







转速电流双闭环的直流调速系统:
双闭环控制直流调速系统的特点是:
电动机的转速和电流分别由两个独立的调节器分别控制,且转速调节器的输出就是电流调节器的给定,因此电流环能够随转速的偏差调节电动机电枢的电流。
当转速低于给定转速时:
转速调节器的积分作用使输出增加,即电流给定上升,并通过电流环调节使电动机电流增加,从而使电动机获得加速转矩,电动机转速上升。
当实际转速高于给定转速时:
转速调节器的输出减小,即电流给定减小,并通过电流环调节使电动机电流下降,电动机将因为电磁转矩减小而减速。
当转速调节器饱和输出达到限幅值时:
电流环即以最大电流限制 Idm 实现电动机的加速,使电动机的起动时间最短,在可逆调速系统中实现电动机的快速制动。
在不可逆调速系统中,由于晶闸管整流器不能通过反向电流,因此不能产生反向制动转矩而使电动机快速制动。
比例和积分调节分为两个通道,其中积分调节器 integrate 的限幅表示调节器的饱和限幅值,而调节器的输出限幅值由饱和模块 Saturation设定。
调节器用作转速调节器 ASR 时,在起动中由于开始转速偏差大,调节器输出很快达到输出限幅值,在转速超调后首先积分器退饱和,然后转速调节器输出才从限幅值开始下降。
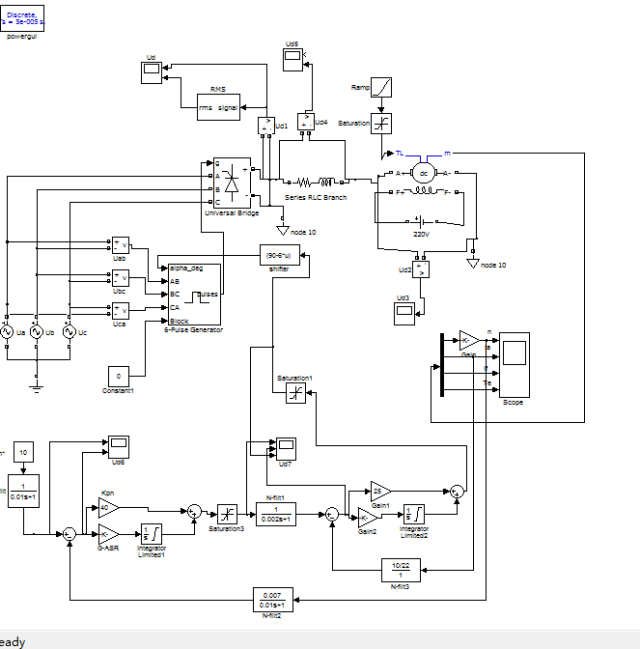
利用Power System模块的直流双闭环系统仿真:
转速反馈和电流反馈均取自电动机测量单元的转速和电流输出端,减少了测速和电流检测环节;
