







如何写出三体的MATLAB程序-代码篇
写在前面
在上文当中我们已经对三个物体之间的受力进行了分析,也说明了在时间 t t t下的加速度、速度和位移的计算方式。
本篇中将根据上一篇的公式来写出对应的代码,并且详细说明一下如何去构建一个程序的框架。
本文所有代码均在我的Github中存有备份,可下载后直接运行,点击Github: HanpuLiang/Three-Body-by-MATLAB即可进入。
构建框架
基本变量
我们首先要确定,物体本身具有哪些物理量?
质量、加速度、速度、坐标。
其中加速度和坐标为矢量,当在计算过程当中可以将其正交分解为 x x x与 y y y轴的标量。
其余的量我们还可以设置一下,诸如:物体运动的时间长度、我们计算所需要的时间间隔、万有引力常数等。
对于我们要做出的图像大小也需要设置一下,比如说 x x x轴范围, y y y轴范围等。
程序流程
初始化
首先需要初始化,确定三个物体在初始状态的情况:初始坐标、初始速度(大小与方向)。所以一共需要三个量:坐标、速度大小、速度相对 x x x轴角度。
物体的加速度可以直接由万有引力公式计算出来,为了计算方便,需要将其正交分解与叠加。
随着时间演变
物体开始运动了,但是因为我们无法给出一段连续的时间,只能计算在极小的时间间隔 Δ t \Delta t Δt之后物体所在的位置。
所以在 t → t + D e l t a t t\to t+Delta t t→t+Deltat时间,首先计算出当前位置的加速度,然后根据这个加速度算出当前的速度,再根据这个速度算出经历过 Δ t \Delta t Δt时间后的位移变化量,再将这个位移变化量叠加到 t t t的位置上。
这样子就完成了一个循环。
可以将其写成一个流程图
作图
之前按道理,我们应该将每一个时间点的值放在一个矩阵内,这样子我们就可以得到随之间变化的所有物理量。
这样子我们就可以直接做出随着时间变化的各个物理量的图,如 t − v t-v t−v和 t − a t-a t−a以及 t − θ t-\theta t−θ等。
如果我们想要做出小球的运动图,那就需要 t t t时刻及其之前(做出尾迹)的数据进行作图。
实际代码
基本变量-代码
首先是初始化
%% 初始条件
% 初始条件为以圆心为(0, 0)半径r的圆上有三个等质量的点
r = 10;
% 坐标(等边三角形)
pos0 = [0, r; r/2*sqrt(3), -r/2; -r/2*sqrt(3), -r/2];
% 速度大小
v0 = [6, 6, 6];
% 速度方向(x轴正方向为参考)
theta0 = [0, 4*pi/3, 2*pi/3];
%% 参数设置
global G dt m x_min x_max y_min y_max time_end isOutVideo;
% 结束时间
time_end = 2;
% 时间间隔
dt = 0.05;
% 万有引力系数,随便设置的
G = 1;
% 质量
m = [1000, 1000, 1000];
% 小球个数
N = length(v0);
% 图像边界
x_min = -25;
x_max = -x_min;
y_min = x_min;
y_max = -y_min;
% 是否输出视频图像
