







文章目录
前言
参考于《托马斯微积分》第10版
一、数量场与第一类曲线积分
1. 数量场
数量场是数学中描述空间中不同点上的物理量的概念。
数量场:数量场是指在空间中的每个点上都有一个标量(即大小)与之对应的场。比如温度场、密度场等。数量场只包含一个数值,没有方向性。
数量场通常使用一个标量函数来表示,这个函数在空间中的每个点上都有一个数值与之对应。数学上,如果我们考虑三维空间中的数量场,可以用一个函数 f ( x , y , z ) f(x,y,z) f(x,y,z) 来表示,其中 x , y , z x,y,z x,y,z 分别是空间中的坐标。这个函数返回一个实数,表示该点上的数量场数值。
2. 理解
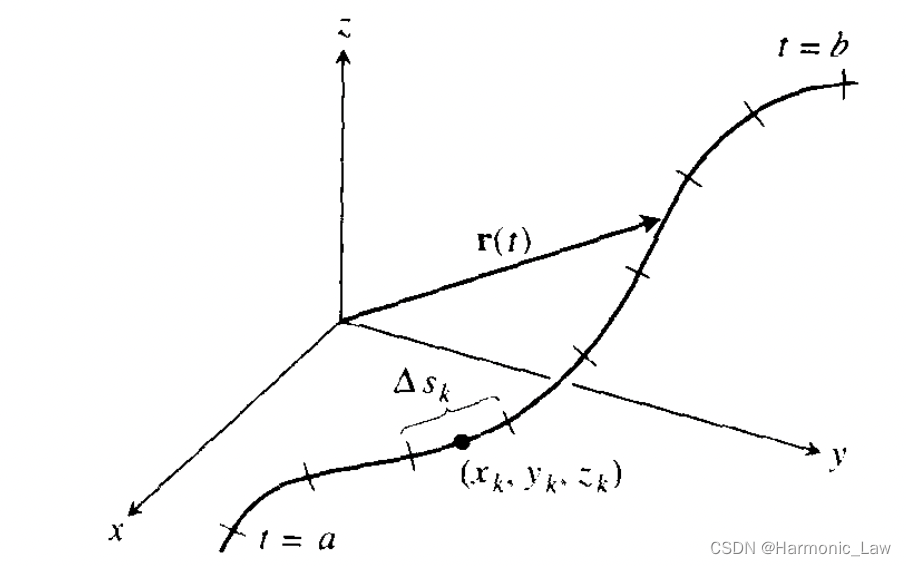
当空间中一曲线 r ( t ) = g ( t ) i + h ( t ) j + k ( t ) k r(t)=g(t)i+h(t)j+k(t)k r(t)=g(t)i+h(t)j+k(t)k , a ≤ t ≤ b a≤t≤b a≤t≤b 在空间中通过数量场函数 f ( x , y , z ) f(x,y,z) f(x,y,z) 的定义域,则f沿曲线的值就可以用复合函数 f ( g ( t ) , h ( t ) , k ( t ) ) f(g(t),h(t),k(t)) f(g(t),h(t),k(t)) 表示。
若关于曲线弧长从a到b对此复合函数积分,就是沿曲线对f作线积分。抛开三维空间的几何理论,实际上线积分就是一个【实值函数】在实轴一个区间上的一般定积分。
用来描述沿着曲线的某种标量场的累积效应
3. 定义
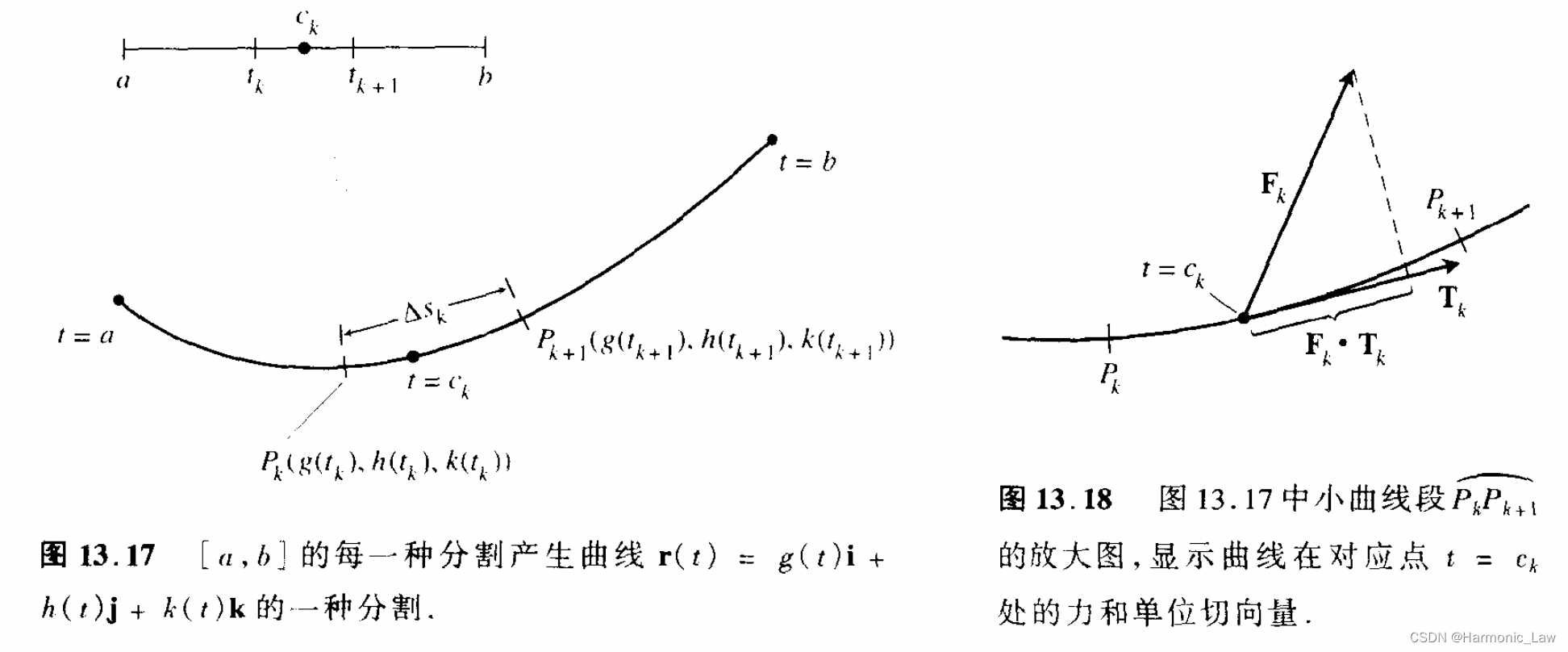
设 f ( x , y , z ) f(x,y,z) f(x,y,z) 为一【实值函数】 ,其定义域包含曲线 r ( t ) = g ( t ) i + h ( t ) j + k ( t ) k , a ≤ t ≤ b r(t)=g(t)i+h(t)j+k(t)k, a≤t≤b r(t)=g(t)i+h(t)j+k(t)k,a≤t≤b。将曲线分割成有限弧段。
设典型小弧段长度为
△
s
x
△s_x
△sx.在每个小弧段上取点
(
x
k
,
y
k
,
z
k
)
(x_k,y_k,z_k)
(xk,yk,zk),并做和:
S
n
=
∑
k
=
1
n
f
(
x
k
,
y
k
,
z
k
)
Δ
S
k
\begin{aligned} S_n=\sum_{k=1}^{n}f(x_k,y_k,z_k)\Delta S_k \end{aligned}
Sn=k=1∑nf(xk,yk,zk)ΔSk
如果 f f f 连续, g , h g,h g,h 和 k k k均有一阶连续导数,那么此和当n增加且小段弧长 △ s △s △s 趋于零时有极限。此极限值为f在曲线上从a到b的线积分.
若以一个字母C代表曲线,则线积分可记为
S
=
∫
C
f
(
x
,
y
,
z
)
d
s
\begin{aligned} S=\int_{C}^{}f(x,y,z)ds \end{aligned}
S=∫Cf(x,y,z)ds
- 当曲线 s ( t ) s(t) s(t) 位于二维平面时, f ( x , y ) f(x,y) f(x,y) 可看做过该曲线的【柱曲面的高】,该线积分可看该【曲面的面积】
- 当曲线 s ( t ) s(t) s(t) 位于三维空间时, f ( x , y , z ) f(x,y,z) f(x,y,z) 可看做该曲线的【曲线密度】,该积分可看做该曲线的【曲线质量】
4. 光滑曲线的线积分计算
要在曲线C上对连续函数 f ( x , y , z ) f(x,y,z) f(x,y,z) 积分,其中 f ( x , y , z ) f(x,y,z) f(x,y,z)在曲线C上有定义且连续
- 找出曲线C的光滑参数式表达式,其中
g
(
t
)
,
h
(
t
)
,
h
(
t
)
g(t),h(t),h(t)
g(t),h(t),h(t)在
[
a
,
b
]
[a,b]
[a,b]区间内有一阶连续偏导数
r ( t ) = g ( t ) i + h ( t ) j + h ( t ) k a ≤ t ≤ b \begin{aligned} r(t)=g(t)i+h(t)j+h(t)k\quad a≤t≤b \end{aligned} r(t)=g(t)i+h(t)j+h(t)ka≤t≤b - 计算积分
∫ C f ( x , y , z ) d s = ∫ a b f ( g ( t ) , h ( t ) , k ( t ) ) ∣ d r d t ∣ d t = ∫ a b f ( g ( t ) , h ( t ) , k ( t ) ) [ g ′ ( t ) ] 2 + [ h ′ ( t ) ] 2 + [ k ′ ( t ) ] 2 d t \begin{aligned} \int_{C}f(x,y,z)ds =\int_{a}^{b}f(g(t),h(t),k(t) )|\frac{dr}{dt}| dt = \int_{a}^{b}f(g(t),h(t),k(t)) \sqrt{[g'(t)]^2+[h'(t)]^2+[k'(t)]^2} dt \end{aligned} ∫Cf(x,y,z)ds=∫abf(g(t),h(t),k(t))∣dtdr∣dt=∫abf(g(t),h(t),k(t))[g′(t)]2+[h′(t)]2+[k′(t)]2dt
注意:
- 定积分的下限 a a a一点小于上限 b b b;
- f ( x , y , z ) f(x,y,z) f(x,y,z)中的 x , y , z x,y,z x,y,z不是独立的,而是相互有关的(因为它们都经过了曲线C)
注:无论曲线C的方程是以显示还是隐式给出的,始终可以化做参数方程
注:设 T ⃗ 为曲线 C 的切线方向的单位向量: \vec{T}为曲线C的切线方向的单位向量: T为曲线C的切线方向的单位向量: d r = T ⃗ d s dr=\vec{T} ds dr=Tds
注:弧长公式 d s = ∣ d r ⃗ d t ∣ d t ds=|\frac{ \vec{dr} }{dt}|dt ds=∣dtdr∣dt
5. 性质
- 求曲线长度
- 可积函数必有界
- 积分的线性性质
- 积分的可加性
- 积分的保号性
- 估值定理
- 中值定理
- 普通对称性
- 轮换对称性
6. 应用
- 计算曲线长度
- 计算曲线重心
- 形心公式的逆应用
二、向量场与第二类曲线积分
1. 向量场
数量场和向量场都是数学中描述空间中不同点上的物理量的概念。
向量场:向量场是指在空间中的每个点上都有一个向量与之对应的场。向量场描述了在空间中不同位置处矢量的情况,例如速度场、力场等。向量场包含大小和方向两个要素。
