






项目:红外循迹避障小车模拟——基于Arduino uno的红外循迹,超声波避障,L298N驱动小车模拟
设计;proteus 仿真(版本8.9-可提供软件安装包)
主控:Arduino UNO
外设:L298N,电机,红外,超声波
程序:Arduino
ID:6519695302948584
QYQX
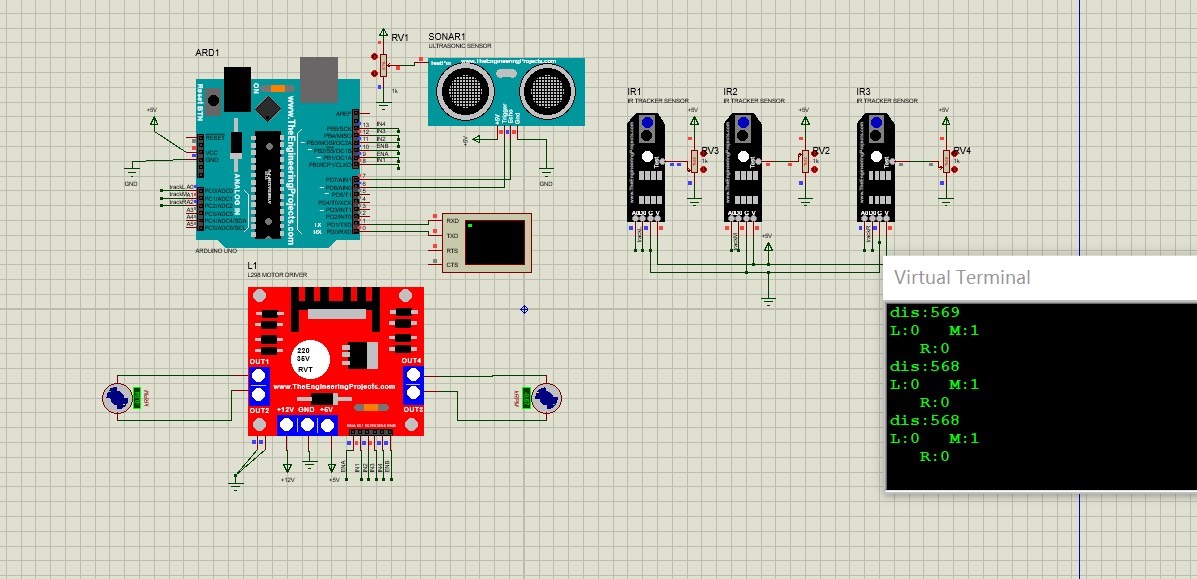
在项目:红外循迹避障小车模拟——基于Arduino uno的红外循迹,超声波避障,L298N驱动小车模拟的设计中,我们主要使用了Arduino Uno作为主控,以及L298N驱动、红外传感器和超声波传感器等外设。通过编写Arduino程序,实现了红外循迹和超声波避障的功能。
首先,我们需要了解一些基本概念和原理。Arduino Uno是一款开源的单片机开发板,基于ATmega328P芯片,具有丰富的IO口和丰富的库函数支持。L298N是一款双H桥驱动模块,能够通过控制电机的旋转方向和速度,实现小车的前进、后退、左转、右转等动作。红外传感器是一种可以检测红外线的传感器,可以用于跟踪红外线信号,实现循迹功能。超声波传感器则可以测量超声波的传播时间,通过计算距离来实现避障功能。
在实际设计中,我们首先需要制定整体的硬件连接方案。Arduino Uno的数字IO口可以通过连接线与L298N驱动模块进行连接,通过控制输入信号的高低来控制电机的旋转方向和速度。红外传感器和超声波传感器的输出信号可以分别连接到Arduino Uno的数字IO口,通过读取传感器的输出值来获取红外线信号和距离信息。
接下来,我们需要编写Arduino程序,实现红外循迹和超声波避障的功能。首先,我们需要定义一些常量和变量,以及初始化各个外设。在循迹功能中,我们可以通过读取红外传感器的输出值来判断小车当前位置,然后通过控制电机的旋转方向实现循迹。在避障功能中,我们可以通过读取超声波传感器的输出值来判断前方是否有障碍物,然后通过控制电机的旋转方向实现避障。
在程序中,我们可以使用循环结构来实现小车的持续运行。通过不断读取传感器的输出值,并根据判断结果控制电机的旋转方向,从而实现红外循迹和超声波避障的功能。同时,我们还可以添加一些延时操作,以控制小车的速度和运动稳定性。
最后,在设计完成后,我们可以使用Proteus进行仿真。Proteus是一款强大的电子电路仿真软件,可以帮助我们验证设计的正确性和稳定性。通过将Arduino程序加载到仿真环境中,并模拟传
【相关代码,程序地址】:http://fansik.cn/695302948584.html
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









