







【书本上的算法往往讲得非常复杂,我和我的朋友计划用一些简单通俗的例子来描述算法的流程】
匈牙利算法是由匈牙利数学家Edmonds于1965年提出,因而得名。匈牙利算法是基于Hall定理中充分性证明的思想,它是部图匹配最常见的算法,该算法的核心就是寻找增广路径,它是一种用增广路径求二分图最大匹配的算法。
-------等等,看得头大?那么请看下面的版本:
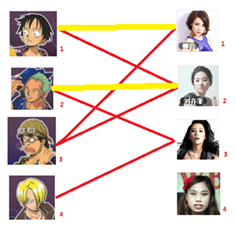
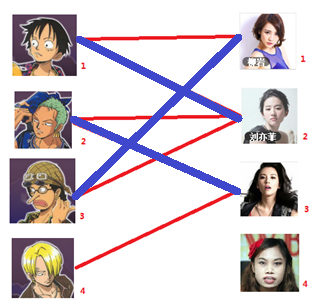
通过数代人的努力,你终于赶上了剩男剩女的大潮,假设你是一位光荣的新世纪媒人,在你的手上有N个剩男,M个剩女,每个人都可能对多名异性有好感( -_-||暂时不考虑特殊的性取向),如果一对男女互有好感,那么你就可以把这一对撮合在一起,现在让我们无视掉所有的单相思(好忧伤的感觉
-_-||暂时不考虑特殊的性取向),如果一对男女互有好感,那么你就可以把这一对撮合在一起,现在让我们无视掉所有的单相思(好忧伤的感觉 ),你拥有的大概就是下面这样一张关系图,每一条连线都表示互有好感。
),你拥有的大概就是下面这样一张关系图,每一条连线都表示互有好感。
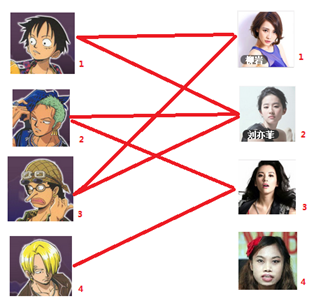
本着救人一命,胜造七级浮屠的原则,你想要尽可能地撮合更多的情侣,匈牙利算法的工作模式会教你这样做:
===============================================================================
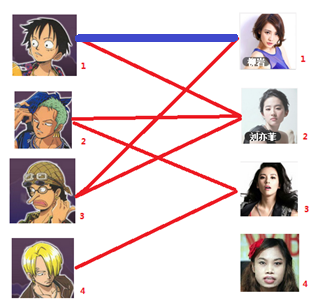
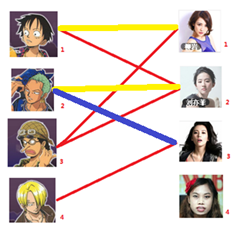
一: 先试着给1号男生找妹子,发现第一个和他相连的1号女生还名花无主,got it,连上一条蓝线
===============================================================================
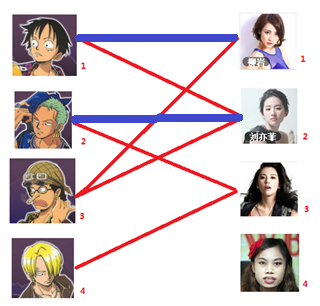
二:接着给2号男生找妹子,发现第一个和他相连的2号女生名花无主,got it
===============================================================================
三:接下来是3号男生,很遗憾1号女生已经有主了,怎么办呢?
我们试着给之前1号女生匹配的男生(也就是1号男生)另外分配一个妹子。
(黄色表示这条边被临时拆掉)
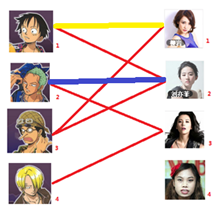
与1号男生相连的第二个女生是2号女生,但是2号女生也有主了,怎么办呢?我们再试着给2号女生的原配( )重新找个妹子(注意这个步骤和上面是一样的,这是一个递归的过程)
)重新找个妹子(注意这个步骤和上面是一样的,这是一个递归的过程)
此时发现2号男生还能找到3号女生,那么之前的问题迎刃而解了,回溯回去
2号男生可以找3号妹子~~~ 1号男生可以找2号妹子了~~~ 3号男生可以找1号妹子
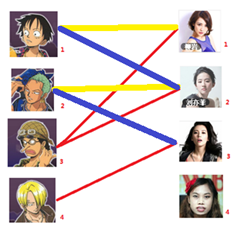
所以第三步最后的结果就是:
===============================================================================
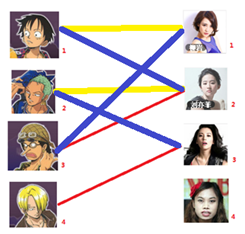
四: 接下来是4号男生,很遗憾,按照第三步的节奏我们没法给4号男生腾出来一个妹子,我们实在是无能为力了……香吉士同学走好。
===============================================================================
其原则大概是:有机会上,没机会创造机会也要上
【code】
bool find(int x){
int i,j;
for (j=1;j<=m;j++){ //扫描每个妹子
if (line[x][j]==true && used[j]==false)
//如果有暧昧并且还没有标记过(这里标记的意思是这次查找曾试图改变过该妹子的归属问题,但是没有成功,所以就不用瞎费工夫了)
{
used[j]=1;
if (girl[j]==0 || find(girl[j])) {
//名花无主或者能腾出个位置来,这里使用递归
girl[j]=x;
return true;
}
}
}
return false;
} bool find(int x){
int i,j;
for (j=1;j<=m;j++){ //扫描每个妹子
if (line[x][j]==true && used[j]==false)
//如果有暧昧并且还没有标记过(这里标记的意思是这次查找曾试图改变过该妹子的归属问题,但是没有成功,所以就不用瞎费工夫了)
{
used[j]=1;
if (girl[j]==0 || find(girl[j])) {
//名花无主或者能腾出个位置来,这里使用递归
girl[j]=x;
return true;
}
}
}
return false;
}在主程序我们这样做:每一步相当于我们上面描述的一二三四中的一步
for (i=1;i<=n;i++)
{
memset(used,0,sizeof(used)); //这个在每一步中清空
if find(i) all+=1;
} 所谓最大匹配,就是撮合最多对
完美匹配就是所有的人都不落单
我们把上图已经匹配的点叫做匹配点,没匹配的点叫未匹配点。蓝线叫做匹配边,其余叫做非匹配边
交替路:图中的一条路径,交替经过匹配边,非匹配边,则称为该路径为交替路。
增广路:从一个未匹配点出发,走交替路,如果到达另一个未匹配点,则这条交替路称为增广路。
增广路一定有奇数条边,而且非匹配边比匹配边多一条。(动手画一下很容易得知,如下图左边是一个匹配 路径5->d->1->b就是
一条增广路