对于三维空间中的向量场,通常使用一个矢量值函数来表示,用一个函数 F ( x , y , z ) = ⟨ P ( x , y , z ) , Q ( x , y , z ) , R ( x , y , z ) ⟩ \mathbf{F}(x, y, z) = \langle P(x, y, z), Q(x, y, z), R(x, y, z) \rangle F(x,y,z)=⟨P(x,y,z),Q(x,y,z),R(x,y,z)⟩ 来表示,其中 P , Q , R P, Q, R P,Q,R 是分别描述 x 、 y 、 z x、y、z x、y、z 方向上的分量函数。这个函数在空间中的每个点上返回一个向量,来表示每个点处的方向和数值。
用来描述沿着曲线的向量场的累积效应
三维向量场也可以用以下式子表示:
F
(
x
,
y
,
z
)
=
M
(
x
,
y
,
z
)
i
+
N
(
x
,
y
,
z
)
j
+
P
(
x
,
y
,
z
)
k
\begin{aligned} F(x,y,z)=M(x,y,z)i+N(x,y,z)j+P(x,y,z)k \end{aligned}
F(x,y,z)=M(x,y,z)i+N(x,y,z)j+P(x,y,z)k若各分量函数M,N,P是连续的,则这个场就是连续的,且如果M,N和P是可微的,则场就是可微场
数量场与向量场区别
- 内容不同:数量场描述每个点上的标量值,向量场描述每个点上的向量值。
- 性质不同:数量场只有大小,没有方向;而向量场有大小和方向。
- 表示形式不同:数量场用一个实数表示,向量场用一个有大小和方向的矢量表示。
2. 理解(空间中力沿曲线做的功)
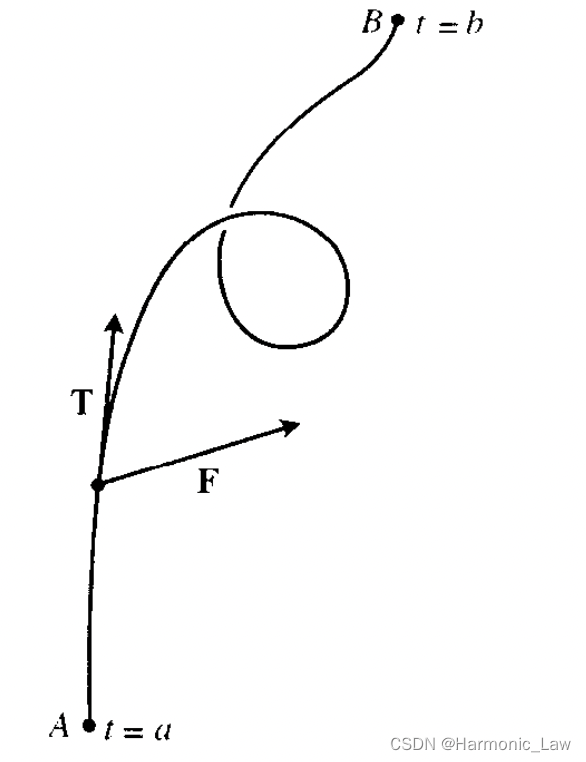
设向量场 F = M ( x , y , z ) i + N ( x , y , z ) j + P ( x , y , z ) k F=M(x,y,z)i+N(x,y,z)j+P(x,y,z)k F=M(x,y,z)i+N(x,y,z)j+P(x,y,z)k 代表空间某一区域上分布的力(可以是重力或某种电磁力)
又 r ( t ) = g ( t ) i + h ( t ) j + k ( t ) k , a ≤ t ≤ b r(t)=g(t)i+h(t)j+k(t)k,a≤t≤b r(t)=g(t)i+h(t)j+k(t)k,a≤t≤b 为该区域内一光滑曲线
由于第二类曲线积分本质是计算空间中力沿曲线做功,那么就需要知道做功的方向,当力 F F F与做功方向相同时做[正功,]当力 F F F与做功方向相反时做[负功]
假设【 T T T向量】为空间曲线 r ( t ) r(t) r(t)的单位向量,其方向定义为从空间曲线 r ( t ) r(t) r(t)的起点到终点的方向的切线方向
假设【 T 0 T_0 T0向量】表示空间曲线 r ( t ) r(t) r(t)的单位方向向量,其方向与 ( g ′ ( t ) , h ′ ( t ) , k ′ ( t ) ) (g'(t),h'(t),k'(t)) (g′(t),h′(t),k′(t))相同
由于参数方程的性质,我们求出的这个 T 0 ⃗ \vec{T_0} T0 向量的方向一定是【参数t增大时曲线方向的切向量方向!!!】[函数值增加最快的方向]
关于这一点我会在借下来的博文中详细介绍切向量与法向量的求法以及其方向
T ⃗ d s = d r ⃗ T 0 ⃗ d s = d r ⃗ \begin{aligned} \vec{T}ds=\vec{dr}\\ \vec{T_0}ds=\vec{dr} \end{aligned} Tds=drT0ds=dr
二者关系为:
- 设起点
a
a
a对应的参数
t
a
t_a
ta小于终点
b
b
b对应的参数
t
b
t_b
tb,则:
T ⃗ = T 0 ⃗ \begin{aligned} \vec{T}=\vec{T_0} \end{aligned} T=T0 - 设起点
a
a
a对应的参数
t
a
t_a
ta小于终点
b
b
b对应的参数
t
b
t_b
tb,则:
T ⃗ = − T 0 ⃗ \begin{aligned} \vec{T}=\vec{-T_0} \end{aligned} T=−T0
因此定义 T T T的方向为【曲线上某点从起点到终点】的切向量方向;定义 T 0 T_0 T0的方向为【参数t增大到方向】上曲线的切向量方向;
3. 定义
若让 F k F_k Fk 代表曲线上对应 t = c k t=c_k t=ck 点的F的值, T T T 代表曲线在该点从起点到终点曲线方向上的单位切向量,则 F ⋅ T F·T F⋅T 就是 F F F 在 t = c k t=c_k t=ck 处 T T T 方向上的数值分量,力F沿曲线段PP所做的功近似为:
( 在位移方向上力的分量 ) × ( 所经过的距离 ) = F k ⃗ ⋅ T ⃗ △ s k = F k ⃗ ⋅ T 0 ⃗ △ s k \begin{aligned} (在位移方向上力的分量)×(所经过的距离)=\vec{F_k}·\vec{T}△s_k=\vec{F_k}·\vec{T_0}△s_k \end{aligned} (在位移方向上力的分量)×(所经过的距离)=Fk⋅T△sk=Fk⋅T0△sk
(1)设a<b,从a向b方向进行积分,即T向量的方向与积分方向相同时,即 T ⃗ = T 0 ⃗ \vec{T}=\vec{T_0} T=T0
于是,力F在该路径所作的功近似为
∑
k
=
1
n
F
k
⃗
⋅
T
0
k
⃗
Δ
s
k
.
\begin{aligned} \sum_{k=1}^n\vec{F_k}·\vec{T_{0k}}\Delta{s_k}. \end{aligned}
k=1∑nFk⋅T0kΔsk.
此时
F
k
⃗
⋅
T
k
⃗
\vec{F_k}·\vec{T_k}
Fk⋅Tk 可以看做经过该曲线位置的【数量场】的值,由第一类曲线积分的定义:随着细分区间[a,b]后小区间的长度趋于零,相应得出的曲线段的模也趋于零,且“和式”就趋于线积分(极限)
∫
C
F
⃗
⋅
T
0
⃗
d
s
\begin{aligned} \int_{C}\vec{F}\cdot \vec{T_0}ds \end{aligned}
∫CF⋅T0ds
(2)设a<b,当从b到a的方向进行积分时,即T向量的方向与积分方向相反时,即 T ⃗ = − T 0 ⃗ \vec{T}=-\vec{T_0} T=−T0
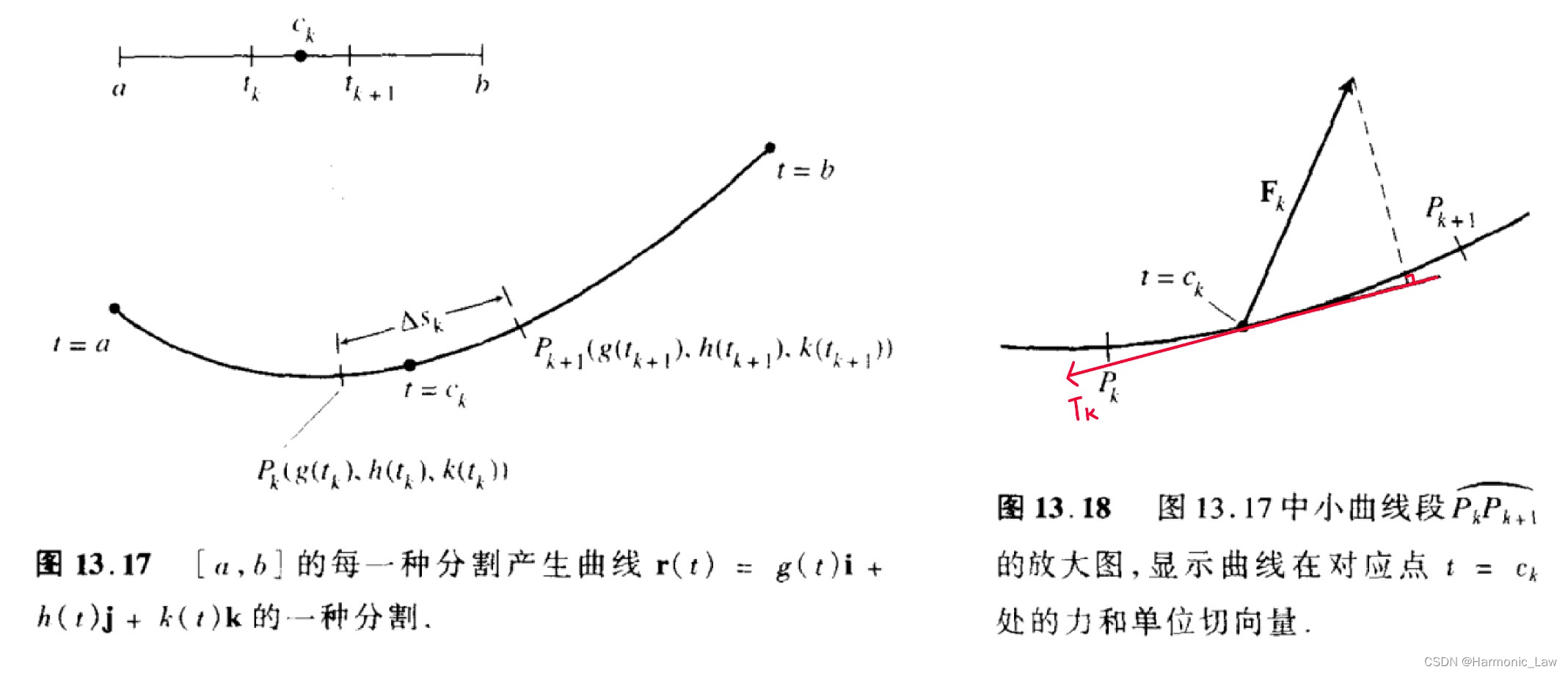
力F沿曲线段PP所做的功近似为:
(
在位移方向上力的分量
)
×
(
所经过的距离
)
=
F
k
⃗
⋅
T
⃗
△
s
k
=
F
k
⃗
⋅
(
−
T
0
⃗
)
△
s
k
\begin{aligned} (在位移方向上力的分量)×(所经过的距离)=\vec{F_k}·\vec{T}△s_k=\vec{F_k}·(-\vec{T_0})△s_k \end{aligned}
(在位移方向上力的分量)×(所经过的距离)=Fk⋅T△sk=Fk⋅(−T0)△sk
于是,力F在该路径所作的功近似为(其中
Δ
s
k
\Delta s_k
Δsk为所走路程,始终为正值)
∑
k
=
1
n
F
k
⃗
⋅
(
−
T
0
k
⃗
)
Δ
s
k
.
\begin{aligned} \sum_{k=1}^n\vec{F_k}·(-\vec{T_{0k}})\Delta{s_k}. \end{aligned}
k=1∑nFk⋅(−T0k)Δsk.
