







AOE网络:如果在有向无环图中用有向边表示一个工程中的各项活动,用有向边上的权值表示活动的持续时间,用顶点表示事件,则这种有向图叫做用边表示活动的网络,简称AOE网络。
AOE网络的用途
(1)完成整个工程至少需要多长时间
(2)为缩短工程所需的时间,应加快哪些活动
关键路径:完成整个工程所需的时间取决于从源点到汇点的最长路径长度,这条路径最长的路径就称为关键路径。(Critical Path);
常用的量:(1)事件Ei的最早可能开始时间,记为Ee[i].是从源点到顶点Ei的最长路径长度
(2)事件Ei的最迟可能开始时间,记为El[i].El[i]是在保证汇点En-1在Ee[n-1]时刻完成的前提下,事件Ei允许开始的最迟时间,它等于Ee[n-1]减去从Ei到En-1的最长路径长度。
(3)活动ak的最早可能开始时间,记为e[k]。设活动在有向边<Ei,Ej>上,e[k]=Ee[i].
(4)活动ak最迟允许开始的时间,记为l[l]. l[k]=El[j]-dur<Ei,Ej>的值。
松弛时间:l[k]-e[k]
求Ee[i]的递推公式,从Ee[0]=0开始,向前递推:
Ee[i]=max{Ee[j]+dur(<Ej,Ei>)}.
求El[i]的递推公式。从El[n-1]=Ee[n-1]开始,反向递推
El[i]=min{ El[j]-dur(<Ei,Ej>) }.
这两个递推公式必须在拓扑有序及逆拓扑有序的前提下进行。所谓逆拓扑有序,就是首先输出出度为0的顶点,以相反的次序输出拓扑排序序列,这种排序称为逆拓扑排序。
也就是说,在计算Ee[i]时,Ei的所有前驱顶点Ej的Ee[j]都已经求出。反之,在计算El[i]时,Ei的所有后继顶点El[j]都已经求出
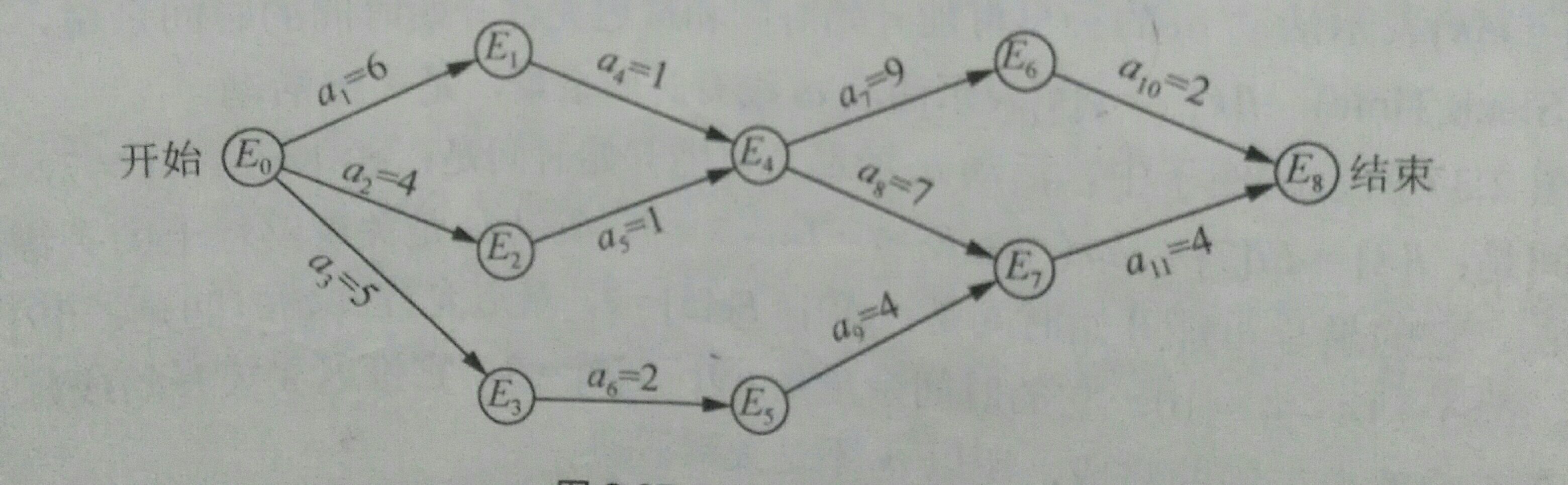
例题:求如图所示的AOE网络的关键路径并输出。首先输入顶点个数n和边个数m,然后依次输入每条边
#include<cstdio>
#include<iostream>
#include<cstring>
using namespace std;
#define MAXN 100///顶点数目的最大值
#define MAXM 200///边的数目的最大值
struct ArcNode
{
int to,dur,no;///no为活动序号
ArcNode *next;
};
int n,m;
ArcNode *list1[MAXN];///出边表的表头指针
ArcNode *list2[MAXN];///入边表的表头指针
int count1[MAXN];///各顶点的入度
int count2[MAXN];///各顶点的出度
int Ee[MAXN];///各事件最早可能开始的时间
int El[MAXN];///各事件允许开始的最迟时间
int e[MAXM];///各活动最早可能开始的时间
int l[MAXM];///各活动允许最晚可以开始的时间
void CriticalPath();
int main()
{
int i,j;
int u,v,w;
while(scanf("%d%d",&n,&m)!=EOF)///顶点数和边数
{
if(n==0&&m==0) break;
memset(list1,0,sizeof(list1));
memset(list2,0,sizeof(list2));
memset(count1,0,sizeof(count1));
memset(count2,0,sizeof(count2));
ArcNode *temp1,*temp2;
for(i=0;i<m;i++)
{
scanf("%d%d%d",&u,&v,&w);
count1[v]++;
temp1=new ArcNode;///构造邻接表
temp1->to=v;
temp1->dur=w;
temp1->no=i+1;
temp1->next=NULL;
if(list1[u]==NULL)
list1[u]=temp1;
else
{
temp1->next=list1[u];
list1[u]=temp1;
}
count2[u]++;
temp2=new ArcNode;///构造逆邻接表
temp2->to=u;
temp2->dur=w;
temp2->no=i+1;
temp2->next=NULL;
if(list2[v]==NULL)
