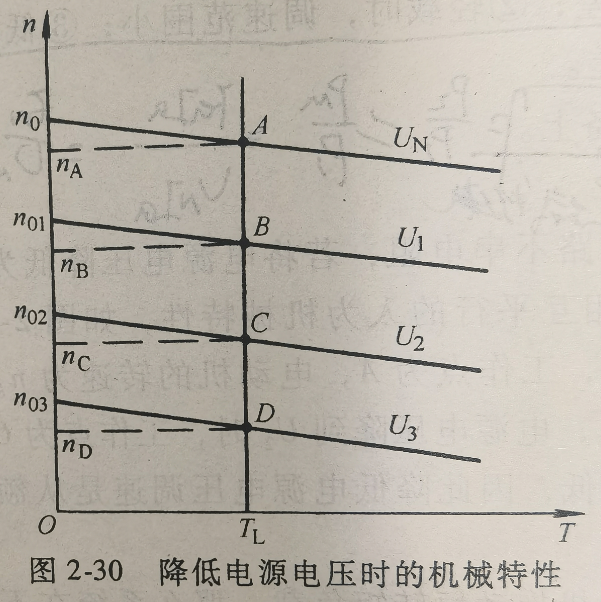
从上图可以看到,相同负载转矩\(T_L\)下,转速随着电压的下降而下降。
因此当占空比\(D(0≤D≤1)\)的大小改变时,电压\(U\)下降,速度\(n\)也会随着下降,所以只要改变占空比就能达到控制速度的目的。
3.2 硬件设计
3.2.2 STM32F103RTC6开发板
我们在《STM32》系列相关博文中介绍了PWM的配置,当时使用的是型号为STM32F103RTC6的开发板。
本节实验只用到了TIM1的CH1和CH2, 即PA8和PA9来输出PWM信号来控制电机,注意主控板需要和电机驱动板供地。
3.2.1 L298N驱动板
这里我们使用到 L298N驱动板H桥A,引脚接线如下:
| L298N驱动板 | STM32开发板 | 其它 |
|---|---|---|
| IN1 | PA8 | |
| IN2 | PA9 | |
| ENA | 使用跳线帽连接到5V | |
| 5V供电 | VT-775电机额定电压为24V,需要拔掉L298N驱动板的跳线帽 外接输入5V电压对L298N芯片内部逻辑电路供电 | |
| 供电GND | 和STM32开发板供地 | |
| 驱动电压 | 24V | |
| OUT1 | 直流电机VT-775的M+端子 | |
| OUT2 | 直流电机VT-775的M-端子 |
3.3 软件设计
接下来我们实现一个功能:
- 按下
KEY0加速电机; - 按下
KEY1减速电机。
既然我们需要实现该功能,就需要实现如下代码:
(1)定时器2通道 CH1以及通用CH2 PWM初始化,设置频率为10kHz,占空比均设置为0;
- 定时器
2通道CH1使用的引脚是PA0; - 定时器
2通道CH2使用的引脚是PA1; - 这里并没有使用定时器
1的通道CH1和CH2,主要是因为串口1的TX引脚和定时器1的CH2引脚冲突了(PA9引脚)。
(2)编写外部中断处理程序:
KEY0连接STM32的PC5,按下时输出低电平;- 配置
GPIOC对应的EXTI线[9:5]外部中断,下降沿触发; - 中断处理函数检测
KEY0按键按下,增加通道CH1的占空比,最大为100;
- 配置
KEY1连接STM32的PA15,按下时输出低电平;- 配置
PA15对应的EXTI线[15:10]外部中断,下降沿触发; - 中断处理函数检测
KEY1按键按下,减小通道CH1的占空比,最小为0。
- 配置
3.3.1 main函数实现
#include "common.h"
#include "stdio.h"
#include "motor.h"
int main()
{
int duty;
STM32_Clock_Init(9); //系统时钟初始化
// 串口初始化
STM32_NVIC_Init(2,USART1_IRQn,0,1); //串口中断优先级初始化,其中包括中断使能
usart_init(USART_1,115200); //串口1初始化,波特率115200 映射到PA9 PA10
// 按键KEY初始化
gpio_init(PC5,GPI_UP,HIGH); //PC5接按键KEY0
gpio_init(PA15,GPI_UP,HIGH); //PC5接按键KEY0
Ex_NVIC_Congig(PC5,FALLING); //按键KEY0按下触发 高电平->低电平
Ex_NVIC_Congig(PA15,FALLING); //按键KEY1按下触发 高电平->低电平
STM32_NVIC_Init(2,EXTI9_5_IRQn,2,2); //EXTI线[9:5]中断优先级初始化,其中包括中断使能
STM32_NVIC_Init(2,EXTI15_10_IRQn,2,2); //EXTI线[15:10]中断优先级初始化,其中包括中断使能
motor_init(); // 电机初始化
while(1)
{
duty = get_motor_duty();
printf("duty: %d\n",duty);
delay_ms(1000);
}
}3.3.2 motor.h
motor.h为直流电机驱动头文件:
/******************************************************************************************************
*
* Function : 直流有刷电机控制,L298N驱动板
使用定时器TIME2 CH1生成PWM1,使用PA0引脚
使用定时器TIME2 CH2生成PWM2,使用PA1引脚
*
*
*********************************************************************************************************/
#ifndef _STM32f10x__MOTOR_H
#define _STM32f10x__MOTOR_H
#include "pwm.h"
/*******************************************************************************************/
extern void motor_init(void); //电机初始化
extern void motor_speed_up(void); //电机加速
extern void motor_slow_down(void); //电机减速
extern int get_motor_duty(void); //获取电机PWM占空比
#endif3.3.3 motor.c
motor.c为直流电机驱动源文件:
/*********************************************************************************************/
#include "motor.h"
/* 电机占空比 */
volatile int g_motor_pwm = 0;
/* 电机正转/反转 */
volatile bool g_motor_fwd = TRUE;
/**************************************************************************************************
*
* Function : 电机初始化
*
**************************************************************************************************/
void motor_init(void)
{
//电机初始化********************************************************
TIM_PWM_Init(TIMER2, 10, PWM_CH1); // PWM初始化,频率为10kHz PA0
TIM_PWM_Init(TIMER2, 10, PWM_CH2); // PWM初始化,频率为10kHz PA1
TIM_PWM_Duty(TIMER2, 0, PWM_CH1);
TIM_PWM_Duty(TIMER2, 0, PWM_CH2);
}