此时
F
k
⃗
⋅
(
−
T
k
⃗
)
\vec{F_k}·(-\vec{T_k})
Fk⋅(−Tk) 可以看做经过该曲线位置的【数量场】的值,由第一类曲线积分的定义:随着细分区间[a,b]后小区间的长度趋于零,相应得出的曲线段的模也趋于零,且“和式”就趋于线积分
∫
C
F
⃗
⋅
(
−
T
0
⃗
)
d
s
\begin{aligned} \int_{C}\vec{F}\cdot (-\vec{T_0})ds \end{aligned}
∫CF⋅(−T0)ds
由第一类曲线积分的计算方法可知:要在曲线C上对连续函数 f ( x , y , z ) f(x,y,z) f(x,y,z) 积分:
- 找出曲线C的光滑参数式表达式
r ( t ) = g ( t ) i + h ( t ) j + h ( t ) k a ≤ t ≤ b \begin{aligned} r(t)=g(t)i+h(t)j+h(t)k\quad a≤t≤b \end{aligned} r(t)=g(t)i+h(t)j+h(t)ka≤t≤b- 计算积分
∫ C f ( x , y , z ) d s = ∫ a b f ( g ( t ) , h ( t ) , k ( t ) ) ∣ d r d t ∣ d t = ∫ a b f ( g ( t ) , h ( t ) , k ( t ) ) [ g ′ ( t ) ] 2 + [ h ′ ( t ) ] 2 + [ k ′ ( t ) ] 2 d t \begin{aligned} \int_{C}f(x,y,z)ds =\int_{a}^{b}f(g(t),h(t),k(t) )|\frac{dr}{dt}| dt = \int_{a}^{b}f(g(t),h(t),k(t)) \sqrt{[g'(t)]^2+[h'(t)]^2+[k'(t)]^2} dt \end{aligned} ∫Cf(x,y,z)ds=∫abf(g(t),h(t),k(t))∣dtdr∣dt=∫abf(g(t),h(t),k(t))[g′(t)]2+[h′(t)]2+[k′(t)]2dt
- 当起点a小于终点b时:
∫ C F ⃗ ⋅ T ⃗ d s = ∫ C F ⃗ ⋅ T 0 ⃗ d s = ∫ a b F ⃗ T 0 ⃗ ⋅ d s d t d t = ∫ a b F ⃗ T 0 ⃗ ⋅ ∣ d r ⃗ d t ∣ d t = = = FT = f ∫ a b f ⋅ ∣ d r ⃗ d t ∣ d t \begin{aligned} \int_{C}\vec{F}\cdot \vec{T}ds=\int_{C}\vec{F}\cdot \vec{T_0}ds = \int_{a}^{b}\vec{F}\vec{T_0}\cdot\frac{ds}{dt}dt=\int_{a}^{b}\vec{F}\vec{T_0}\cdot|\frac{\vec{dr}}{dt}|dt\;\;\overset{\text{FT = f}}{===}\;\;\int_{a}^{b}f\cdot|\frac{\vec{dr}}{dt}|dt \end{aligned} ∫CF⋅Tds=∫CF⋅T0ds=∫abFT0⋅dtdsdt=∫abFT0⋅∣dtdr∣dt===FT = f∫abf⋅∣dtdr∣dt - 当起点b大于终点a时:
∫ C F ⃗ ⋅ T ⃗ d s = ∫ C F ⃗ ⋅ ( − T 0 ⃗ ) d s = − ∫ a b F ⃗ T 0 ⃗ ⋅ d s d t d t = ∫ b a F ⃗ T 0 ⃗ ⋅ ∣ d r ⃗ d t ∣ d t = = = FT = f ∫ b a f ⋅ ∣ d r ⃗ d t ∣ d t \begin{aligned} \int_{C}\vec{F}\cdot \vec{T}ds=\int_{C}\vec{F}\cdot (-\vec{T_0})ds = -\int_{a}^{b}\vec{F} \vec{T_0}\cdot\frac{ds}{dt}dt=\int_{b}^{a}\vec{F}\vec{T_0}\cdot|\frac{\vec{dr}}{dt}|dt\;\;\overset{\text{FT = f}}{===}\;\;\int_{b}^{a}f\cdot|\frac{\vec{dr}}{dt}|dt \end{aligned} ∫CF⋅Tds=∫CF⋅(−T0)ds=−∫abFT0⋅dtdsdt=∫baFT0⋅∣dtdr∣dt===FT = f∫baf⋅∣dtdr∣dt
总结:可以看出此时计算方式与第一类曲线积分相同,但是起点与终点对应参数大小值不同时,上下限也不同;因此把第二类曲线积分的上下限规定为在被积分函数不变的情况下从起点到终点!!!
用功的不同表示方法
注: x = g ( t ) , y = h ( t ) , z = k ( t ) x=g(t), y=h(t),z=k(t) x=g(t),y=h(t),z=k(t)
- 第二类曲线积分存在条件: 当 M ( x , y , z ) , N ( x , y , z ) , P ( x , y , z ) M(x,y,z),N(x,y,z),P(x,y,z) M(x,y,z),N(x,y,z),P(x,y,z)在曲线C上连续,且 g ( t ) , h ( t ) , k ( t ) g(t),h(t),k(t) g(t),h(t),k(t)有一阶连续偏导数
虽然其定义式与第一类曲线积分十分相似,但是二者并不相同,因为第二类曲线积分始终是从起点到终点,而不是第一类曲线积分的从小到大
4. 第一类与第二类曲线积分区别与联系
(1)区别
- 第一类曲线积分:通常用来描述沿着曲线的某种标量场的累积效应,比如曲线上的密度、温度等。第一类曲线积分在物理学中具有重要的应用,可以用来求解沿曲线的总质量、总温度等问题。由于标量场沿曲线的积分只关注其大小,与路径的方向无关,因此在表示上常常使用弧长参数化形式,并且积分的上下限通常表示参数变化范围,而不代表起点和终点。这是因为起点和终点之间不会影响积分结果,重要的是曲线上各点处标量场的大小。
- 第二类曲线积分:则用来描述沿着曲线的向量场的累积效应,比如力场做功的情况。在第二类曲线积分中,路径的方向非常重要,因为向量场与曲线的相对方向决定了积分值的正负,即积分值依赖于路径方向。为了明确指定路径的方向,第二类曲线积分通常需要明确指定曲线的起点和终点。因此,第二类曲线积分的上下限通常表示曲线的参数范围,并代表了起点和终点之间的积分路径。
(2)联系
设场函数为:
F
(
x
,
y
)
=
M
(
x
,
y
)
i
+
N
(
x
,
y
)
j
\begin{aligned} F(x,y)=M(x,y)i+N(x,y)j \end{aligned}
F(x,y)=M(x,y)i+N(x,y)j设有向平面曲线L为:
r
(
t
)
=
g
(
t
)
i
+
h
(
t
)
j
a
≤
t
≤
b
\begin{aligned} r(t)=g(t)i+h(t)j\quad a≤t≤b \end{aligned}
r(t)=g(t)i+h(t)ja≤t≤b则由上文可以知道
∫
L
F
⃗
T
⃗
⋅
d
s
=
∫
C
F
⃗
⋅
d
r
⃗
d
t
d
t
=
∫
L
(
M
d
g
(
t
)
d
t
+
N
h
(
t
)
d
t
)
d
t
=
∫
L
(
M
d
y
d
t
+
N
y
d
t
)
d
t
=
∫
L
M
d
x
+
N
d
y
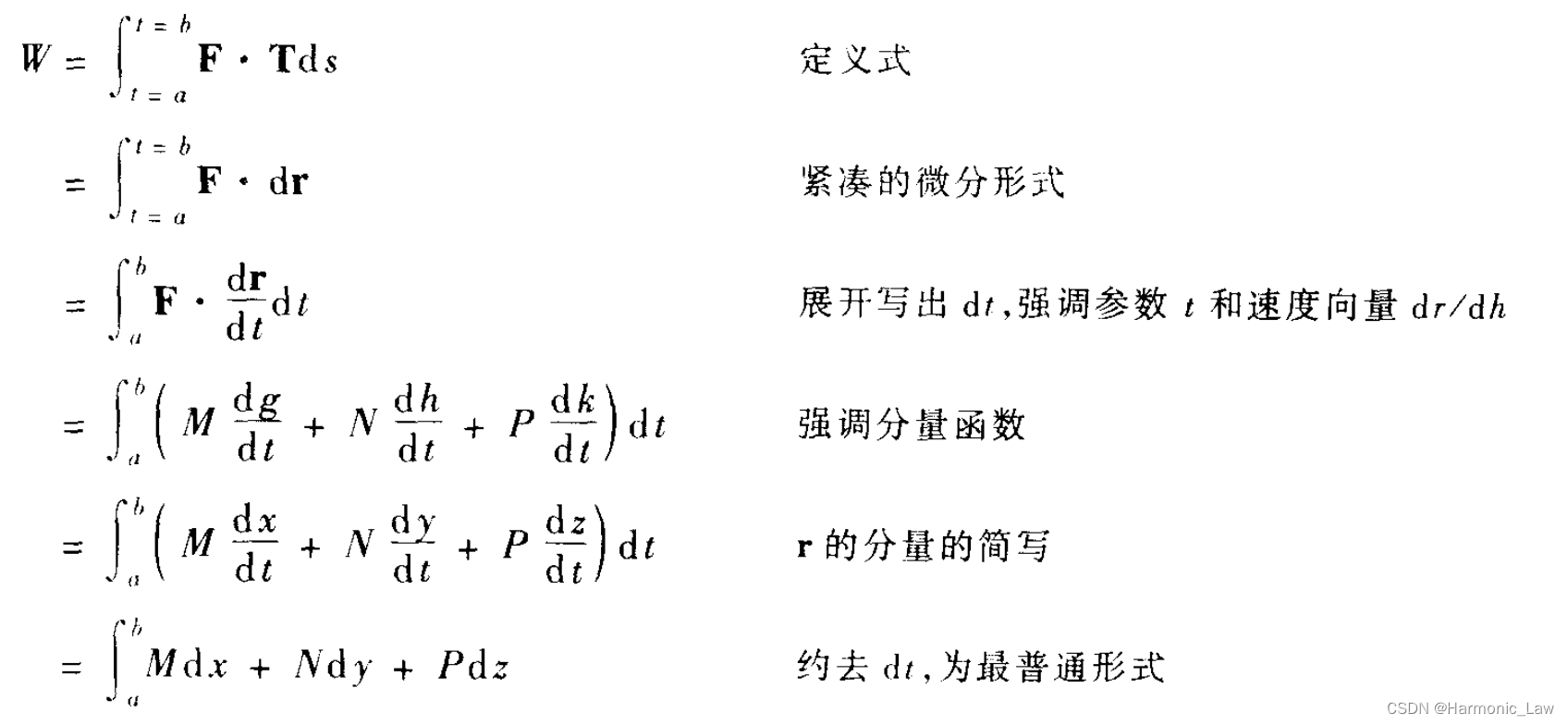
\begin{aligned} \int_{L}\vec{F}\vec{T}\cdot ds= \int_{C}\vec{F}\cdot\frac{\vec{dr}}{dt}dt =\int_L (M\frac{dg(t)}{dt}+N\frac{h(t)}{dt})dt=\int_L (M\frac{dy}{dt}+N\frac{y}{dt})dt=\int_L Mdx+Ndy \end{aligned}
∫LFT⋅ds=∫CF⋅dtdrdt=∫L(Mdtdg(t)+Ndth(t))dt=∫L(Mdtdy+Ndty)dt=∫LMdx+Ndy上方的等式,似乎已经给出了俩类曲线积分直接的关系;
上方 ( 1 ) (1) (1) 式中,我们假设 T ⃗ \vec{T} T始终式从起点到终点的曲线切线方向,那么在计算过程中下限带入小值,上限带入大值即可;也就是说计算的时候,是按照第一类曲线积分的计算方法,上下限分别为大值与小值;而后 4 4 4 式,是通过 d r ⃗ d t \frac{\vec{dr}}{dt} dtdr来找曲线的切线方向的,因此在带入上下限的时候需要以起点为下限,终点为上限