isOutVideo = true;
初始化-代码
然后是将我们的初始值放入矩阵中,因为我们初始值设定的是角度与速度大小,所以首先要把 v v v给分解为 x y xy xy轴上的。
%% 初始设置
time = 0:dt:time_end;
% 坐标
pos = zeros(N, 2, length(time));
pos(:,:,1) = pos0;
% 速度
vx = zeros(length(time), N);
vx(1,:) = v0.*cos(theta0);
vy = zeros(length(time), N);
vy(1,:) = v0.*sin(theta0);
% 加速度大小
a = zeros(length(time), N);
迭代开始
迭代的话这一步其实就和我们的逻辑很像了,不过之所以主代码这么简介,是因为我把一大堆复杂的内容全部放到了函数里面,只留个接口调用,这样子可以让主代码更加简洁明了。
%% 迭代开始
for t = 2:length(time)
% 得到分加速度
da = calAcceleration(pos(:,:,t-1));
% 计算速度
[vx(t,:), vy(t,:)] = calVelocity(vx(t-1,:), vy(t-1,:), da);
% 计算位移
pos(:,:,t) = calDisplacement(vx(t-1:t,:), vy(t-1:t,:), pos(:,:,t-1));
end
对于计算加速度的函数,主要的原理还是和上一篇讲的一样,通过万有引力公式求解,然后正交分解并叠加。
% 计算x与y轴加速度变化量da(3x2)
function da = calAcceleration(pos)
global m;
% 小球数量
[n, ~] = size(pos);
da = zeros(n, 2);
for i = 1:n
dax = 0;
day = 0;
for j = 1:n
if i ~= j
% i小球和j小球相对角度与距离
[theta, r] = calRelatively(pos(i,:), pos(j,:));
% 两个小球的引力大小
F = calGravitation(r, i, j);
% 第i个小球收到来自j的加速度分量
dax = dax + F/m(i)*cos(theta);
day = day + F/m(i)*sin(theta);
end
end
da(i,:) = [dax, day];
end
end
% 计算两个小球的相对角度与距离
function [theta, r] = calRelatively(pos1, pos2)
dx = pos2(1) - pos1(1);
dy = pos2(2) - pos1(2);
r = sqrt(dx^2 + dy^2);
theta = acos(dx/r);
% 因为cos值的两个象限需要区分,所以这里要变换
if dy < 0 && dx >0
theta = -theta;
end
if dx < 0 && dy < 0
theta = (pi-theta)+pi;
end
end
% 计算两个小球引力大小
function F = calGravitation(r, i, j)
global m G;
