







FullInertialBA
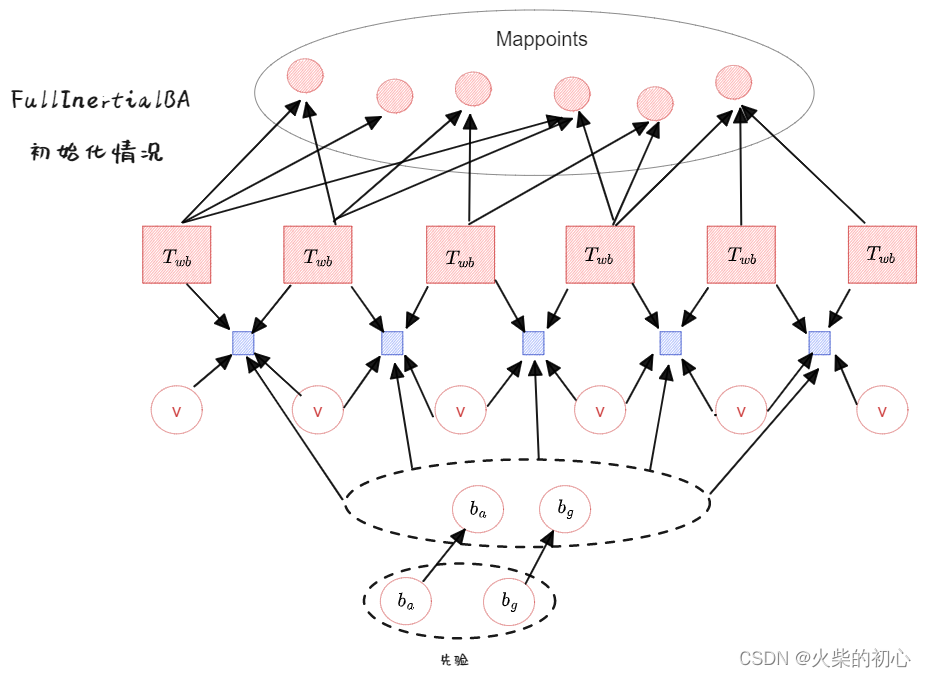
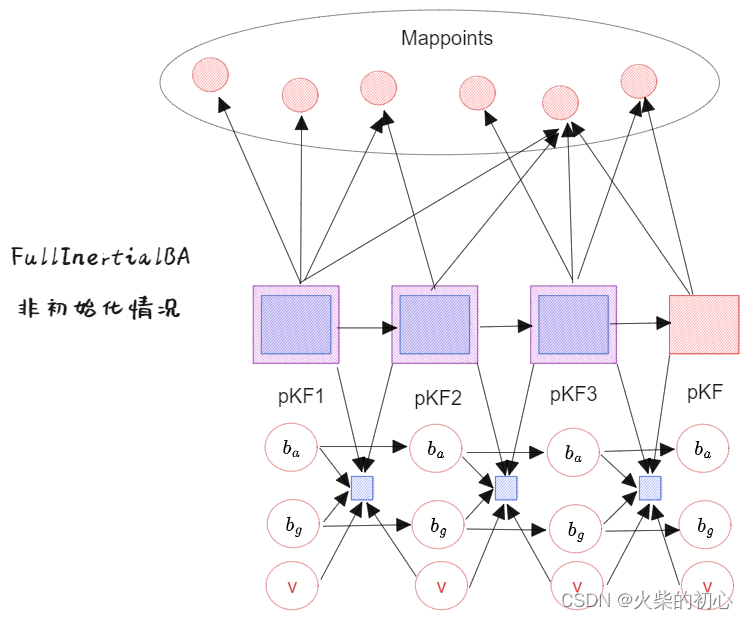
FullInertialBA的主要作用是结合视觉和IMU信息进行联合优化,主要作用在LocalMapping中的initializeIMU和LoopClosing中的RunGlobalBundleAdjustment
- 在初始化阶段,bias固定不变,通过先验,约束bias为一个微小量
输入
| 参数 | 说明 |
|---|---|
| pMap | 地图 |
初始化
g2o::SparseOptimizer optimizer;
g2o::BlockSolverX::LinearSolverType *linearSolver;
linearSolver = new g2o::LinearSolverEigen<g2o::BlockSolverX::PoseMatrixType>();
g2o::BlockSolverX *solver_ptr = new g2o::BlockSolverX(linearSolver);
g2o::OptimizationAlgorithmLevenberg *solver = new g2o::OptimizationAlgorithmLevenberg(solver_ptr);
solver->setUserLambdaInit(1e-5);
optimizer.setAlgorithm(solver);
optimizer.setVerbose(false);
if (pbStopFlag)
optimizer.setForceStopFlag(pbStopFlag);
设置vertex
对于地图中的关键帧
VertexPose *VP = new VertexPose(pKFi);
VP->setId(pKFi->mnId);
pIncKF = pKFi;
bool bFixed = false;
if (bFixLocal)
{
bFixed = (pKFi->mnBALocalForKF >= (maxKFid - 1)) || (pKFi->mnBAFixedForKF >= (maxKFid - 1));
if (!bFixed)
nNonFixed++;
VP->setFixed(bFixed);
}
optimizer.addVertex(VP);
- VertexVelocity
需要该地图完成IMU初始化后才添加,也就是关键帧的bImu为true
VertexVelocity *VV = new VertexVelocity(pKFi);
VV->setId(maxKFid + 3 * (pKFi->mnId) + 1);
VV->setFixed(bFixed);
optimizer.addVertex(VV);
- VertexGyroBias
- 当有先验信息时,只添加最后一帧关键帧的bias
- 当没有先验信息时,每一帧关键帧都添加bias
VertexGyroBias *VG = new VertexGyroBias(pKFi);
VG->setId(maxKFid + 3 * (pKFi->mnId) + 2);
VG->setFixed(bFixed);
optimizer.addVertex(VG);
- VertexAccBias
- 当有先验信息时,只添加最后一帧关键帧的bias
- 当没有先验信息时,每一帧关键帧都添加bias
VertexAccBias *VA = new VertexAccBias(pKFi);
VA->setId(maxKFid + 3 * (pKFi->mnId) + 3);
VA->setFixed(bFixed);
optimizer.addVertex(VA);
对于地图中的地图点
MapPoint *pMP = vpMPs[i];
g2o::VertexSBAPointXYZ *vPoint = new g2o::VertexSBAPointXYZ();
vPoint->setEstimate(pMP->GetWorldPos().cast<double>());
unsigned long id = pMP->mnId + iniMPid + 1;
vPoint->setId(id);
vPoint->setMarginalized(true);