list2[v]=temp2;
else
{
temp2->next=list2[v];
list2[v]=temp2;
}
}
CriticalPath();
///释放边链表上各边结点所占用的空间
for(i=0;i<n;i++)
{
temp1=list1[i];
temp2=list2[i];
while(temp1!=NULL)
{
list1[i]=temp1->next;
delete temp1;
temp1=list1[i];
}
while(temp2!=NULL)
{
list2[i]=temp2->next;
delete temp2;
temp2=list2[i];
}
}
}
return 0;
}
void CriticalPath()
{
///拓扑排序求Ee;
int i,j,k;
int top1=-1;
ArcNode *temp1;
memset(Ee,0,sizeof(Ee));
for(i=0;i<n;i++)///找出入度为0的点
{
if(count1[i]==0)
{
count1[i]=top1;
top1=i;
}
}
for(i=0;i<n;i++)
{
if(top1==-1)
{
printf("Network has a cycle\n");
return ;
}
else
{
j=top1;
top1=count1[top1];
temp1=list1[j];
while(temp1!=NULL)
{
k=temp1->to;
count1[k]--;
if(count1[k]==0)
{
count1[k]=top1;
top1=k;
}
if(Ee[j]+temp1->dur>Ee[k])
Ee[k]=Ee[j]+temp1->dur;
temp1=temp1->next;
}
}
}
///逆拓扑排序求El;
int top2=-1;
ArcNode *temp2;
for(i=0;i<n;i++)///找出出度为0的顶点
{
El[i]=Ee[n-1];///初始化为已知的最大值
if(count2[i]==0)
{
count2[i]=top2;
top2=i;
}
}
for(i=0;i<n;i++)
{
j=top2;
top2=count2[top2];
temp2=list2[j];
while(temp2!=NULL)
{
k=temp2->to;
count2[k]--;
if(count2[k]==0)
{
count2[k]=top2;
top2=k;
}
if(El[j]-temp2->dur<El[k])
El[k]=El[j]-temp2->dur;
temp2=temp2->next;
}
}
///输出Ee[i]和El[i]
for(i=0;i<n;i++)
cout<<Ee[i]<<" ";
cout<<endl;
for(i=0;i<n;i++)
cout<<El[i]<<" ";
cout<<endl;
///求各种活动的e[k]和l[k];
memset(e,0,sizeof(e));
memset(l,0,sizeof(l));
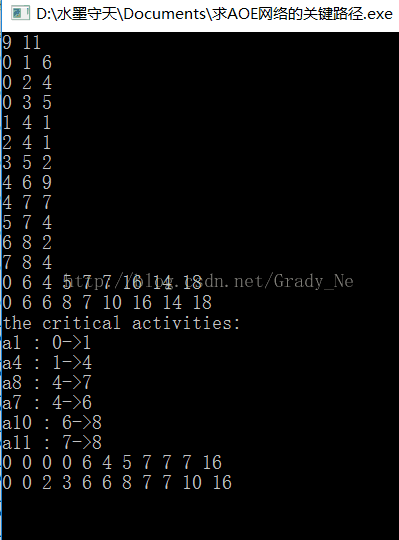
printf("the critical activities:\n");
for(i=0;i<n;i++)
{
temp1=list1[i];
while(temp1!=NULL)
{
j=temp1->to;///有向边<i,j>;
k=temp1->no;
e[k]=Ee[i];
l[k]=El[j]-temp1->dur;
if(e[k]==l[k])
{
printf("a%d : %d->%d\n",k,i,j);
}
temp1=temp1->next;
}
}
///输出e[i]和l[i]的值
for(i=0;i<m;i++)
cout<<e[i]<<" ";///为啥前四个都为0??因为是最早可能开始的时间
cout<<endl;
for(i=0;i<m;i++)
cout<<l[i]<<" ";
cout<<endl;
}
TMD书上的测试数据竟然给错,还好有超哥相助,多谢超哥















 5921
5921

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