F = G*m(i)*m(j)/r^2;
end
计算速度的函数,这个就很简单了,简单的速度与加速度公式。
% 计算小球的速度变化
function [vx, vy] = calVelocity(vx_p, vy_p, da)
global dt;
vx = vx_p + dt*da(:,1)';
vy = vy_p + dt*da(:,2)';
end
计算当前坐标,方法同公式。
% 计算小球的位移变化
function pos = calDisplacement(vx, vy, pos_p)
global dt;
vx = vx';
vy = vy';
% 计算下一时刻的坐标
pos(:,1) = pos_p(:,1) + (vx(:,1)+vx(:,2))/2*dt;
pos(:,2) = pos_p(:,2) + (vy(:,1)+vy(:,2))/2*dt;
end
作图-代码
作图的话就没有这么简单了,因为还需要设置一大堆比较麻烦的图像参数。
对于做轨迹图,可以通过以下代码实现
% 做轨迹图像
plotPosition(pos, vx, vy, time)
% 做运动图像并保存视频
function plotPosition(pos, vx, vy, time)
global isOutVideo;
figure(1)
if isOutVideo == true
% 创建视频句柄,视频名称three_body.avi
writerObj = VideoWriter('three_body.avi');
open(writerObj);
myMovie(1:length(time)) = struct('cdata', [], 'colormap', []);
end
% 迭代计算得到图像
for t = 1:length(time)
plotPosVec(pos(:,:,t), vx(t,:), vy(t,:), t, pos)
if isOutVideo == true
frame = getframe;
% 修改帧参数
frame.cdata = imresize(frame.cdata, [685, 685]);
writeVideo(writerObj, frame);
end
end
% 关闭视频句柄
if isOutVideo == true
close(writerObj);
end
end
% 作图位置+速度矢量
function plotPosVec(pos, vx, vy, t, pos_all)
% 小球
global x_min x_max y_min y_max;
figure(1)
scatter(pos(:,1), pos(:,2), 'ok', 'filled')
% 图像细节调整
axis equal
box on
grid on
set(gca, 'linewidth', 1.5, 'xtick', floor(linspace(x_min, x_max, 11)), 'ytick', floor(linspace(y_min, y_max, 11)))
hold on
% 三条速度线
for i = 1:length(vx)
line([pos(i,1) pos(i,1)+vx(i)/2], [pos(i,2), pos(i,2)+vy(i)/2], 'linewidth', 1.2)
