







可逆运行需要系统能够产生正向和反向两种转矩:
1、 改变电动机的励磁φ方向;
2、 改变电枢电流的方向;
对于V-M 系统,由于晶闸管整流器的单向导电性能,不能产生反向电流,因此在晶闸管-直流电动机可逆系统中需要将两套整流器反并联给电动机供电:
VF : 正组整流器; Forward
VR: 反组整流器; Revert;
两组的几种工作状态:
1. 两组整流器都同时工作于整流状态。
在这种状态下,两组整流器的输出电压将顺向联接,会产生很大的环流(指不经过电动机,而在两组整流器中流通的电流),这是不允许的工作状态。
2. 一组整流器工作在整流状态,其控制角为α(0°≤α≤ 90°) ;另一组整流器工作在逆变状态,其控制角为β (0°≤β≤ 90°),且β= 180°-α。
1、 如果 α= β:
则两组整流器输出平均电压相等,没有直流环流,但由于两组整流器输出的瞬时电压仍可能不相等,还会产生瞬时脉动环流。
2、 如果 α〈β:
则整流组输出平均电压大于逆变组输出平均电压,则两组整流器间既有直流环流也会有瞬时脉动环流。
3、 如果 α〉β:
则整流组输出平均电压小于逆变组输出平均电压,不会产生直流环流,但仍会产生脉动环流。
以上为配合控制的有环流可逆系统。
3. 在一组整流器工作时(无论工作在整流还是逆变状态) ,另一组整流器不给触发脉冲:
则整流器不会导通,即处于封锁状态,这时两组整流器之间不可能有环流通路,既不会产生直流环流也不会产生脉动环流。
采用这种控制模式的可逆系统称无环流可逆系统。无环流可逆系统一般有逻辑元环流可逆调速系统和错位无环流可逆调速系统两种。
α = β 配合控制的有环流直流可逆调速系统:
1.主电路:
由两组三相桥式晶闸管全控型整流器反并联组成,并共用同一路三相电源。
2.平波电抗器:
采用 α= β配合控制方式,在两组整流器之间没有直流环流,但还存在脉动环流,为了限制脉动环流的大小,在主电路中串入了四个均衡电抗器Lc1~Lc4 ,用于限制脉动环流。