/**************************************************************************************************
*
* Function : 刷新电机速度
*
**************************************************************************************************/
void motor_update_speed(void)
{
// 电机正转
if(g_motor_fwd)
{
TIM_PWM_Duty(TIMER2, g_motor_pwm, PWM_CH1);
TIM_PWM_Duty(TIMER2, 0, PWM_CH2);
}
else
{
TIM_PWM_Duty(TIMER2, 0, PWM_CH1);
TIM_PWM_Duty(TIMER2, g_motor_pwm, PWM_CH2);
}
}
/**************************************************************************************************
*
* Function : 电机加速
*
**************************************************************************************************/
void motor_speed_up(void)
{
g_motor_pwm++;
if(g_motor_pwm >100)
{
g_motor_pwm = 100;
}
motor_update_speed();
}
/**************************************************************************************************
*
* Function : 电机减速
*
**************************************************************************************************/
void motor_slow_down(void)
{
g_motor_pwm--;
if(g_motor_pwm < 0)
{
g_motor_pwm = 0;
}
motor_update_speed();
}
/**************************************************************************************************
*
* Function : 获取电机PWM占空比
*
**************************************************************************************************/
int get_motor_duty(void)
{
return g_motor_pwm;
}3.3.4 EXTI9_5_IRQHandler中断处理函数
在EXTI9_5_IRQHandler中断处理函数中实现了KEY0按键按下电机加速的功能;
/*********************************************************************************************************************
* Function Name : EXTI9_5_IRQHandler
* Description : This function handles External lines 9 to 5 interrupt request.
* Input : None
* Output : None
* Return : None
*************************************************************************************************************************/
void EXTI9_5_IRQHandler(void)
{
if( EXTI->PR & 1<<5 ) //来自中断线5上的中断
{
//**********************自定义用户任务****************************//
motor_speed_up();
//*****************************************************************//
EXTI->PR = 1<<5; //清中断线5上的中断标志
}
if( EXTI->PR & 1<<6 ) //来自中断线6上的中断
{
//**********************自定义用户任务****************************//
//*****************************************************************//
EXTI->PR = 1<<6; //清中断线6上的中断标志
}
if( EXTI->PR & 1<<7 ) //来自中断线7上的中断
{
//**********************自定义用户任务****************************//
//*****************************************************************//
EXTI->PR = 1<<7; //清中断线7上的中断标志
}
if( EXTI->PR & 1<<8 ) //来自中断线8上的中断
{
//**********************自定义用户任务****************************//
//*****************************************************************//
EXTI->PR = 1<<8; //清中断线8上的中断标志
}
if( EXTI->PR & 1<<9 ) //来自中断线9上的中断
{
//**********************自定义用户任务****************************//
//*****************************************************************//
EXTI->PR = 1<<9; //清中断线9上的中断标志
}
}3.3.5 EXTI15_10_IRQHandler中断处理函数
在EXTI15_10_IRQHandler中断处理函数中实现了KEY1按键按下电机减速的功能;
/***********************************************************************************************************************
* Function Name : EXTI15_10_IRQHandler
* Description : This function handles External lines 15 to 10 interrupt request.