那么要如何找到曲线切向量 T ⃗ \vec{T} T就是联系二者的关键了
设曲线
L
L
L 上点
(
x
,
y
)
(x,y)
(x,y)处点切线向量的方向为
α
,
β
\alpha,\beta
α,β【该方向为参数t增大的方向】,那么
c
o
s
α
=
g
′
(
t
)
[
g
′
(
t
)
]
2
+
[
h
′
(
t
)
]
2
c
o
s
β
=
h
′
(
t
)
[
g
′
(
t
)
]
2
+
[
h
′
(
t
)
]
2
\begin{aligned} cos\alpha=\frac{g'(t)}{\sqrt{[g'(t)]^2+[h'(t)]^2}}\\ cos\beta=\frac{h'(t)}{\sqrt{[g'(t)]^2+[h'(t)]^2}} \end{aligned}
cosα=[g′(t)]2+[h′(t)]2g′(t)cosβ=[g′(t)]2+[h′(t)]2h′(t)由于我们找不到可以以一种形式表示俩种方向的
T
⃗
\vec{T}
T,因此我们使用
c
o
s
α
i
+
c
o
s
β
j
cos\alpha i+cos\beta j
cosαi+cosβj 来表示[参数t]增大时曲线的切线方向,于是有:
∫ L F ⃗ T ⃗ ⋅ d s = ∫ L ( M cos α + N cos β ) d s = ∫ L M d x + N d y \begin{aligned} \int_{L}\vec{F}\vec{T}\cdot ds= \int_{L}(M\cos\alpha+N\cos\beta)ds =\int_L Mdx+Ndy \end{aligned} ∫LFT⋅ds=∫L(Mcosα+Ncosβ)ds=∫LMdx+Ndy
需要注意的是,如果使用 ( 1 ) (1) (1)式来计算曲线积分,则它是第一类曲线积分,上下限分别带入大值与小值;而如果使用 ( 2 ) , ( 3 ) (2),(3) (2),(3)式来计算曲线积分,虽然其中 ( 2 ) (2) (2)式的样子像第一类曲线积分,但其本质还是第二类曲线积分,因此计算的时候上下限分别带入终点与起点;这就是俩类曲线积分直接的联系
5. 第二类曲线积分计算
虽然在上面我们进行理解时使用了切线的方向向量 T ⃗ \vec{T} T,但是在计算中我们并不计算 T ⃗ \vec{T} T,而是通过如下方法
(1)当被积分函数通过向量场 F ⃗ ( x , y , z ) \vec{F}(x,y,z) F(x,y,z) 给出,有向曲线通过向量场/参数方程给出时
- 带入有向曲线,将 F F F 写成参数 t t t 的函数;
- 求 d r ⃗ d t \frac{\vec{dr}}{dt} dtdr;
- 将 F F F 与 d r ⃗ d t \frac{\vec{dr}}{dt} dtdr 点乘
- 从起点到终点积分
总结为如下公式:
∫
C
F
⃗
(
x
,
y
,
z
)
⋅
d
r
⃗
=
∫
起点
终点
F
⃗
(
x
(
t
)
,
y
(
t
)
,
z
(
t
)
)
⋅
d
r
⃗
d
t
d
t
=
∫
起点
终点
(
M
d
x
(
t
)
d
t
+
N
d
y
(
t
)
d
t
+
P
d
z
(
t
)
t
)
d
t
\begin{aligned} \int_{C}\vec{F}(x,y,z)\cdot \vec{dr} = \int_{起点}^{终点}\vec{F}(x(t),y(t),z(t))\cdot\frac{\vec{dr}}{dt}dt=\int_{起点}^{终点} (M\frac{dx(t)}{dt}+N\frac{dy(t)}{dt}+P\frac{dz(t)}{t})dt \end{aligned}
∫CF(x,y,z)⋅dr=∫起点终点F(x(t),y(t),z(t))⋅dtdrdt=∫起点终点(Mdtdx(t)+Ndtdy(t)+Ptdz(t))dt
(2)当被积分函数通过分量给出,有向曲线通过向量场/参数方程/显示函数给出时
总结为如下公式:
∫
C
P
(
x
,
y
)
d
x
+
Q
(
x
,
y
)
d
y
=
∫
起点
终点
[
P
(
x
(
t
)
,
y
(
t
)
)
d
x
d
t
+
Q
(
x
(
t
)
,
y
(
t
)
)
d
y
d
t
]
d
t
\begin{aligned} \int_{C}P(x,y)dx+Q(x,y)dy = \int_{起点}^{终点}[P(x(t),y(t))\frac{dx}{dt}+Q(x(t),y(t))\frac{dy}{dt}]dt \end{aligned}
∫CP(x,y)dx+Q(x,y)dy=∫起点终点[P(x(t),y(t))dtdx+Q(x(t),y(t))dtdy]dt
此外还有格林公式可以来解决第二类曲线积分,下面进行详细说明
三、平面的格林(Green)定理
【 G r e e n Green Green公式】 具有俩种形式,分别为【通量-散度形式/法向形式】与【环量-旋度形式/切向形式】;其中后者可以帮助我们计算第二类曲线积分,它可以将线积分转化为二重积分,因此接下来详细说明该形式的格林公式
1. 流量与环量
设 F ⃗ \vec{F} F 代表通过一空间中区域流体的速度场,而不是力场(例如,一个潮汐的小海湾或水力发电机的汽轮机箱内);在这些情况下, F ⃗ ⋅ T ⃗ \vec{F}·\vec{T} F⋅T在区间内沿曲线的积分就给出流体沿曲线的流量.
定义 流量的积分和环流量:若r(t)为连续速度场F的定义域内的一条光滑曲线,则沿曲线从
t
=
a
t=a
t=a 到
t
=
b
t=b
t=b 的流量是
流量
=
∫
C
F
⃗
⋅
T
⃗
d
s
=
∫
a
b
F
⃗
⋅
d
r
⃗
d
t
d
t
\begin{aligned} 流量=\int_{C}\vec{F}·\vec{T}ds=\int_{a}^{b}\vec{F}·\frac{\vec{dr}}{dt}dt \end{aligned}
流量=∫CF⋅Tds=∫abF⋅dtdrdt这种情况下的积分就称为【流量】积分,若曲线是闭曲线,此流量又称为沿曲线的【环量】;可以看出【曲线的流量】就等于【第二类曲线积分】,当我们计算的是封闭曲线的时候,对曲线的第二类曲线积分就是曲线的环量
环量(Circulation):在二维空间中,环量是指沿着封闭曲线的矢量场的积分。对于一个矢量场 F = ( P , Q ) \mathbf{F} = (P, Q) F=(P,Q),其环量可表示为:
Circulation = ∮ C F ⋅ d r = ∮ C ( P d x + Q d y ) \text{Circulation} = \oint_C \mathbf{F} \cdot d\mathbf{r} = \oint_C (Pdx + Qdy) Circulation=∮CF⋅dr=∮C(Pdx+Qdy)
这里, C C C 是封闭曲线, F ⋅ d r \mathbf{F} \cdot d\mathbf{r} F⋅dr 表示矢量场 F \mathbf{F} F 在微小位移 d r d\mathbf{r} dr 上的投影。环量描述了矢量场沿着封闭曲线的“流动程度”。
2. 二维旋度/三维旋度k分量
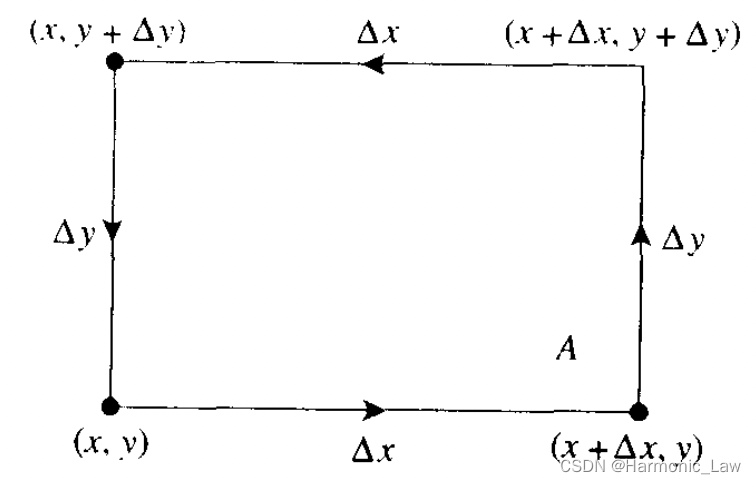
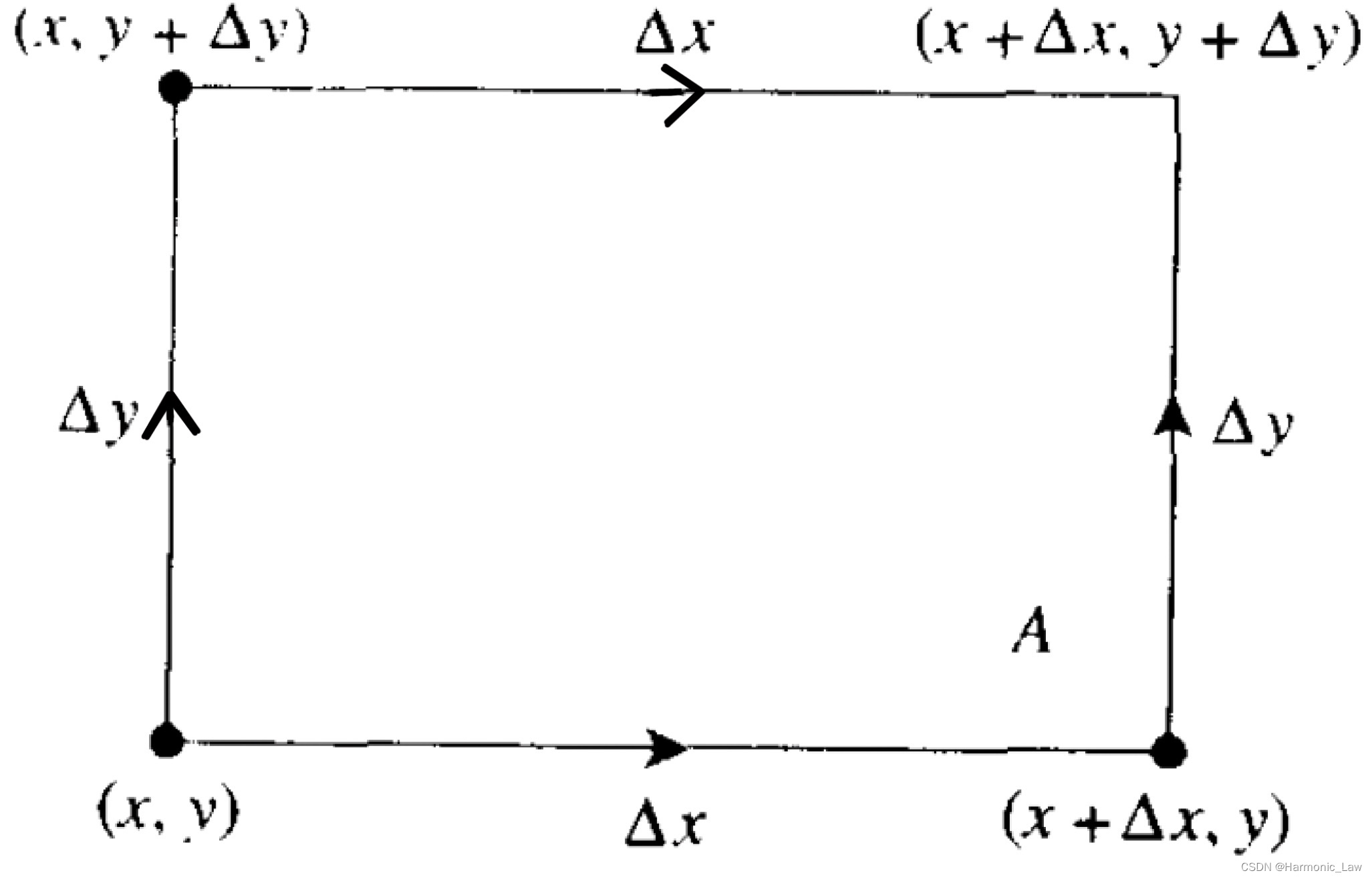
设 F ( x , y ) = M ( x , y ) i + N ( x , y ) j F(x,y)=M(x,y)i+N(x,y)j F(x,y)=M(x,y)i+N(x,y)j 为一个平面流体的速度场,并设 M , N M,N M,N 在区域R的每一点处的一阶偏导连续;设 ( x , y ) (x,y) (x,y) 为 R 内一点,且设A为一个小矩形,它的一个顶点在(x,y),且整个小矩形均位于R内;矩形的边平行于坐标轴,长度分别为 △ x △x △x 和 △ y △y △y;
F
F
F 绕A的边界的逆时针环量是对边界的第二类曲线积分,近似为:
F
(
x
,
y
)
⋅
i
△
x
=
M
(
x
,
y
)
△
x
.
\begin{aligned} F(x,y)·i△x =M(x,y)△x. \end{aligned}
F(x,y)⋅i△x=M(x,y)△x.