optimizer.addVertex(vPoint);
设置edge
添加IMU边
- EdgeInertial
- 当有先验信息时,边的两个Vertex:
VG1和VA1为最后一帧关键帧的bias,同时添加先验边EdgePriorAcc和EdgePriorGyro - 当没有先验信息时,边的两个Vertex:
VG1和VA1为前一关键帧的bias,同时在前后两帧之间添加边EdgeGyroRW]和EdgeAccRW
- 当有先验信息时,边的两个Vertex:
// 3.1 根据上一帧的偏置设定当前帧的新偏置
pKFi->mpImuPreintegrated->SetNewBias(pKFi->mPrevKF->GetImuBias());
// 3.2 提取节点
g2o::HyperGraph::Vertex *VP1 = optimizer.vertex(pKFi->mPrevKF->mnId);
g2o::HyperGraph::Vertex *VV1 = optimizer.vertex(maxKFid + 3 * (pKFi->mPrevKF->mnId) + 1);
g2o::HyperGraph::Vertex *VG1;
g2o::HyperGraph::Vertex *VA1;
g2o::HyperGraph::Vertex *VG2;
g2o::HyperGraph::Vertex *VA2;
// 根据不同输入配置相应的偏置节点
if (!bInit)
{
VG1 = optimizer.vertex(maxKFid + 3 * (pKFi->mPrevKF->mnId) + 2);
VA1 = optimizer.vertex(maxKFid + 3 * (pKFi->mPrevKF->mnId) + 3);
VG2 = optimizer.vertex(maxKFid + 3 * (pKFi->mnId) + 2);
VA2 = optimizer.vertex(maxKFid + 3 * (pKFi->mnId) + 3);
}
else
{
VG1 = optimizer.vertex(4 * maxKFid + 2);
VA1 = optimizer.vertex(4 * maxKFid + 3);
}
g2o::HyperGraph::Vertex *VP2 = optimizer.vertex(pKFi->mnId);
g2o::HyperGraph::Vertex *VV2 = optimizer.vertex(maxKFid + 3 * (pKFi->mnId) + 1);
// 3.3 设置边
EdgeInertial *ei = new EdgeInertial(pKFi->mpImuPreintegrated);
ei->setVertex(0, dynamic_cast<g2o::OptimizableGraph::Vertex *>(VP1));
ei->setVertex(1, dynamic_cast<g2o::OptimizableGraph::Vertex *>(VV1));
ei->setVertex(2, dynamic_cast<g2o::OptimizableGraph::Vertex *>(VG1));
ei->setVertex(3, dynamic_cast<g2o::OptimizableGraph::Vertex *>(VA1));
ei->setVertex(4, dynamic_cast<g2o::OptimizableGraph::Vertex *>(VP2));
ei->setVertex(5, dynamic_cast<g2o::OptimizableGraph::Vertex *>(VV2));
g2o::RobustKernelHuber *rki = new g2o::RobustKernelHuber;
ei->setRobustKernel(rki);
// 9个自由度的卡方检验(0.05)
rki->setDelta(sqrt(16.92));
optimizer.addEdge(ei);
EdgeGyroRW *egr = new E 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 5203
5203











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