end
% 添加轨道线
plotCurrentTrace(pos_all, t)
% 添加文本
text(x_max*13/25, y_min*20/25, 'Made By Liang Hanpu', 'horiz', 'center', 'color', 'r')
axis([x_min x_max y_min y_max])
hold off
end
% 输出轨迹线
function plotCurrentTrace(pos, t)
global x_min x_max y_min y_max;
if t ~= 0
[a, ~, ~] = size(pos);
hold on
axis equal
box on
grid on
set(gca, 'linewidth', 1.5)
axis([x_min x_max y_min y_max])
for i = 1:a
x = zeros(1, t);
y = zeros(1, t);
for j = 1:t
x(j) = pos(i, 1, j);
y(j) = pos(i, 2, j);
end
plot(x, y, 'linewidth', 1.5)
end
end
end
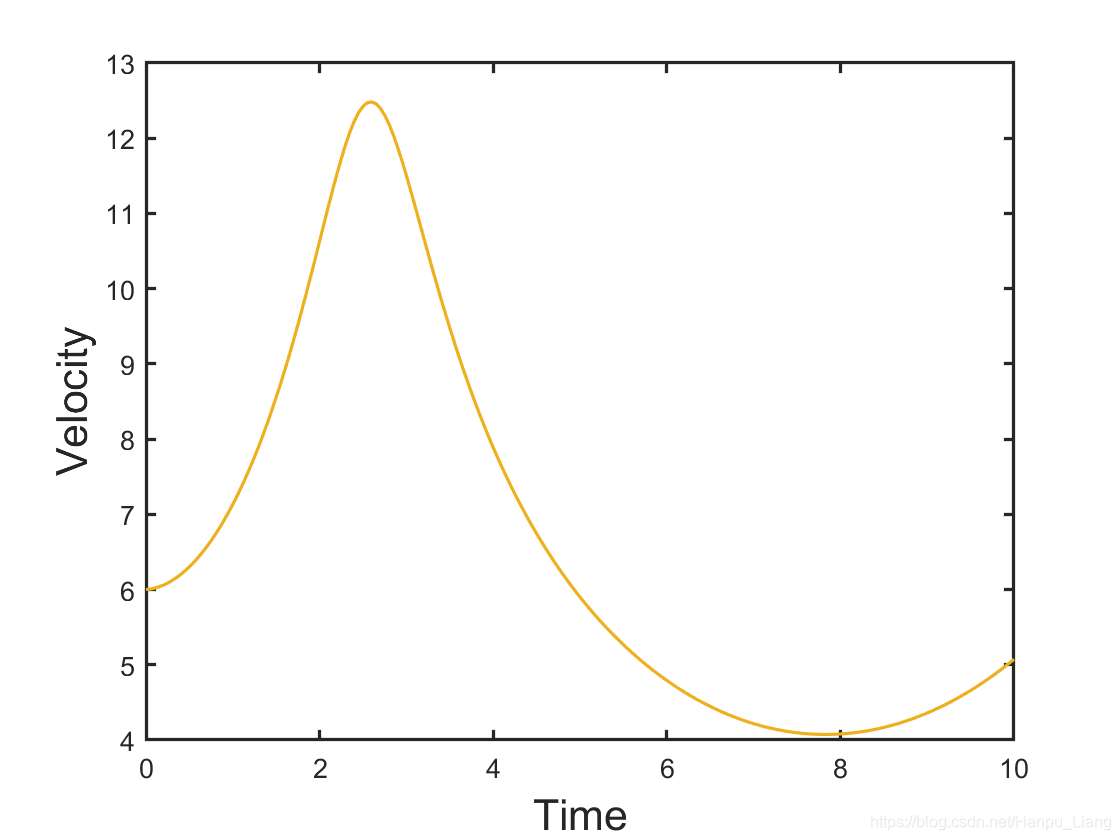
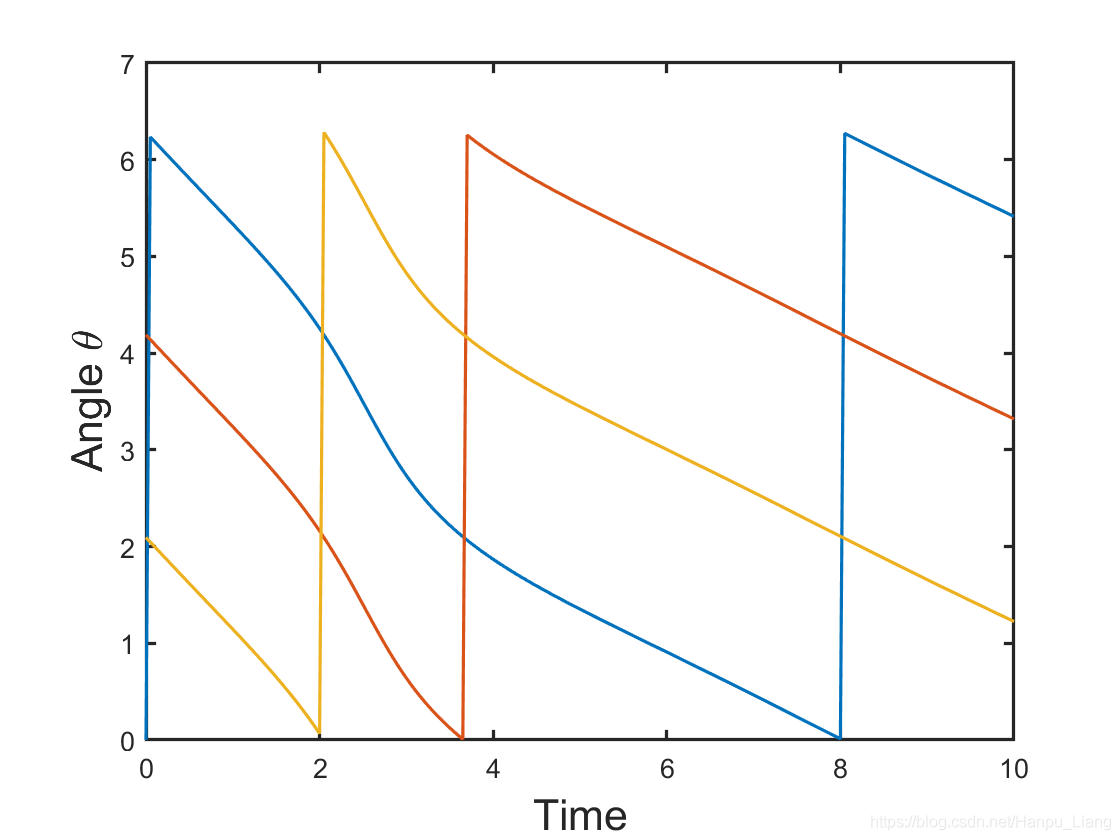
对于做时间随速度大小与角度的图像,可以由以下函数实现,这个就比较简单了。
% 做速度随时间图像
plotVelocity(vx, vy)
% 输出三个小球速度变化图与角度变化图
function plotVelocity(vx, vy)
global dt time_end;
% 速度
v = sqrt(vx.^2 + vy.^2);
t = (0:dt:time_end)'*ones(1,3);
% 角度
theta = acos(vx./v);
theta(vx>0&vy<0) = 2*pi-theta(vx>0&vy<0);
theta(vx<0&vy<0) = (pi-theta(vx<0&vy<0))+pi;
figure
plot(t, v, 'linewidth', 1.2)
box on
xlabel('Time', 'fontsize', 16)
ylabel('Velocity' , 'fontsize', 16)
set(gca, 'linewidth', 1.2)
figure
plot(t,theta, 'linewidth', 1.2)
xlabel('Time', 'fontsize', 16)
ylabel('Angle \theta' , 'fontsize', 16)
set(gca, 'linewidth', 1.2)
end
做出来的图的趋势还是比较有趣的
最后
以上就是全部内容,我将会全部放在我的Github中,地址在文章开头有。
如果你学到了一些东西的话,麻烦点个赞,加个收藏来个关注噢。














 757
757











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