这是 F ( x , y ) F(x,y) F(x,y) 在 [切向量 i i i方向] 上的数值分量乘以该线段的长,而沿其它边逆时针的流速可以类似方法表出:
上边: F ( x , y + Δ y ) ⋅ ( − i ) Δ x = − M ( x , y + Δ y ) Δ x 下边: F ( x , y ) ⋅ i Δ x = M ( x , y ) Δ x 右侧边: F ( x + Δ x , y ) ⋅ j Δ y = N ( x + Δ x , y ) Δ y 左侧边: F ( x , y ) ⋅ ( − j ) Δ y = − N ( x , y ) Δ y \begin{aligned} 上边:F(x,y+\Delta y)\cdot(-i)\Delta x =-M(x,y+\Delta y)\Delta x\\ 下边:F(x,y)\cdot i\Delta x =M(x,y)\Delta x\qquad\qquad\qquad\;\quad\\ 右侧边:F(x+\Delta x,y)\cdot j\Delta y =N(x+\Delta x,y)\Delta y\:\qquad\\ 左侧边:F(x,y)\cdot (-j)\Delta y =-N(x,y)\Delta y\qquad\qquad\quad \end{aligned} 上边:F(x,y+Δy)⋅(−i)Δx=−M(x,y+Δy)Δx下边:F(x,y)⋅iΔx=M(x,y)Δx右侧边:F(x+Δx,y)⋅jΔy=N(x+Δx,y)Δy左侧边:F(x,y)⋅(−j)Δy=−N(x,y)Δy
把对边的结果相加,得:
上加下:
−
(
M
(
x
,
y
+
Δ
y
)
−
M
(
x
,
y
)
)
Δ
x
≈
−
(
∂
M
∂
y
Δ
y
)
Δ
x
左加右:
+
(
N
(
x
+
Δ
x
,
y
)
−
N
(
x
,
y
)
)
Δ
y
≈
−
(
∂
N
∂
x
Δ
x
)
Δ
y
\begin{aligned} 上加下:-(M(x,y+\Delta y)-M(x,y))\Delta x \approx -(\frac{\partial M}{\partial y}\Delta y)\Delta x\\ 左加右:+(N(x+\Delta x,y)-N(x,y))\Delta y \approx -(\frac{\partial N}{\partial x}\Delta x)\Delta y \end{aligned}
上加下:−(M(x,y+Δy)−M(x,y))Δx≈−(∂y∂MΔy)Δx左加右:+(N(x+Δx,y)−N(x,y))Δy≈−(∂x∂NΔx)Δy
此两式相加再除以△x△y,得出关于小矩形的【环量密度】的一个佔计:
绕小矩形的环量
小矩形的面积
≈
∂
N
∂
x
−
∂
M
∂
y
\begin{aligned} \frac{绕小矩形的环量}{小矩形的面积}\approx \frac{\partial N}{\partial x}-\frac{\partial M}{\partial y} \end{aligned}
小矩形的面积绕小矩形的环量≈∂x∂N−∂y∂M然后再令
△
x
,
△
y
△x,△y
△x,△y趋于零就可以定义F在点
(
x
,
y
)
(x,y)
(x,y)的环量密度
- 绕矩形的环量: ∮ C F ⃗ ⋅ T ⃗ d s \oint_C \vec{F}\cdot\vec{T}ds ∮CF⋅Tds
- 绕矩形的环量:在环量密度中对区域面积积分,即 ∬ D ( ∂ N ∂ x − ∂ M ∂ y ) d x d y \iint_D( \frac{\partial N}{\partial x}-\frac{\partial M}{\partial y})dxdy ∬D(∂x∂N−∂y∂M)dxdy
∮ C F ⃗ ⋅ T ⃗ d s = ∬ D ( ∂ N ∂ x − ∂ M ∂ y ) d x d y \begin{aligned} \oint_C \vec{F}\cdot\vec{T}ds=\iint_D( \frac{\partial N}{\partial x}-\frac{\partial M}{\partial y})dxdy \end{aligned} ∮CF⋅Tds=∬D(∂x∂N−∂y∂M)dxdy
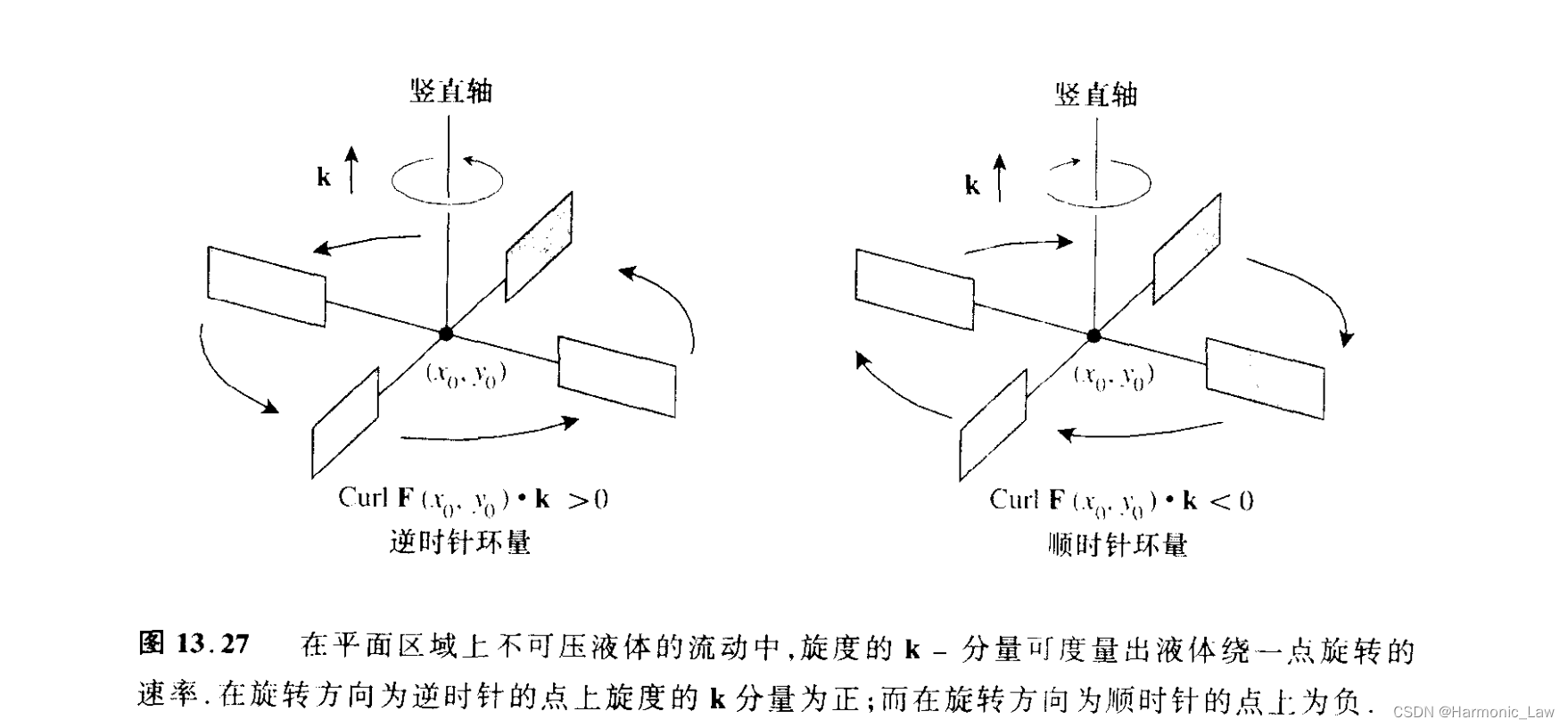
这里所求的的环量密度是二维空间中度旋度[数量值],是三维空间中选度的k分量[向量],而旋度的物理意义是描述矢量场在某一点的旋转程度和旋转方向,我们也可以从该角度理解选度的k分量
在二维空间中,于场函数 F = M ( x , y ) i + N ( x , y ) j F=M(x,y)i+N(x,y)j F=M(x,y)i+N(x,y)j,我们想要一个量来描述向量场的旋转程度,设定逆时针旋转旋度为正,顺时针方向旋度为负;假设在向量场内存在一点 ( x , y ) (x,y) (x,y),并且该点处场向量非常理想,让这个点沿着上图度矩形逆时针移动
当点处于下方边界时,该曲线边界处场函数的 M ( x , y ) M(x,y) M(x,y)应该为【正】;处于上方边界时,该曲线边界处场函数的 M ( x , y ) M(x,y) M(x,y) 应该为【负】;
同理,当点位于左曲线边界时, N ( x , y ) N(x,y) N(x,y)为【负】;右曲线边界时, N ( x , y ) N(x,y) N(x,y)为【正】
那么从下方到上方,也就是 y y y的方向,M从正到负;从左到右,也就是 x x x的方向,N从负到正;那么通过变化率来描述的话,有:
∂
M
∂
y
<
0
∂
N
∂
x
>
0
\begin{aligned} \frac{\partial M}{\partial y}<0\\\frac{\partial N}{\partial x}>0 \end{aligned}
∂y∂M<0∂x∂N>0那么这俩个偏导数就可以告诉我们场的【旋度信息】
2d.curl
F
⃗
=
∂
N
∂
x
−
∂
M
∂
y
\begin{aligned} \text{2d.curl} \:\vec{F}=\frac{\partial N}{\partial x}-\frac{\partial M}{\partial y} \end{aligned}
2d.curlF=∂x∂N−∂y∂M于是我们定义了二维旋度,其值越大,[旋转的速度] 越大
二维选度的特殊情况,当上方的场方向与下方相同,并且上方场小于下方,左侧的场方向与右侧相同,左侧场方向小于右侧,虽然这样的图像我们直观上并不是[旋转],但是其旋度不为0
旋度(Curl):旋度是描述矢量场旋转性质的一个概念。在三维空间中,对于一个矢量场 F = ( M , N , P ) \mathbf{F} = (M, N, P) F=(M,N,P),梯度算子[del/nabla]为 ∇ = [ ∂ ∂ y , ∂ ∂ z , ∂ ∂ x ] \nabla=[\frac{\partial}{\partial y},\frac{\partial}{\partial z},\frac{\partial}{\partial x}] ∇=[∂y∂,∂z∂,∂x∂],其旋度定义如下:
3d.curl F = ∇ × F = \text{3d.curl}\mathbf F = \nabla \times \mathbf{F}= 3d.curlF=∇×F= ∣ i j k ∂ ∂ x , ∂ ∂ x ∂ ∂ x M N P ∣ 3d.curl F = ∇ × F = ( ∂ P ∂ y − ∂ N ∂ z , ∂ M ∂ z − ∂ P ∂ x , ∂ N ∂ x − ∂ M ∂ y ) \begin{vmatrix} i & j & k \\ \frac{\partial}{\partial x}, & \frac{\partial}{\partial x} & \frac{\partial}{\partial x}\\ M & N & P\ \end{vmatrix}\\ \text{3d.curl } \mathbf{F} = \nabla \times \mathbf{F} = \left( \frac{\partial P}{\partial y} - \frac{\partial N}{\partial z}, \frac{\partial M}{\partial z} - \frac{\partial P}{\partial x}, \frac{\partial N}{\partial x} - \frac{\partial M }{\partial y} \right) i∂x∂,Mj∂x∂Nk∂x∂P 3d.curl F=∇×F=(∂y∂P−∂z∂N,∂z∂M−∂x∂P,∂x∂N−∂y∂M)
平面上环量密度的正向规定为绕竖轴逆时针旋转,是xy平面上从(竖直)单位k-向量的箭头向下看的逆时针方向;对格林定理,我们仅仅需要这个k-分量.
