






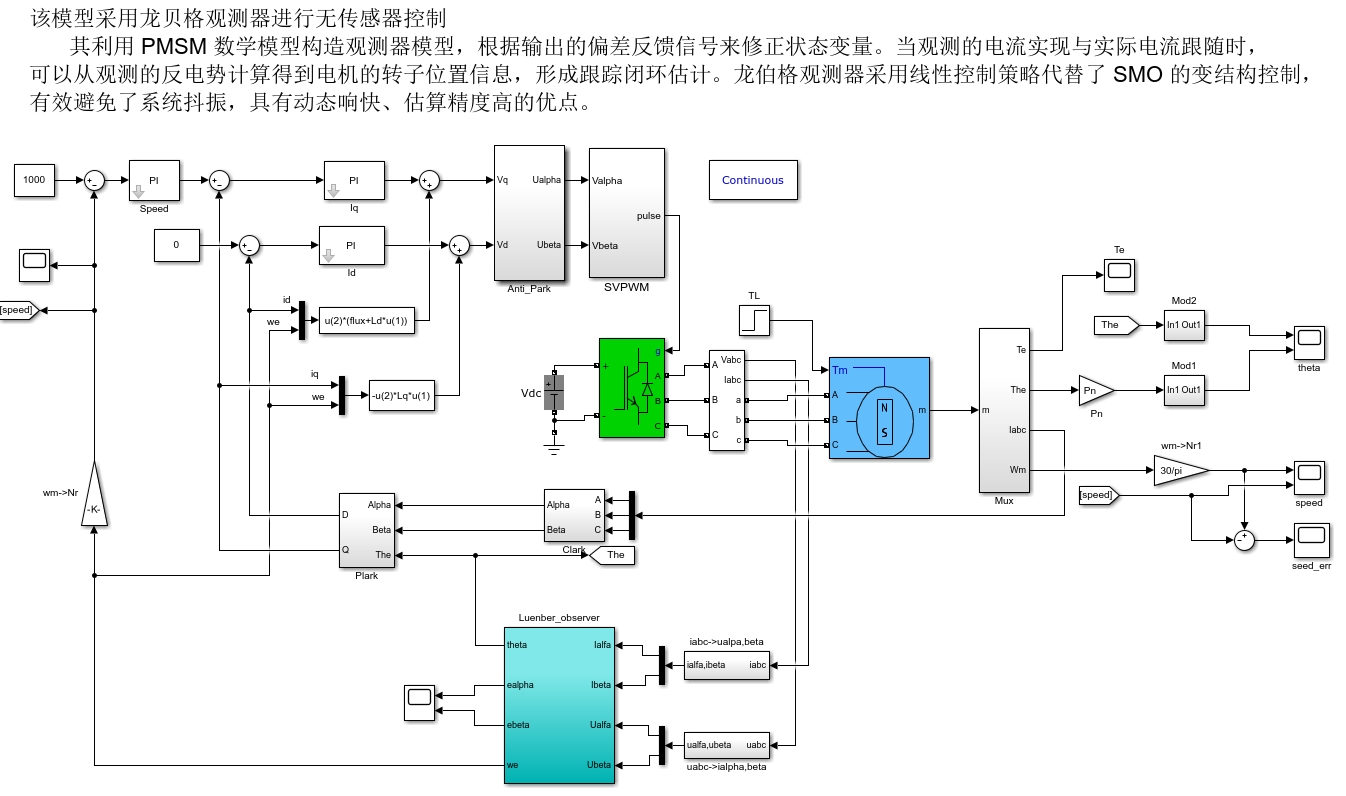
该模型采用龙贝格观测器进行无传感器控制
其利用 PMSM 数学模型构造观测器模型,根据输出的偏差反馈信号来修正状态变量。
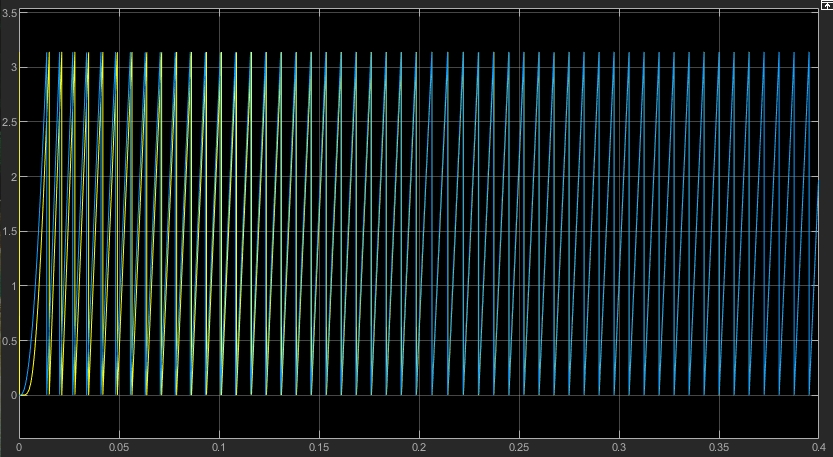
当观测的电流实现与实际电流跟随时,
可以从观测的反电势计算得到电机的转子位置信息,形成跟踪闭环估计。
龙伯格观测器采用线性控制策略代替了 SMO 的变结构控制,
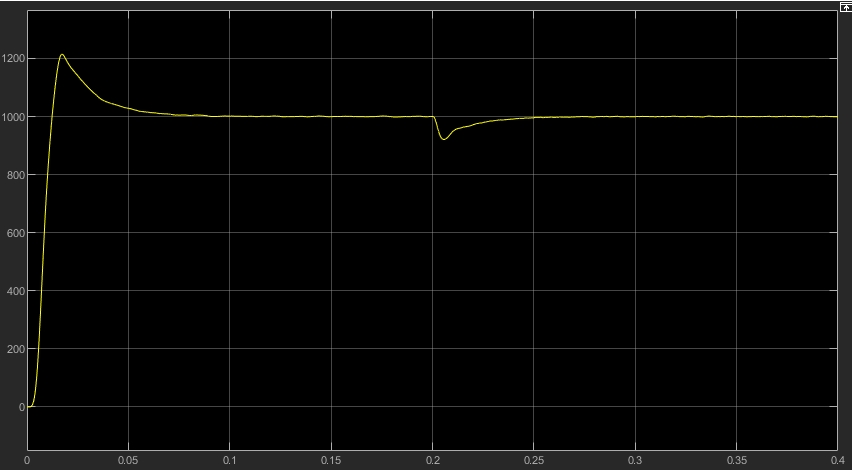
有效避免了系统抖振,具有动态响快、估算精度高的优点
YID:89168659580733053
Keepmoving
标题:基于龙贝格观测器的无传感器控制研究
摘要:本文围绕"该模型采用龙贝格观测器进行无传感器控制"展开研究,介绍了龙贝格观测器在无传感器控制中的应用。文章从PMSM数学模型构造观测器模型开始,详细阐述了龙贝格观测器的工作原理和优势。通过将观测的反电势用于计算电机转子位置信息,实现了跟踪闭环估计。相较于传统的变结构控制,龙贝格观测器具有动态响应快速、精度高等优点,并有效避免了系统抖振。
-
引言
- 介绍无传感器控制的背景和意义
- 阐述传感器在控制系统中的局限性
- 引出采用龙贝格观测器的目的和意义
-