平波电抗器 Ld 用于减小电动机电枢电流的脉动,减小电枢电流的断续区,改善电动机的机械特性。
3.控制部分:
转速和电流的双闭环控制。
为了确保两组整流器的工作状态相反,电流调节器的输出分两路,一路经正组桥触发器 GTF 控制正组桥整流器,另一路经倒相器 AR 、反组桥触发器 GTR 控制反组桥整流器。
电路工作原理分析:
1. 系统的起动和运行过程:
与不可逆双闭环调速系统相同:
在突加给定信号 Un*为正时:
正组桥工作于整流状态,反组桥工作于逆变状态,由正组桥向电动机提供正向电流,电动机经历电流上升、恒流升速和转速调节三个阶段后,进入正转稳定运行阶段,反组桥仅有少量脉动环流通过。
在突加给定信号Un*为负时:
正组桥工作于逆变状态,反组桥工作于整流状态,由反组桥向电动机提供反向电流,电动机同样经历电流上升、恒流升速和转速调节三个阶段后,进入反转稳定运行阶段,而正组桥仅有少量脉动环流。
2. 反转制动过程:
电动机反转需要改变转矩的方向,由Te= Ctφld 改变转矩方向即需要改变电枢电流的方向。由于电枢回路存在着电感,电枢电流的流向改变则要经历电流的下降,和反向电流上升和建立的过程。由于电感是储能元件,电感储能与电流有关 QL=Lid2 /2, 因此电流下降就意味着电感储能的释放,电流上升就意味着电感的储能增加的过程。因此,电动机的反转制动过程可以分为本桥逆变、反接制动(反向建流)和回馈制动三个主要阶段:
(1) 本桥逆变阶段:
在这阶段中正转回路的电感释放能量,正向电流下降直到零,电动机转速基本不变(因为电感释放能量,维持转动)。
1. 当转速给定由正变负时,转速调节器的输出即电流调节器的输入Ui*改变极性,从而电流调节器的输出Uc改变符号,使正组桥从整流改变为逆变状态;
2. 反组桥从逆变改变为整流状态,正转回路的电感能量释放,由电感反电动势 e L = L∑di/dt 维持电枢正转回路电流的流通,电动机的正向电流下降,电感储能经正组桥(逆变状态)流向交流电源,而反组整流器由于不能通过反向电流,除少量脉动环流外,没有负载电流通过,处于待整流状态。