关于这里我们不需要理解旋度的含义,只需要知道对于格林公式,所使用的是旋度的k分量,其具体含义我们通过【斯托克斯(stokes)定理】来理解
定义:向量场
F
=
M
i
+
N
j
F=Mi+Nj
F=Mi+Nj在点
(
x
,
y
)
(x,y)
(x,y)的【环量密度】或者【旋度的
k
k
k-分量】为
(
c
u
r
l
F
⃗
)
⋅
k
⃗
=
∂
N
∂
x
−
∂
M
∂
y
\begin{aligned} (curl \vec{F})\cdot \vec{k} = \frac{\partial N}{\partial x}-\frac{\partial M}{\partial y} \end{aligned}
(curlF)⋅k=∂x∂N−∂y∂M
3. Green 定理
封闭路径的曲线积分可以用二重积分来计算
- 相关概念:
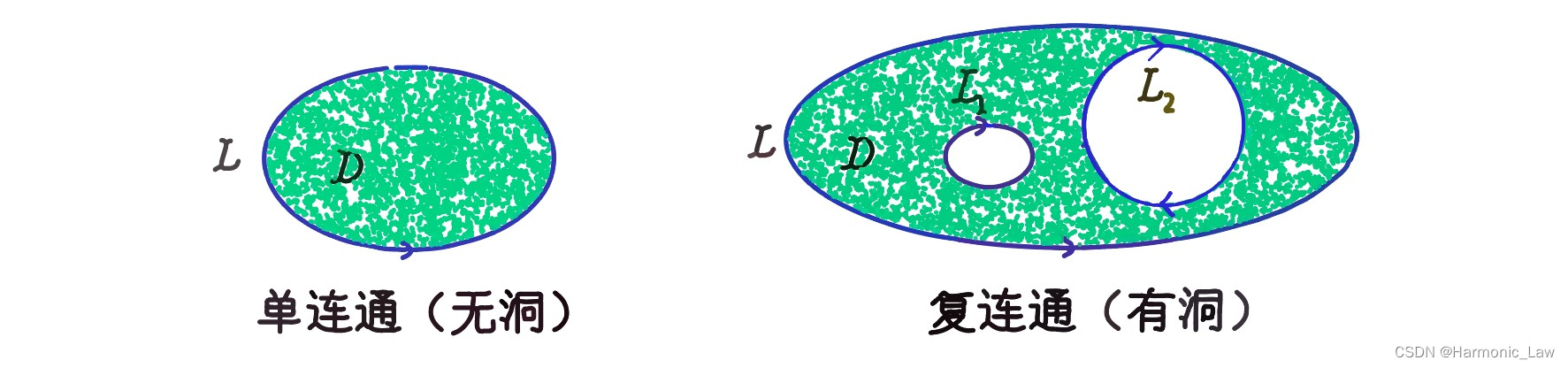
单连通/复连通: 设D为平面区域,如果D内任一闭曲线所围的部分区域都属于D,则D称为平面单连通区域;若D内存在曲线所围的部分区域不属于D,则称D为复连通区域。直观地说,单连通区域是没有空间的区域,否则称为复连通区域。
区域边界的正负向规定:设平面的闭曲线L围成平面区域D,并规定当一个人沿闭曲线L环行时,区域D总是位于此人的左侧,称此人行走方向为曲线L关于区域D的正方向,反之为负方向。
注意:区域边界的正向并不一定指逆时针,比如上图中的复连通区域的正向边界
- Green定理(环量-旋度形式或切向形式)
设闭区域D由分段光滑的曲线C围成, M ( x , y ) M(x,y) M(x,y) 及 N ( x , y ) N(x,y) N(x,y) 在上具有一阶连续偏导数,则场 F = M i + N j F=Mi+Nj F=Mi+Nj 绕平面 [简单闭曲线C] 的【正方向】的环量等于 ( 3 d . c u r l F ) ⋅ k (3d.curl F)·k (3d.curlF)⋅k在 C C C所围区域R上的二重积分
∮ C F ⃗ ⋅ T ⃗ d s = ∮ C M d x + N d y = ∬ D ( ∂ N ∂ x − ∂ M ∂ y ) d x d y \begin{aligned} \oint_C \vec{F}\cdot\vec{T}ds=\oint_CMdx+Ndy=\iint_D( \frac{\partial N}{\partial x}-\frac{\partial M}{\partial y})dxdy \end{aligned} ∮CF⋅Tds=∮CMdx+Ndy=∬D(∂x∂N−∂y∂M)dxdy
- 格林公式使用的条件
- 曲线C是分段光滑的封闭曲线,围成了区域D
- 曲线C是区域D的正向边界
- M和N在区域D内具有一阶连续偏导数
- 应用格林公式的注意点
- 注意:格林公式对于单连通区域和复连通区域来说都是可以使用的;对于复连通区域,我们可以通过对其添加辅助线使其成为若干个单连通区域的代数和;
- 注意:对于复连通区域D,格林公式的右端应包括沿区域D的全部边界的曲线积分,且边界方向对区域D来说都是正向
- 注意:使用格林公式,如果曲线C不是封闭曲线则需要添加辅助线,一般是用有向且平行于坐标周的直线或折线【因为平行于 x x x轴直线 d y = 0 dy=0 dy=0,平行于 y y y轴的直线 d x = 0 dx=0 dx=0】;
- 应用格林公式求面积:
在格林公式中若求
M
=
−
y
,
N
=
x
M=-y,N=x
M=−y,N=x则
∮
C
x
d
y
−
y
d
x
=
∬
D
2
d
x
d
y
=
2
A
\begin{aligned} \oint_C xdy-ydx=\iint_{D}2dxdy=2A \end{aligned}
∮Cxdy−ydx=∬D2dxdy=2A于是有
A
=
1
2
∮
C
x
d
y
−
y
d
x
\begin{aligned} A=\frac{1}{2}\oint_C xdy-ydx \end{aligned}
A=21∮Cxdy−ydx
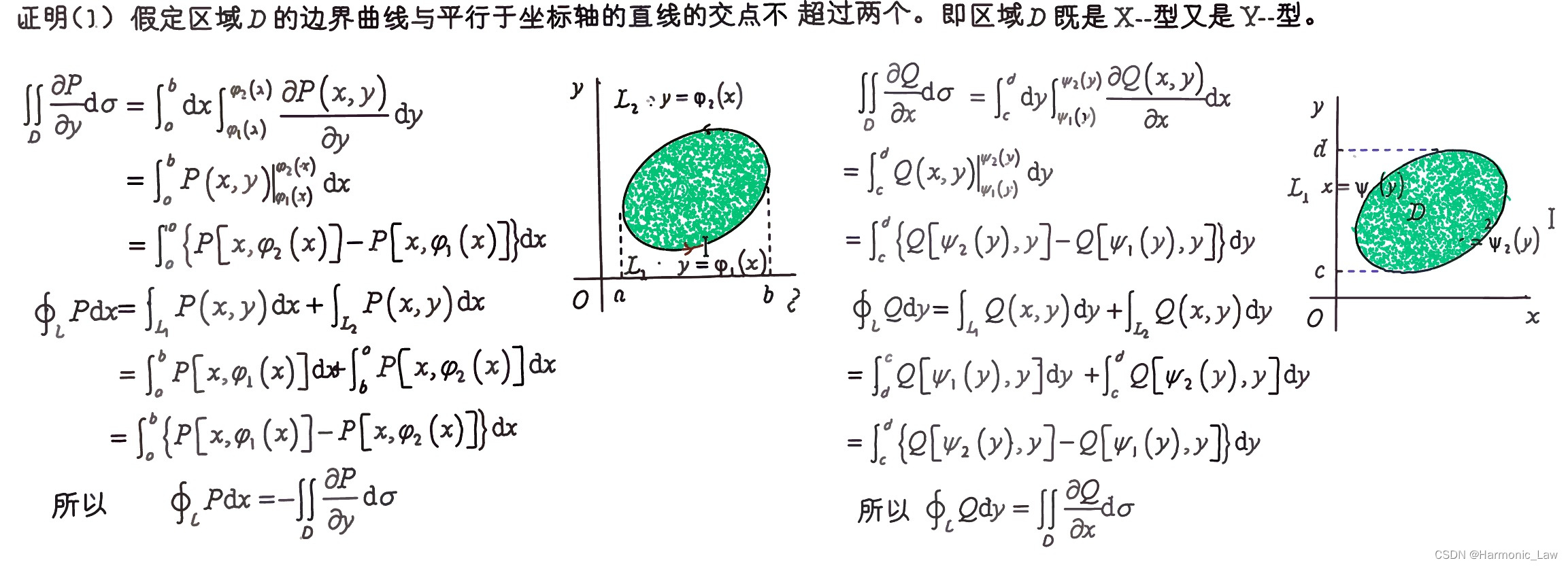
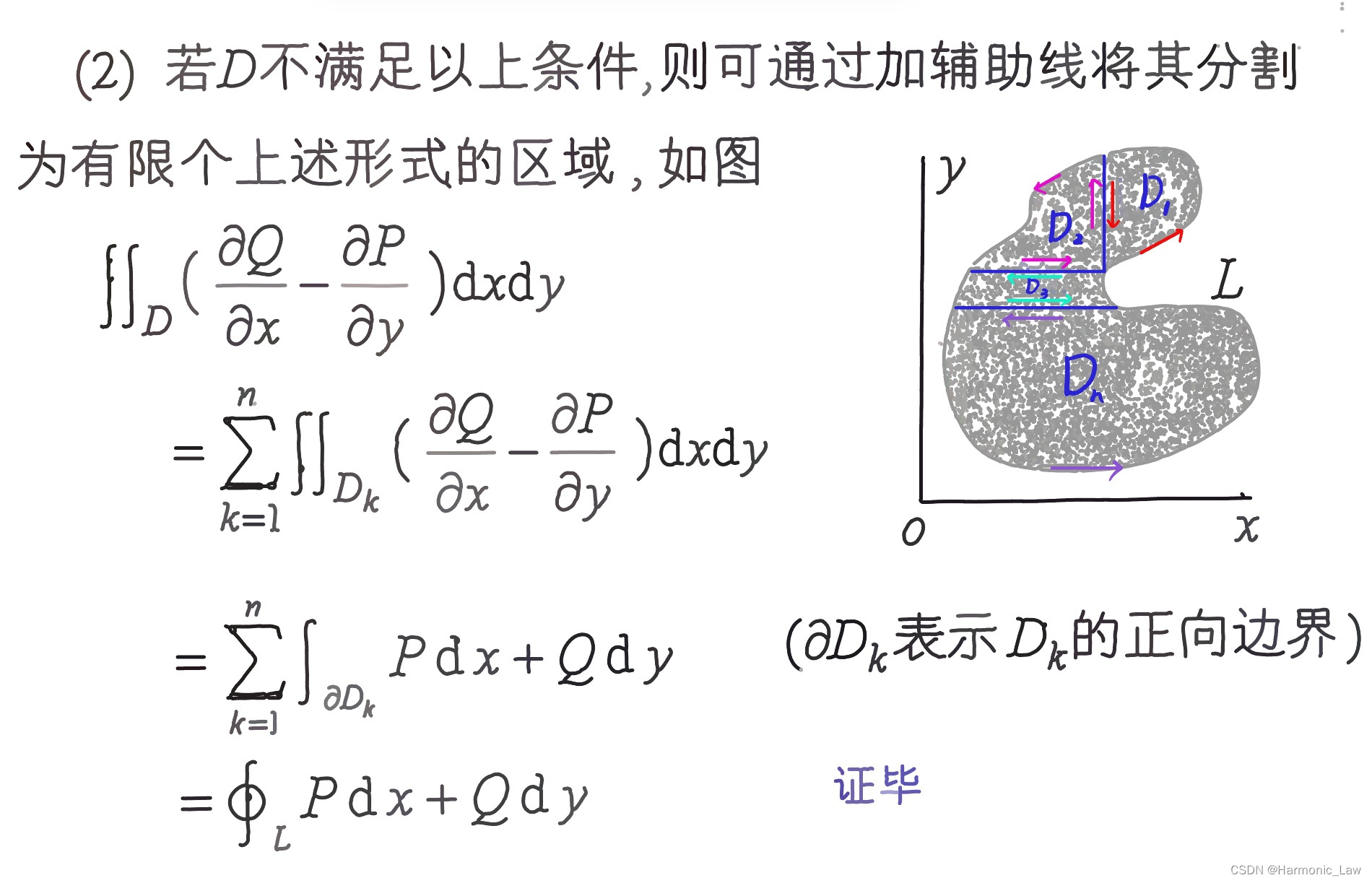
4. 格林公式的证明
5. 格林公式在题目中的应用
- 曲线封闭且内部无奇点,则直接使用格林公式
- 曲线封闭但内部有奇点,则先进行补线,然后利用带入性质,得到若干个曲线封闭且内部无奇点点区域,最后对若干个区域直接使用格林公式
- 曲线不封闭,则可进行补线使其封闭(注意形成的新区域内部不可有奇点),最后对新区域直接使用格林公式
高斯公式在题目中的应用也类似
- 曲面粉笔且内部无奇点,则直接使用高斯公式
- 曲线封闭但内部有奇点,则先进行补面,然后利用带入性质,得到若干个曲面封闭且内部无奇点的区域,最后对若干个区域试验高斯公式
- 曲面不封闭,则可先进行补面使其封闭(注意形成的新区域内部可以有奇点,最后对新区域直接使用高斯公式)
四、曲线积分与路径无关
1. 曲线积分与路径无关条件
设 D D D是单连通域,函数 P ( x , y ) , Q ( x , y ) P(x,y),Q(x,y) P(x,y),Q(x,y)在 D D D内有一阶连续偏导数,则以下四个条件等价:
- 沿D中任意光滑【封闭曲线 L L L】,有【 ∮ L P d x + Q d y = 0 \oint_{L}Pdx+Qdy=0 ∮LPdx+Qdy=0】
- 对D中任意分段光滑曲线L,曲线积分 ∮ L P d x + Q d y \oint_{L}Pdx+Qdy ∮LPdx+Qdy值域路径无关,只与起止点有关
- ∮ L P d x + Q d y \oint_{L}Pdx+Qdy ∮LPdx+Qdy在D内式某一函数 u ( x , y ) u(x,y) u(x,y)的全微分,即使 d u ( x , y ) = P d x + Q d y = 0 du(x,y)=Pdx+Qdy=0 du(x,y)=Pdx+Qdy=0
- 在D内每一点都有 ∂ P ∂ y = ∂ Q ∂ x \frac{\partial{P}}{\partial{y}}=\frac{\partial{Q}}{\partial{x}} ∂y∂P=∂x∂Q
我们采取循环论证的方法证明:
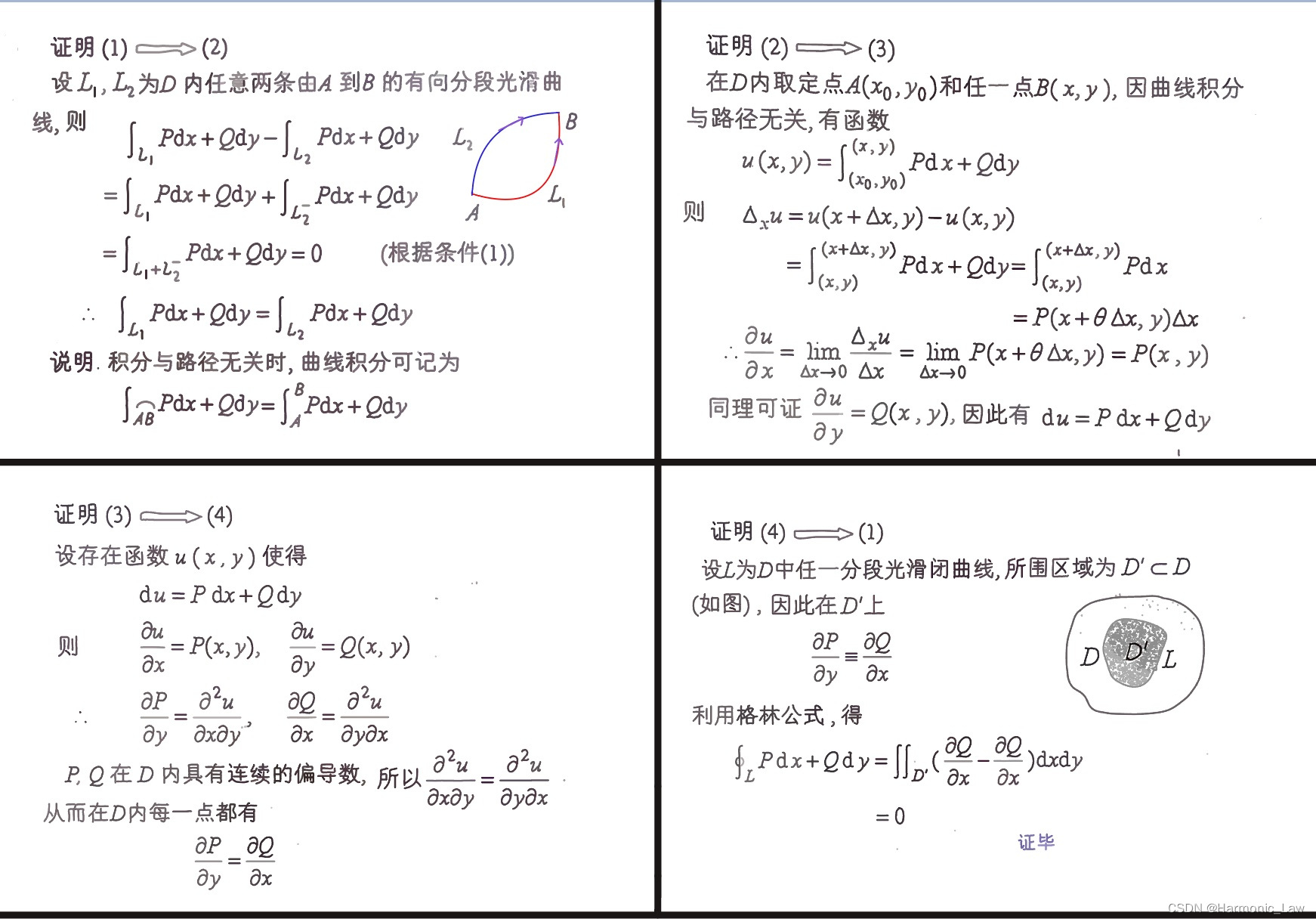
在计算曲线积分时,根据定理(2),若在某区域内有 ∂ P ∂ y = ∂ Q ∂ x \frac{\partial{P}}{\partial{y}}=\frac{\partial{Q}}{\partial{x}} ∂y∂P=∂x∂Q,则
- 计算曲线积分可以 选择方便的积分路径,比如坐标轴上的线段或平行于坐标轴的线段
- 计算曲线积分时,若曲线是封闭曲线,并且为正向曲线(负向曲线取负值),则可以使用格林公式将曲线积分转化为二重积分来进行计算;
- 计算曲线积分时,若曲线不是封闭曲线,则 添加辅助线使其成为【有向封闭曲线】,然后利用格林公式; ( 1 ) (1) (1) 若该辅助线平行于坐标轴,则可以大大减小曲线积分的计算; ( 2 ) (2) (2) 需要注意所添加的辅助线上不可以含有【奇点】,新【有向封闭曲线围成的区域】也不可以有【奇点】
2. 保守场与势函数
在引力场和电场中,移动一物体或一电荷从一点到另一点所要作的功仅依赖物体移动的始点和终点,不依赖这两点间的路径;功的积分与路径无关的概念,这种场的性质可以帮我我们化解某些曲线积分的计算
设 F F F 是定义在空间 开区域 D 开区域D 开区域D 上的场,假设对D内任意两点A与B,从A到B所做的功 ∫ A B F ⃗ ⋅ d r ⃗ \int_{A}^{B}\vec{F}\cdot\vec{dr} ∫ABF⋅dr对所有从A到B的路径都相同,则积分 ∫ A B F ⃗ ⋅ d r ⃗ \int_{A}^{B}\vec{F}\cdot\vec{dr} ∫ABF⋅dr在D内是【路径无关】的并且 【称 F F F 在 D D D 上是保守场】.