电流调节器 ACR 的输出端接移相特性模块 shifter 的输入端,而电流调节器 ACR 的输出限幅就决定了控制角的 αMIN 和 αMAX 限制。
1、参数:
整流部分:
供电电源 Ua = Ub = Uc = 123sqrt(2) V
整流器最小角度 α = 30°
整流电压 Uo ≈ Ud = 200V;
输出平波电抗器 L = 0.2 ; R = 0.004 ( 不带电阻时,MATLAB计算可能不收敛 )
电机参数:
电枢电阻: Ra = 0.21 La = 0.000021H
励磁回路: Rf = 146.7 Lf = 0H ( 稳态分析时可取为零 )
电枢互感: Laf = 0.84H
转动惯量: J = 0.2 Kg * m^2
额定转速: nN = 1500r/min
额定负载转矩: Tn = 22N*m
电动势(转矩)常数: Ce = 0.132 V/(r/min) CT = 0.55Ce
控制部分参数:
给定电压: Uct = 10V;
输入给定时间常数 Ton = 0.01s
转速环:
放大倍数 Pasr = 40,
积分时间常数 Tasr = 0.02
积分上限幅值 Vmax = 12V
输出限幅 Vi*max = ±10V
输出时间常数 Tasr = 0.002s
转速反馈系数 α = 10/1500
电流环:
放大倍数 Pacr = 25;
积分时间常数 Tacr = 0.004