PMSM数学模型构造观测器模型
- 简述PMSM的数学模型
- 介绍观测器的构造和工作原理
- 分析如何利用输出偏差反馈信号修正状态变量
-
龙贝格观测器原理及优势
- 介绍龙贝格观测器的基本原理
- 对比传统的变结构控制方法
- 阐述龙贝格观测器在无传感器控制中的优势,包括动态响应快速和估算精度高等方面
-
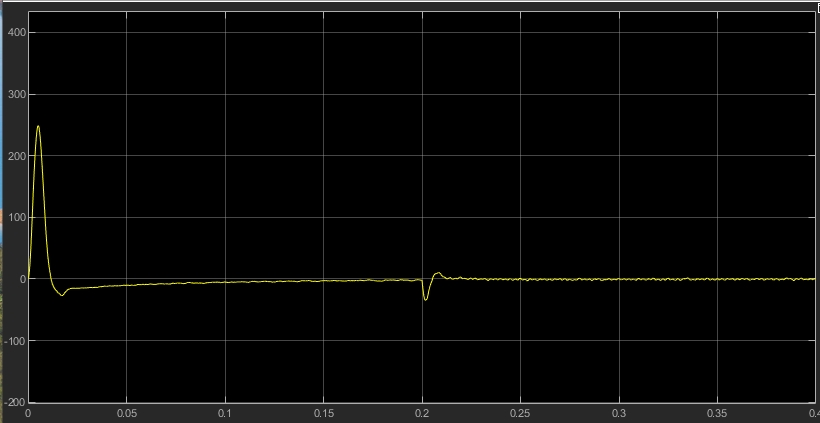
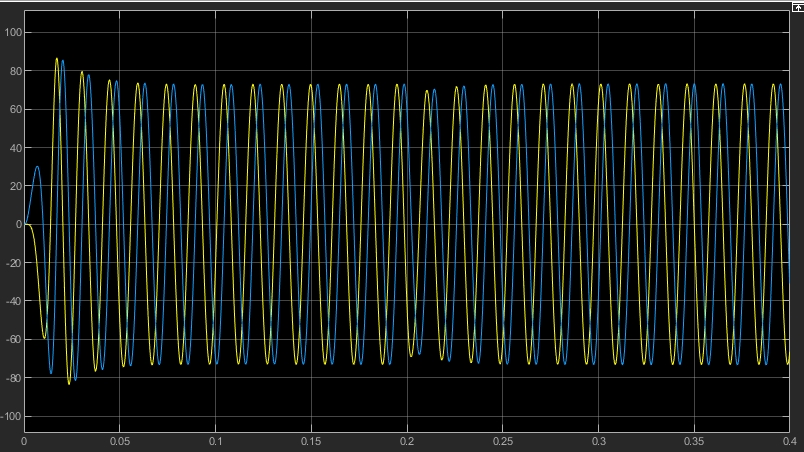
实验验证与应用案例分析
- 介绍实验平台和实验设置
- 分析实验结果,并与传统方法进行对比
- 展示龙贝格观测器在实际应用中的效果和潜在应用领域
-
总结与展望
- 总结龙贝格观测器在无传感器控制中的优势和应用前景
- 对未来研究的方向和挑战进行展望
本文所述基于龙贝格观测器的无传感器控制方法为实现精确的电机控制提供了一种新的途径。该方法不仅具有较好的实际应用前景,还在提高系统响应速度和估算精度方面具有独特优势。未来的研究可以进一步优化龙贝格观测器的设计和算法,完善无传感器控制系统的性能。
相关的代码,程序地址如下:http://coupd.cn/659580733053.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