实际中当条件满足时,当且仅当 F F F是 [数量函数 f f f] 的梯度场,场F是保守的;也就是说存在 f , F = ▽ f f, F =▽f f,F=▽f成立时,此时在区域D内的第二类曲线积分的值与积分路径无关,只与起点和终点有关
∇
\nabla
∇ 就是梯度算子,三维情况下
F
⃗
(
x
,
y
,
z
)
=
▽
f
(
x
,
y
,
z
)
\vec{F}(x,y,z)=▽f(x,y,z)
F(x,y,z)=▽f(x,y,z)
F
⃗
=
M
(
x
,
y
,
z
)
i
+
N
(
x
,
y
,
z
)
j
+
P
(
x
,
y
,
z
)
k
=
∇
f
=
∂
f
∂
x
i
+
∂
f
∂
x
j
+
∂
f
∂
x
k
\begin{aligned} \vec{F}=M(x,y,z)i+N(x,y,z)j+P(x,y,z)k=\nabla f=\frac{\partial f}{\partial x}i+\frac{\partial f}{\partial x}j+\frac{\partial f}{\partial x}k \end{aligned}
F=M(x,y,z)i+N(x,y,z)j+P(x,y,z)k=∇f=∂x∂fi+∂x∂fj+∂x∂fk
证明:
F
⃗
(
x
,
y
,
z
)
=
▽
f
(
x
,
y
,
z
)
\vec{F}(x,y,z)=▽f(x,y,z)
F(x,y,z)=▽f(x,y,z) 可以推出路径无关性;设A与B为D内俩点,且
C
:
r
(
t
)
=
g
(
t
)
i
+
h
(
t
)
j
+
k
(
t
)
k
C:r(t)=g(t)i+h(t)j+k(t)k
C:r(t)=g(t)i+h(t)j+k(t)k为D内连接A和B的光滑曲线,设起点为A,对应参数为
t
=
t
A
t=t_A
t=tA,坐标为
(
x
A
,
y
A
,
z
A
)
(x_A,y_A,z_A)
(xA,yA,zA);设终点为B,对应参数为
t
=
t
B
t=t_B
t=tB,坐标为
(
x
B
,
y
B
,
z
B
)
(x_B,y_B,z_B)
(xB,yB,zB);
f
f
f为t的可微函数
d
f
d
t
=
∂
f
∂
x
d
x
d
t
+
∂
f
∂
y
d
y
d
t
+
∂
f
∂
z
d
z
d
t
=
▽
f
⋅
d
x
d
t
i
+
d
y
d
t
j
+
d
z
d
t
k
=
▽
f
⋅
d
r
d
t
=
F
⋅
d
r
d
t
\begin{aligned} \frac{df}{dt}=\frac{\partial{f}}{\partial{x}}\frac{dx}{dt}+\frac{\partial{f}}{\partial{y}}\frac{dy}{dt}+\frac{\partial{f}}{\partial{z}}\frac{dz}{dt}\\ =▽f\cdot \frac{dx}{dt}i+\frac{dy}{dt}j+\frac{dz}{dt}k\quad\\ =▽f\cdot \frac{dr}{dt}=F\cdot \frac{dr}{dt}\quad\quad\quad\; \end{aligned}
dtdf=∂x∂fdtdx+∂y∂fdtdy+∂z∂fdtdz=▽f⋅dtdxi+dtdyj+dtdzk=▽f⋅dtdr=F⋅dtdr 于是
∫
C
M
(
x
,
y
,
z
)
d
x
+
N
(
x
,
y
,
z
)
d
y
+
P
(
x
,
y
,
z
)
d
z
=
∫
t
A
t
B
F
⃗
⋅
d
r
d
t
d
t
=
∫
t
A
t
B
d
f
d
t
d
t
=
∫
(
x
A
,
y
A
,
z
A
)
(
x
B
,
y
B
,
z
B
)
d
f
(
x
,
y
,
z
)
=
f
(
x
B
,
y
B
,
z
B
)
−
f
(
x
A
,
y
A
,
z
A
)
\begin{aligned} \int_{C}M(x,y,z)dx+N(x,y,z)dy+P(x,y,z)dz\\=\int_{t_A}^{t_B}\vec{F}\cdot\frac{dr}{dt}dt=\int_{t_A}^{t_B}\frac{df}{dt}dt\quad\quad\;\\ =\int_{(x_A,y_A,z_A)}^{(x_B,y_B,z_B)}df(x,y,z)\quad\quad\quad\quad\;\\ =f(x_B,y_B,z_B)-f(x_A,y_A,z_A)\;\; \end{aligned}
∫CM(x,y,z)dx+N(x,y,z)dy+P(x,y,z)dz=∫tAtBF⋅dtdrdt=∫tAtBdtdfdt=∫(xA,yA,zA)(xB,yB,zB)df(x,y,z)=f(xB,yB,zB)−f(xA,yA,zA)
于是此时的问题关键在于如何找到场 F F F对应的势函数 f f f;根据等式关系我们可以知道 f f f满足:
M ( x , y , z ) = ∂ f ∂ x N ( x , y , z ) = ∂ f ∂ y P ( x , y , z ) = ∂ f ∂ z \begin{aligned} M(x,y,z)=\frac{\partial f}{\partial x}\\ N(x,y,z)=\frac{\partial f}{\partial y}\\ P(x,y,z)=\frac{\partial f}{\partial z} \end{aligned} M(x,y,z)=∂x∂fN(x,y,z)=∂y∂fP(x,y,z)=∂z∂f
但是满足这三个等式的 f f f函数不一定总是存在,只有当场为保守场时才会存在势函数 f f f,此时曲线积分才与路径无关
在之前的格林公式中,我们知道:【区域D内曲线积分才与路径无关】与【区域D内每一点都满足 ∂ M ∂ y = ∂ N ∂ x \frac{\partial{M}}{\partial{y}}=\frac{\partial{N}}{\partial{x}} ∂y∂M=∂x∂N】等价;而实际上这也与场 F ⃗ = M ( x , y ) i + N ( x , y ) j \vec{F}=M(x,y)i+N(x,y)j F=M(x,y)i+N(x,y)j是保守场等价;
我们将该等价条件扩展到三维,就有了三维保守场的判断方法:

3. 全微分求积/求场的势函数
设
M
(
x
,
y
)
,
N
(
x
,
y
)
M(x,y),N(x,y)
M(x,y),N(x,y)在区域D有连续的一阶偏导数,若
d
f
(
x
,
y
)
=
M
(
x
,
y
)
d
x
+
N
(
x
,
y
)
d
y
df(x,y)=M(x,y)dx+N(x,y)dy
df(x,y)=M(x,y)dx+N(x,y)dy,则称方程:
M
(
x
,
y
)
d
x
+
N
(
x
,
y
)
d
y
=
0
\begin{aligned} M(x,y)dx+N(x,y)dy=0 \end{aligned}
M(x,y)dx+N(x,y)dy=0 为 【全微分方程】 ,求该方程的通解即求解
f
(
x
,
y
)
f(x,y)
f(x,y)
注意:形如
M
(
x
,
y
)
d
x
+
N
(
x
,
y
)
d
y
=
0
M(x,y)dx+N(x,y)dy=0
M(x,y)dx+N(x,y)dy=0的方程不一定是全微分方程,有可能不存在
f
(
x
,
y
)
f(x,y)
f(x,y)使:
M
(
x
,
y
)
=
∂
f
∂
x
N
(
x
,
y
)
=
∂
f
∂
y