(2) 反接制动阶段:
当电动机的正向电流下降到零后,电感反电动势作用消失,处于整流状态的反组整流器开始输出电流,电枢电流开始反向,由于整流器输出电压与电动机反电动势的方向相同,电动机处于反接制动状态,电流上升很快。在这阶段中,电动机的转速开始下降,反向电流开始上升,正组整流器同样由于不能通过反向电流,除少量脉动环流外,没有负载电流通过,处于待逆变状态,电感的储能开始增加。
(3) 回馈制动阶段:
在反接制动阶段中由于电流上升很快,当电流反馈大于电流给定值时,电流调节器的输出 Uc 又改变极性,使正组整流器处于整流状态,反组整流器处于逆变状态。
这时由于电枢反电动势与整流器输出电压反向相反,且电枢反电动势大于整流器输出电压,这时回路的电流由电枢电动势产生,且经反组整流器(逆变状态)流向交流电源,电动机进入发电回馈制动阶段。
这阶段的特点是:
电动机转速不断下降,电动机的惯性储能经反组整流器回输电网,产生良好的节能效果。随着转速的下降,电枢电动势也不断下降,但由于转速调节器的输出在电动机转速没有反向超调时,始终保持着最大限幅状态,这时电流调节器发挥作用,维持电动机以最大电流回馈制动,即电流调节器的输出随转速的下降而减小,相应晶闸管的控制角不断加大,整流器输出电压随之减小,从而保持最大的制动电流,取得最快的制动效果。
α= β控制的有环流可逆调速方式,在实际应用中由于难以准确保持α= β的状态,一旦出现 α≠ β时,就有可能产生直流环流,使整流器过载或损坏,故实际上并不采用。
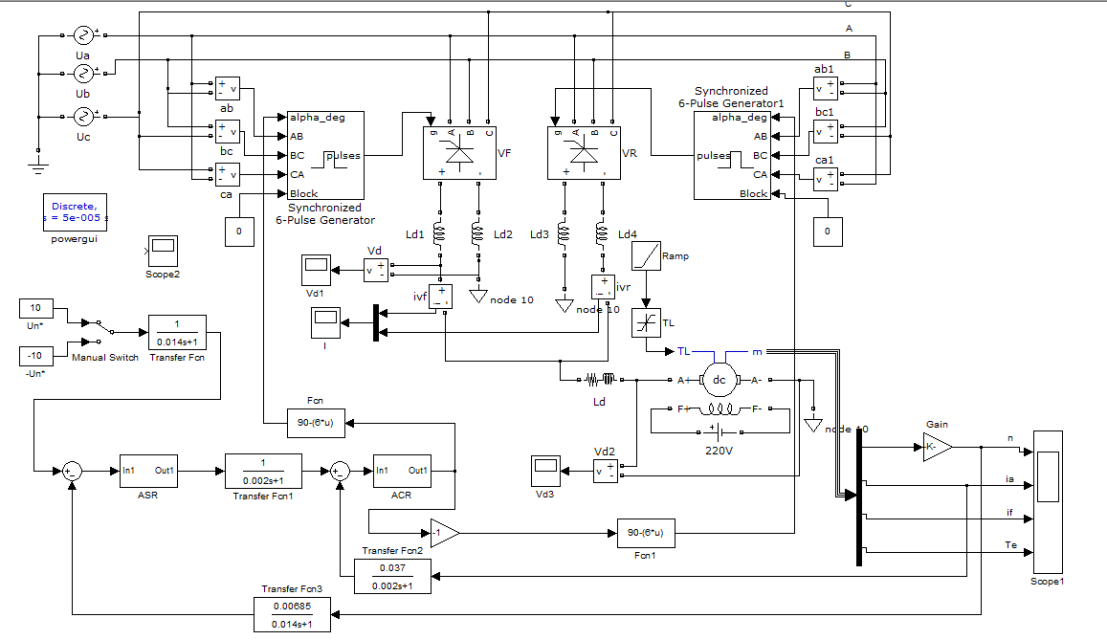
α = β 配合控制的有环流直流可逆调速系统的仿真:
组成元件和参数:
一、主电路:
1.交流电源:
Ua = Ub = Uc = 160V (Peak Value) , f = 50Hz;
2.两组反并连接的整流器:
VF、VR;采用晶闸管三相全桥整流相位控制;
3.触发器:
6 – pulse、6 – pulse1;
输入为三相线电压,输出为控制角,并设定最小的控制角α = 30°;