* Input : None
* Output : None
* Return : None
*************************************************************************************************************************/
void EXTI15_10_IRQHandler(void)
{
if( EXTI->PR & 1<<10 ) //来自中断线10上的中断
{
//**********************自定义用户任务****************************//
//*****************************************************************//
EXTI->PR = 1<<10; //清中断线10上的中断标志
}
if( EXTI->PR & 1<<11 ) //来自中断线11上的中断
{
//**********************自定义用户任务****************************//
//*****************************************************************//
EXTI->PR = 1<<11; //清中断线11上的中断标志
}
if( EXTI->PR & 1<<12 ) //来自中断线12上的中断
{
//**********************自定义用户任务****************************//
//*****************************************************************//
EXTI->PR = 1<<12; //清中断线12上的中断标志
}
if( EXTI->PR & 1<<13 ) //来自中断线13上的中断
{
//**********************自定义用户任务****************************//
//*****************************************************************//
EXTI->PR = 1<<13; //清中断线13上的中断标志
}
if( EXTI->PR & 1<<14 ) //来自中断线14上的中断
{
//**********************自定义用户任务****************************//
//*****************************************************************//
EXTI->PR = 1<<14; //清中断线14上的中断标志
}
if( EXTI->PR & 1<<15 ) //来自中断线15上的中断
{
//**********************自定义用户任务****************************//
motor_slow_down();
//*****************************************************************//
EXTI->PR = 1<<15; //清中断线15上的中断标志
}
}3.3.6 测试
编译程序并下载测试,我们通过按下KEY0/KEY1调节占空比,可以通过串口查看当前输出的占空比;

如果有条件的话,这里我们先不连接电机,先通过示波器连接到STM32开发板的PWM输出引脚上,通过示波器来观察PWM的变化情况,这里我们将PA0引脚连接到逻辑分析仪的通道0,PA1引脚连接到逻辑分析仪的通道1;
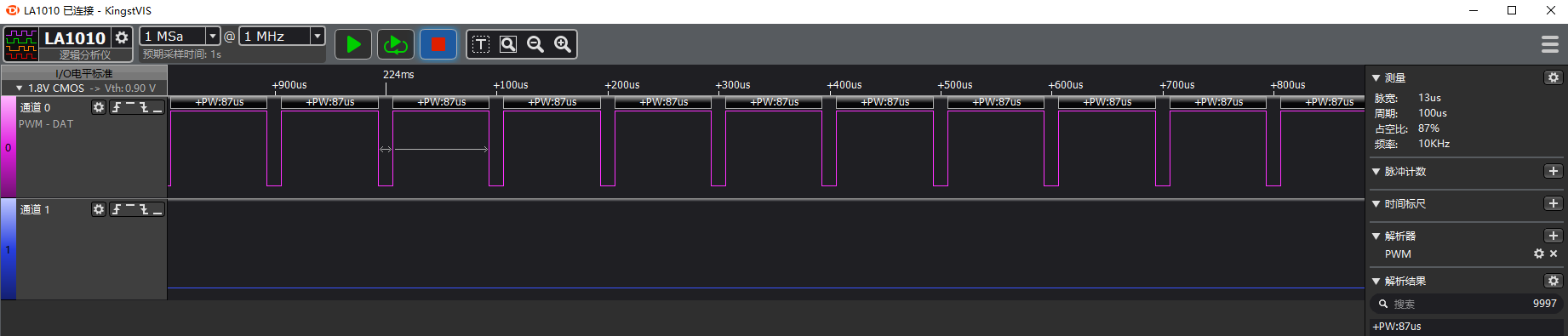
上图中:
- 红色波形为
CH1通道,时钟周期为100us,换算成频率就是10kHz,此时的占空比为87,与我们设置的一致; - 蓝色波形为
CH2通道,始终为低电平。
当CH1和CH2都为低电平时,电机停止转动。当CH1上的平均电压大于电机的启动电压后电机就可以转动了,电源电压为\(24V\),占空比为\(D\),则平均电压为:\(24V \times D\)。
在确定PWM输出正确后我们就可以接上电机进行验证我们的程序了。
四、源码下载
源码下载路径:stm32f103。
参考文章
[1] 直流有刷电机的驱动电路设计
[2] 4. 直流有刷电机


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