for (i=1;i<=n;i++)
{
memset(used,0,sizeof(used)); //这个在每一步中清空
if find(i) all+=1;
}那么对于一个匹配,如果我们能够找到一条增广路,然后把匹配边变成非匹配边,非匹配边变成匹配边,就一定可以多出一个匹配。
于是找最大匹配的过程就变成了找增广路,当找不到增广路的时候,该匹配就是一个最大匹配。(即匈牙利算法,证明略。)
一个简单的DFS版的模板(详细注释),用vector存边。时间复杂度O(NE)
const int N = 505;
vector<int> G[N]; // vector存图
int n, m;
int match[N]; // 记录每个点匹配的对象 没匹配的为-1
bool used[N]; // 保证每一次找增广路的时候每个点仅搜索一次
bool findPath(int u)
{ // 从u点开始走交替路径 直到找到一个未匹配点
for (unsigned i = 0; i < G[u].size(); ++i) {
int v = G[u][i];
if (!used[v]) { // 和该点连接且没有被搜索过的点
used[v] = true;
// 该点是未匹配点 或者 走过一条匹配边然后能找到未匹配点
// 这里 设c=match[v] 既然c与match匹配了 那么c再走到其他任何一点经过的边都是非匹配边 也就实现了走交替路
if (match[v] == -1 || findPath(match[v])) {
// 找到一条增广路 把新匹配的点连起来
match[v] = u;
match[u] = v;
return true;
}
}
}
return false;
}
int maxMatch()
{
int ans = 0;
memset(match, -1, sizeof match);
for (int i = 0; i < n; ++i) { // 这里 二分图有两部分点 只需要搜索其中一部分就可以
memset(used, false, sizeof used);
used[i] = true;
if (findPath(i)) ++ans; // 找到一条增广路 即多了一个匹配
}
return ans;
}这里使用vector存的边,有些题解用矩阵存边G[a][b]表示X集合a点到Y集合b点的连线。a,b都是从1开始的。这里是不同的,因为用了同一个used和match来保存结果,所有的点都没有重复。
最大匹配的一些相关性质:
(1)二分图的最小顶点覆盖:用最少的点,让每条边都至少和其中一个点关联
(使这些点和所有的边都有关联,把所有的边的覆盖)
最大匹配数 = 最小点覆盖数(Konig 定理)
(2)二分图的最大独立点集:在图中选取最多的点,使任意所选两点均不相连
(在一个二分图中,选择一些顶点,使得所选择的点集中任意两个顶点之间没有边相连)
最大独立数 = 顶点数 — 最大匹配数
(3)最小路径覆盖数:对于一个 DAG(有向无环图),选取最少条路径,使得每个顶点属于且仅属于一条路径。路径长可以为 0,即单个点。(路径覆盖就是在图中找一些路经,使之覆盖了图中的所有顶点,且任何一个顶点有且只有一条路径与之关联,如果把这些路径中的每条路径从它的起始点走到它的终点, 那么恰好可以经过图中的每个顶点一次且仅一次)
最小路径覆盖数 = 顶点数 - 最大匹配数















 121
121

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