4.环流电抗器:
Ld1 ~ Ld4 : 0.002H;
5.平波电抗:
Ld = 0.015H;
6.电动机:
Ra = 0.21 , La = 0.000543H, Ua = 220V, Uf = 220V,
Rf = 14.7 , Lf = 0, Laf = 0.084H, J = 2.29kg*m^2;
二、控制回路:
1.转速给定:
Un*max = ± 10V;
并且可通过切换开关切换,来选择电机转向;
2.转速调节器ASR:
Kp = 11.7,Kn = 134.5 ;
积分输出限幅为:±12V,ASR输出限幅为±10V;
3.电流调节器ACR:
Kp = 5.013,Kn = 33.8 ;
积分输出限幅为:±12V,ASR输出限幅为±10V;
4.倒向器:
为增益是 – 1 的放大器;
5.移相控制模块:
采用90 - ( u – 60 )的相控特性,并限制最大α角为30°;
6.转速、电流反馈:
转速反馈系数: α= 10/1460 ≈ 0.00685;
电流反馈系数: β = 10/270 ≈ 0.037;
且对于每个输入和输出有不同的惯性常数,这里不再赘述;
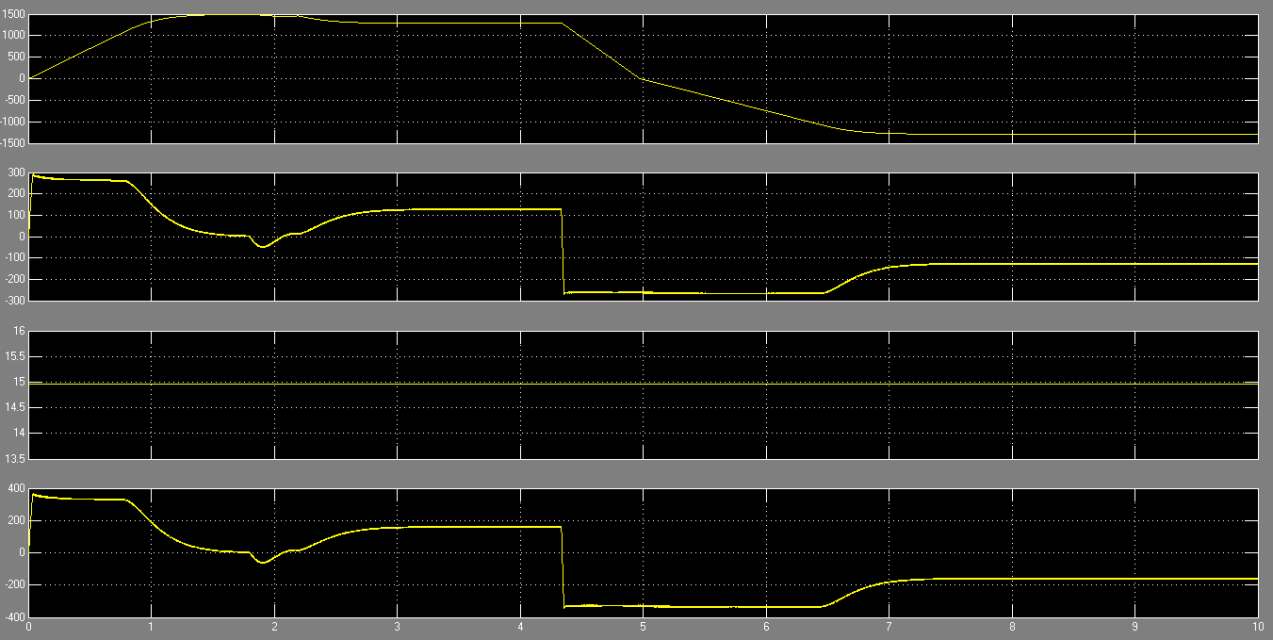
结果分析:
先是正组启动,在2.2秒突加负载160N*m, 且在4.35秒左右时手动切换运行方向;
当转速为反方向时,负载转矩也应当改变方向,即恒转矩负载;
在仿真中用饱和以及Ramp函数和转速的乘积来判断方向;
仿真一共经过了十秒钟时间:
0 ~ 1.5s 为正转启动过程;
2.2~4.35s 为系统的加载过程;
4.35~10s 为系统的反转过程:
1. 对于启动过程:
系统经历了电流上升,恒流升速,转速调节三个阶段;
在转速超调后电流迅速下降并且出现负向电流,这与不可逆调速系统的 起动过程不同,因为不可逆调速系统不能产生反向电流,而可逆系统反转整 流器可以提供反向电流,并加快起动的调节过程。因为是理想空载起动,起 动结束时电枢电流为零。
2. 在2.2s时,电机加上负载:
转速发生波动,经过不到一秒钟的调整时间,系统就已经达到新的平衡, 转速基本恢复正常;
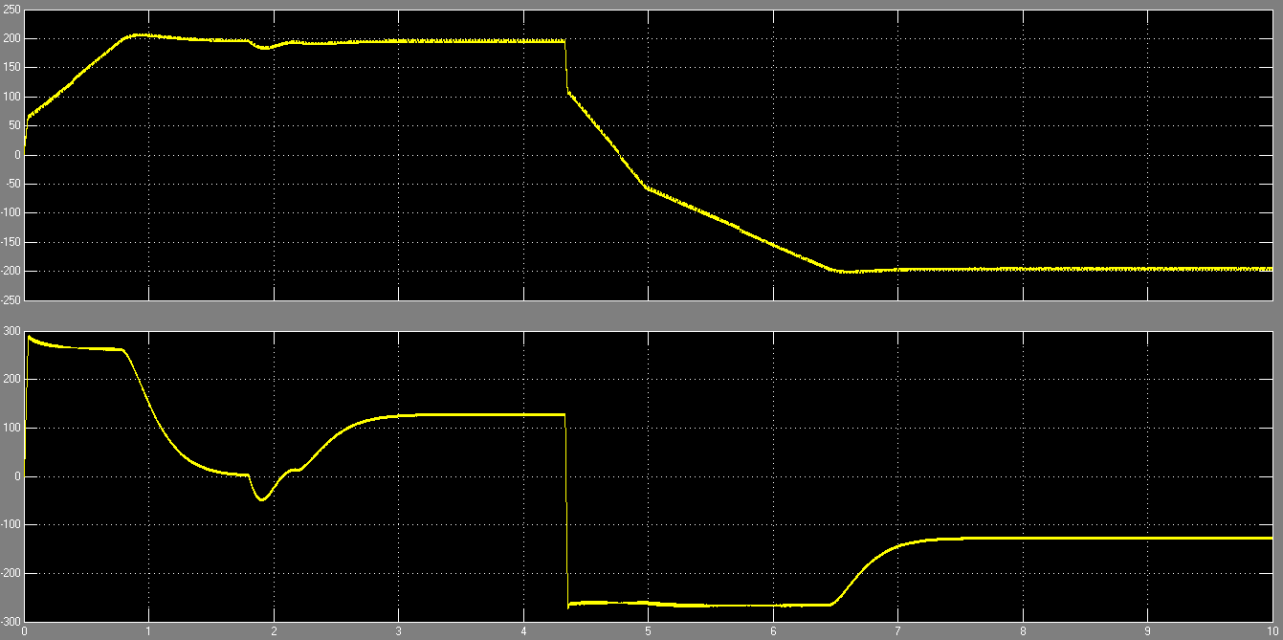
3. 在启动后4.35s转速给定从正变为负,系统进入反转调节状态:
首先,电枢电流迅速改变方向,从正最大值变为负最大值;此后,电动机转速也由正变为负,共经历了本桥逆变和反接制动两个阶段;
从 4.35s 反转过程开始到 4.36s 时间内,电动机的正向电流下降,转速没有太大的变化,平波电感的反电动势为负,与电动机电枢反电动势方向相反,且平波电感的反电动势大于电动机电枢电动势,因此是平波电感储能释放,维持电动机的正向电流。这时,仍是正组桥导通,其控制角为β,系统进入了本桥逆变阶段。
在 4.36s 之后,电枢电流开始改变方向,并反方向增加,反组桥进入整流,系统开始反接制动阶段,电动机转速下降。
在 4.37s 左右,电流开始反向超调,这时在系统电流环的调节下反组整流器变为逆变状态,转速和电动机反电动势进一步减小,电动机的惯性储能释放,并经反组整流器流回电网,这是系统的回馈制动阶段。
在 5s 转速下降为零时,回馈制动阶段结束,系统叉开始反向恒流起动过程,直到电动机进入反转的稳定运行阶段。
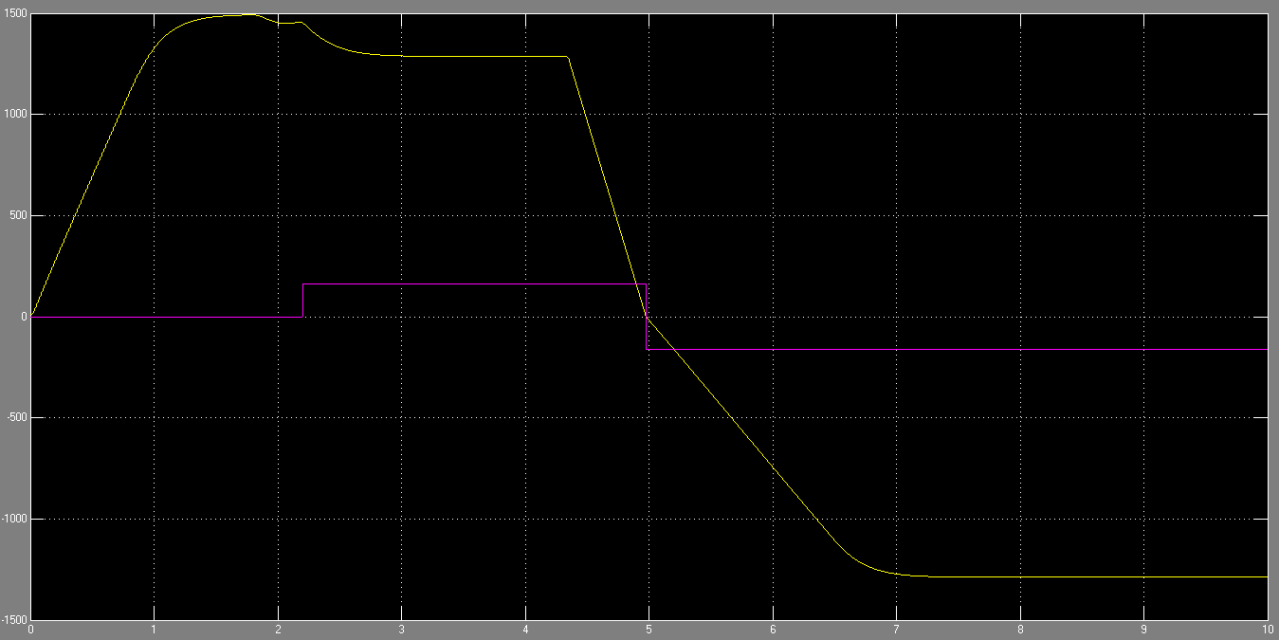
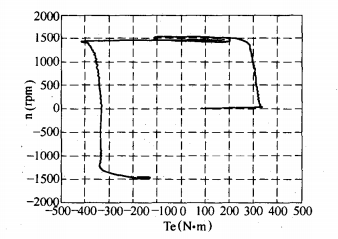
从机械特性可以看到正反转过程经历了特性的三个象限:
第一象限:
电动机工作于正转电动状态并在起动过程中电动机基本保持了最大转矩的升速;
第二象限:
电动机转矩变为负,转速减小,电动机工作于正转发电制动状态;这时电动机转速迅速下降到零;
第三象限:
电动机以最大反向转矩反向升速,最后稳定在反转工作点上,因为转速转矩均为负,所以电动机工作在反转电动状态。
1_Layout:
2
3
4
5


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