\begin{aligned} M(x,y)=\frac{\partial f}{\partial x}\\ N(x,y)=\frac{\partial f}{\partial y} \end{aligned}
M(x,y)=∂x∂fN(x,y)=∂y∂f成立
而方程为全微分方程的等价条件是: ∂ M ∂ y = ∂ N ∂ y \frac{\partial M}{\partial y}=\frac{\partial N}{\partial y} ∂y∂M=∂y∂N;
若不满足全微分方程条件时,可以引入积分因子 μ ( x , y ) ! = 0 \mu(x,y)!=0 μ(x,y)!=0,使其成为全微分方程(注意积分因子一般不是唯一的)
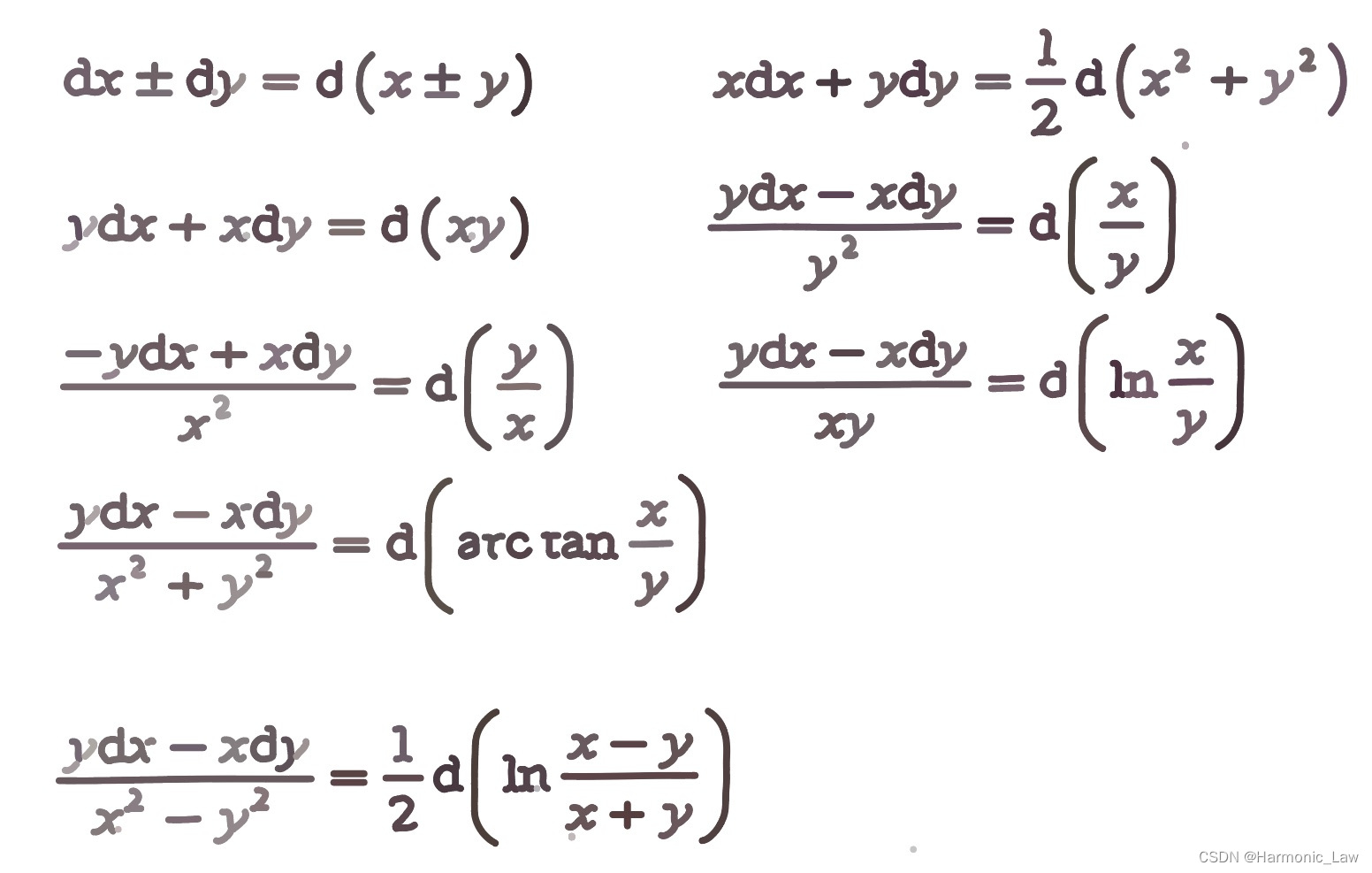
下面是一些常见的二元函数的全微分:
下面讨论在方程已经被确定为全微分方程的求解过程:
- 方法一
由全微分性质或由保守场与其势函数的关系,有:
M
(
x
,
y
)
=
∂
f
∂
x
N
(
x
,
y
)
=
∂
f
∂
y
\begin{aligned} M(x,y)=\frac{\partial f}{\partial x}\\ N(x,y)=\frac{\partial f}{\partial y} \end{aligned}
M(x,y)=∂x∂fN(x,y)=∂y∂f 因此我们直接对这俩个微分方程进行求解,设A(x,y)为函数f中存在x的部分,B(x,y)为函数f中存在y的部分,分别可以得到:
∫
M
(
x
,
y
)
d
x
=
A
(
x
,
y
)
+
C
(
y
)
=
f
∫
N
(
x
,
y
)
d
y
=
B
(
x
,
y
)
+
C
(
x
)
=
f
\begin{aligned} \int M(x,y)dx=A(x,y)+C(y)=f\\ \int N(x,y)dy=B(x,y)+C(x)=f \end{aligned}
∫M(x,y)dx=A(x,y)+C(y)=f∫N(x,y)dy=B(x,y)+C(x)=f然后通过对比系数,最后在得到的式子后加常数C,并使其等于0,就可以求得到该全微分方程的通解
- 方法二
由曲线积分与路径无关的等价条件可知, d f ( x , y ) = M ( x , y ) d x + N ( x , y ) d y df(x,y)=M(x,y)dx+N(x,y)dy df(x,y)=M(x,y)dx+N(x,y)dy存在与 ∫ C M ( x , y ) d x + N ( x , y ) d y \int_{C}M(x,y)dx+N(x,y)dy ∫CM(x,y)dx+N(x,y)dy的值与路径无关等价;并且 F ⃗ = M ( x , y ) i + N ( x , y ) j = ∇ f = ∂ f ∂ x i + ∂ f ∂ x j \vec{F}=M(x,y)i+N(x,y)j=\nabla f=\frac{\partial f}{\partial x}i+\frac{\partial f}{\partial x}j F=M(x,y)i+N(x,y)j=∇f=∂x∂fi+∂x∂fj,即 f ( x , y ) f(x,y) f(x,y)就是 F = M ( x , y ) i + N ( x , y ) j F=M(x,y)i+N(x,y)j F=M(x,y)i+N(x,y)j的势函数
那么我们在区域 D D D内选择俩点 ( x 0 , y 0 ) (x_0,y_0) (x0,y0)与 ( x , y ) (x,y) (x,y),其中前者作为积分起点,后者作为积分终点,在区域D内从起点连接到终点的任意有向曲线为C;由上文可知:
∫ C M ( x , y ) d x + N ( x , y ) d y = ∫ t A t B F ⃗ ⋅ d r d t d t = ∫ t A t B d f d t d t = ∫ ( x 0 , y 0 ) ( x , y ) d f ( x , y ) = f ( x , y ) − f ( x 0 , y 0 ) \begin{aligned} \int_{C}M(x,y)dx+N(x,y)dy\quad\;\;\\ =\int_{t_A}^{t_B}\vec{F}\cdot\frac{dr}{dt}dt=\int_{t_A}^{t_B}\frac{df}{dt}dt\quad\\ =\int_{(x_0,y_0)}^{(x,y)}df(x,y)\qquad\quad\quad\quad\;\;\;\\ =f(x,y)-f(x_0,y_0)\qquad\quad\;\;\;\;\; \end{aligned} ∫CM(x,y)dx+N(x,y)dy=∫tAtBF⋅dtdrdt=∫tAtBdtdfdt=∫(x0,y0)(x,y)df(x,y)=f(x,y)−f(x0,y0)
那么由于积分的路径无关性,对 ∫ C M ( x , y ) d x + N ( x , y ) d y \int_{C}M(x,y)dx+N(x,y)dy ∫CM(x,y)dx+N(x,y)dy的积分路径可以选择【平行于坐标轴的路径】,这样计算会比较简单
注意:选择的路径一定要满足 M ( x , y ) , N ( x , y ) M(x,y),N(x,y) M(x,y),N(x,y)在该路径上有连续的一阶偏导数
比如选择从 ( x 0 , y 0 ) (x_0,y_0) (x0,y0)到 ( x , y 0 ) (x,y_0) (x,y0),然后从 ( x , y 0 ) (x,y_0) (x,y0)到达 ( x 0 , y 0 ) (x_0,y_0) (x0,y0)的路径,则有
∫ ( x 0 , y 0 ) ( x , y ) M ( x , y ) d x + N ( x , y ) d y = ∫ x 0 x [ M ( x , y 0 ) d x + N ( x , y 0 ) d y ] + ∫ y 0 y [ M ( x 0 , y ) d x + N ( x 0 , y ) d y ] = ∫ x 0 x M ( x , y 0 ) d x + ∫ y 0 y N ( x 0 , y ) d y \begin{aligned} \int_{(x_0,y_0)}^{(x,y)}M(x,y)dx+N(x,y)dy=\int_{x_0}^{x}[M(x,y_0)dx+N(x,y_0)dy]+\int_{y_0}^{y}[M(x_0,y)dx+N(x_0,y)dy]\\ =\int_{x_0}^{x}M(x,y_0)dx+\int_{y_0}^{y}N(x_0,y)dy\qquad\qquad\qquad\qquad\qquad\qquad\;\;\; \end{aligned} ∫(x0,y0)(x,y)M(x,y)dx+N(x,y)dy=∫x0x[M(x,y0)dx+N(x,y0)dy]+∫y0y[M(x0,y)dx+N(x0,y)dy]=∫x0xM(x,y0)dx+∫y0yN(x0,y)dy
最后在求解结果后加常数
C
C
C,然后使
f
(
x
,
y
)
=
0
f(x,y)=0
f(x,y)=0即可得到通解;即:
f
(
x
,
y
)
=
∫
x
0
x
M
(
x
,
y
0
)
d
x
+
∫
y
0
y
N
(
x
0
,
y
)
d
y
+
C
=
0
\begin{aligned} f(x,y)=\int_{x_0}^{x}M(x,y_0)dx+\int_{y_0}^{y}N(x_0,y)dy+C=0 \end{aligned}
f(x,y)=∫x0xM(x,y0)dx+∫y0yN(x0,y)dy+C=0
选择不同的起点只是在求解的结果的常数项不同,最后添加常数C即可统一,因此在求解全微分通解的时候可以选择方便计算的起点



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