积分上限幅值 Vmax = 12V
输出限幅 Vct*max = ±10V
电流反馈系数 β = 10/22 ( 忽略反馈时间常数 )
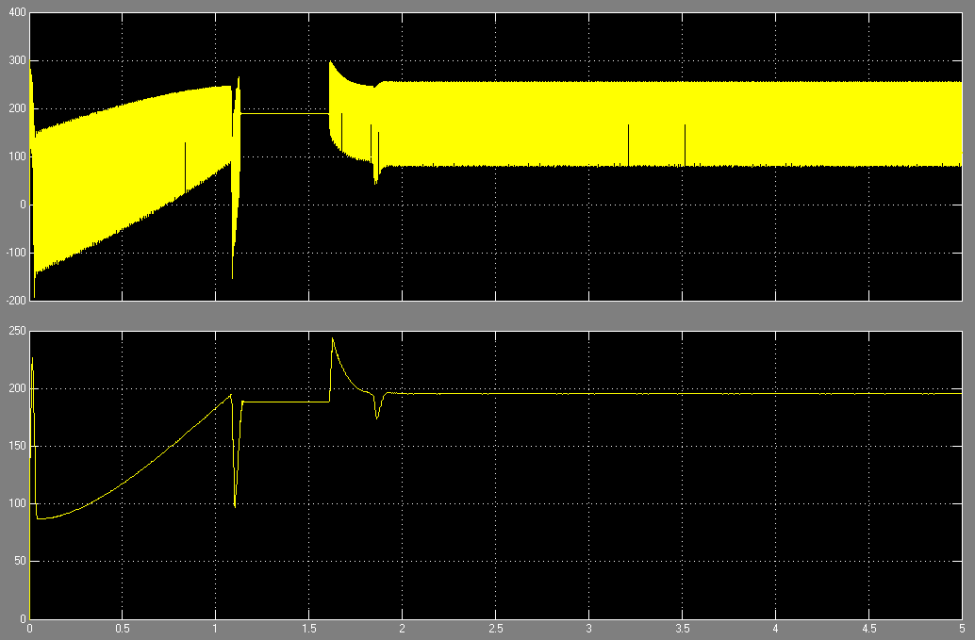
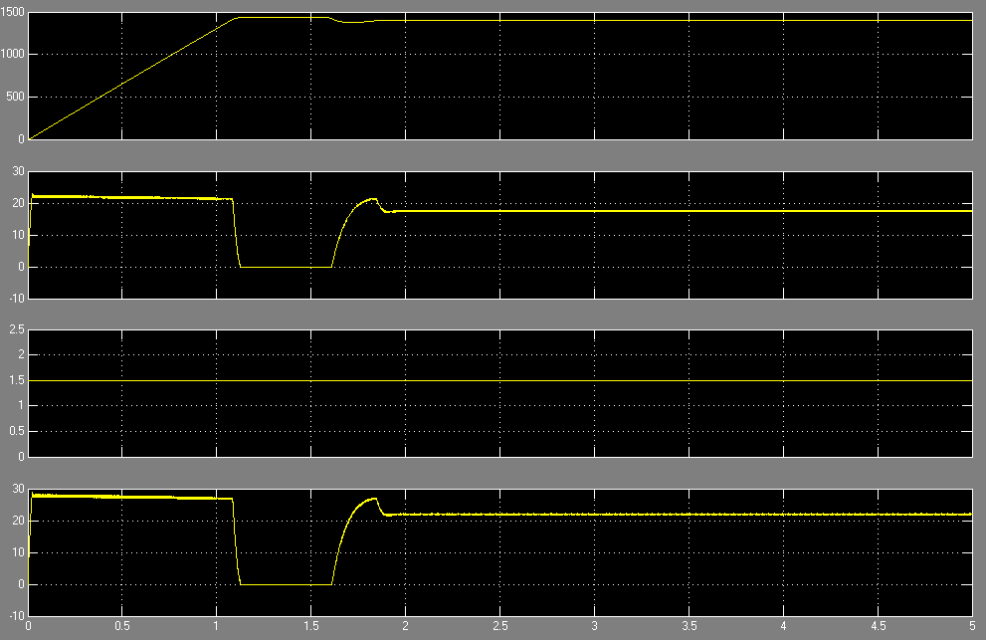
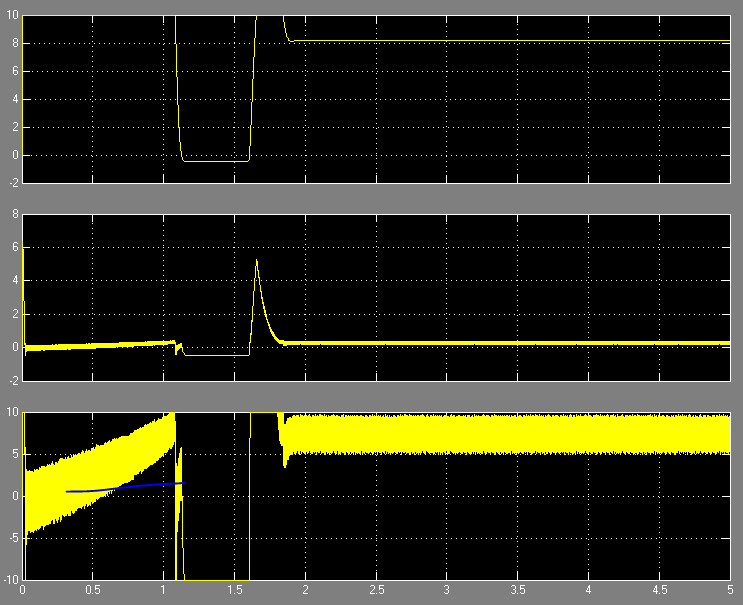
结果分析:
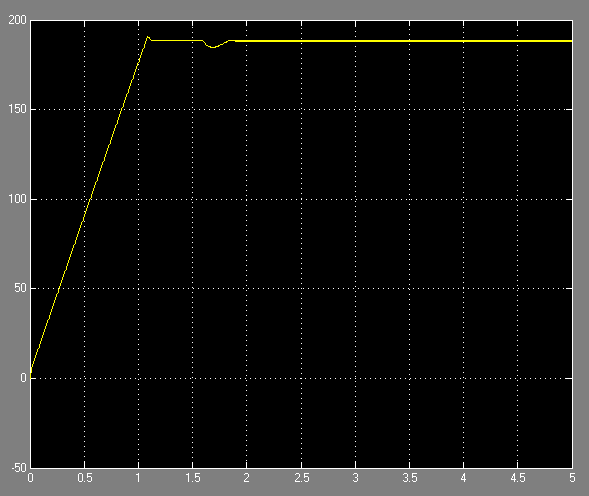
1. 从转速和电流被形可以看到:在起动阶段电动机以恒流起动,在 1.1s 时起动过程结束,电枢电流下降到0,转速上升到最高且大于 1450r/min
2. 1.6s时加上负载,电动机转速下降, ASR 开始退饱和,电流环发挥调节作用,使电动机稳定在给定转速上。
3. 由上可见,当加入负载后稳态速降很小,且在启动时基本可以保持为最大电流,所以启动速度也很快。
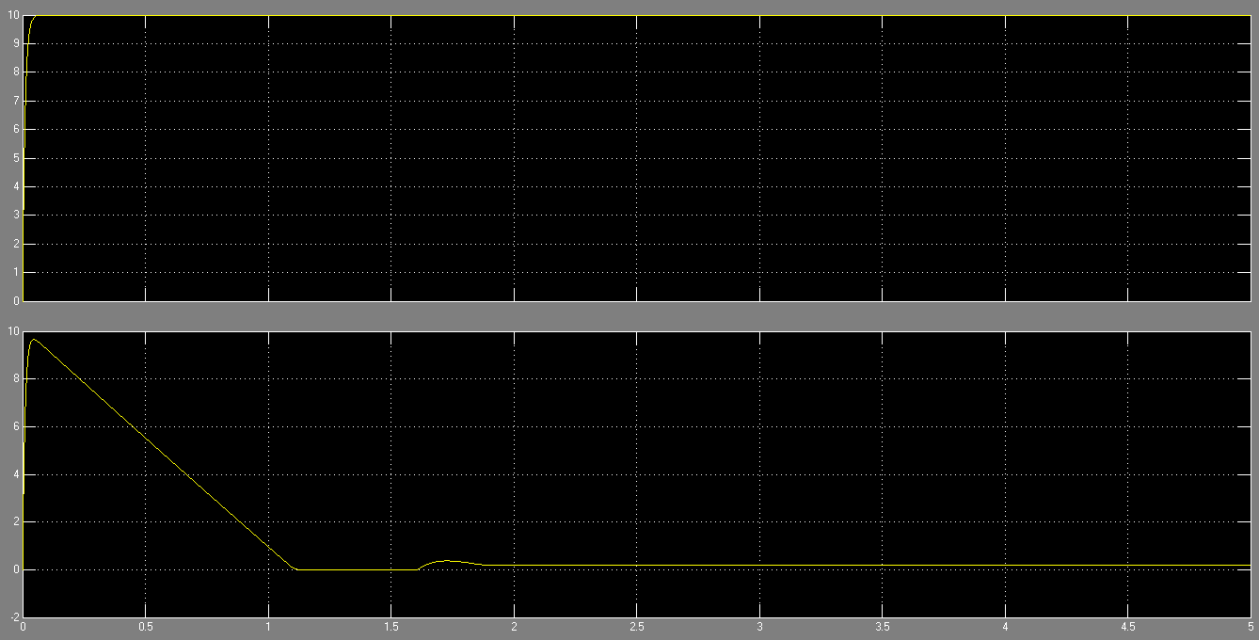
4. 当减小ASR的放大倍数时,由理论分析可知,加入负载后的额定速降将增大:( 例如Kp减小为5 )
1_Layout:
2
3
4
5
6
7


















 36
36

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









