







一、主要功能
本项目使用Proteus8仿真Arduino单片机控制器,使用LCD1602液晶模块、按键模块、雨滴传感器、ADC、LED模块等。
主要功能:
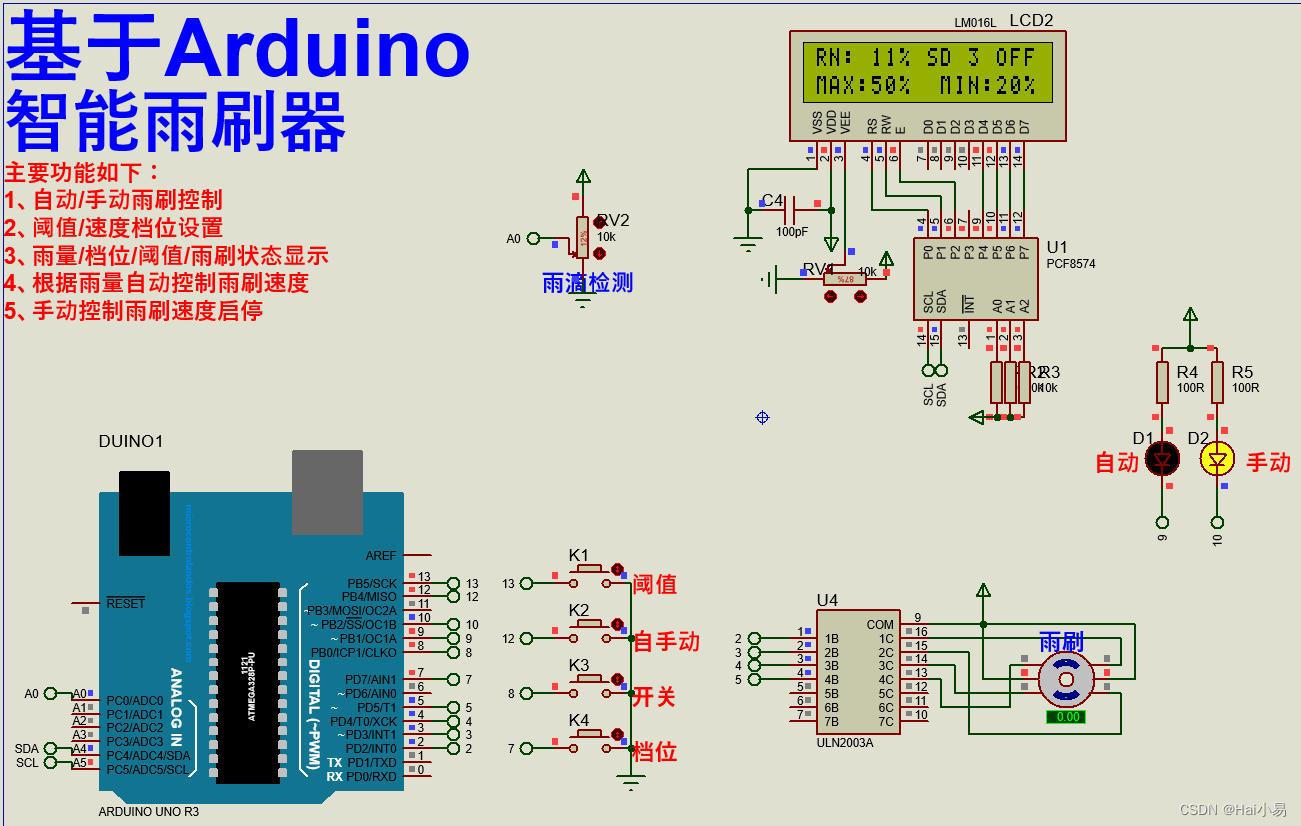
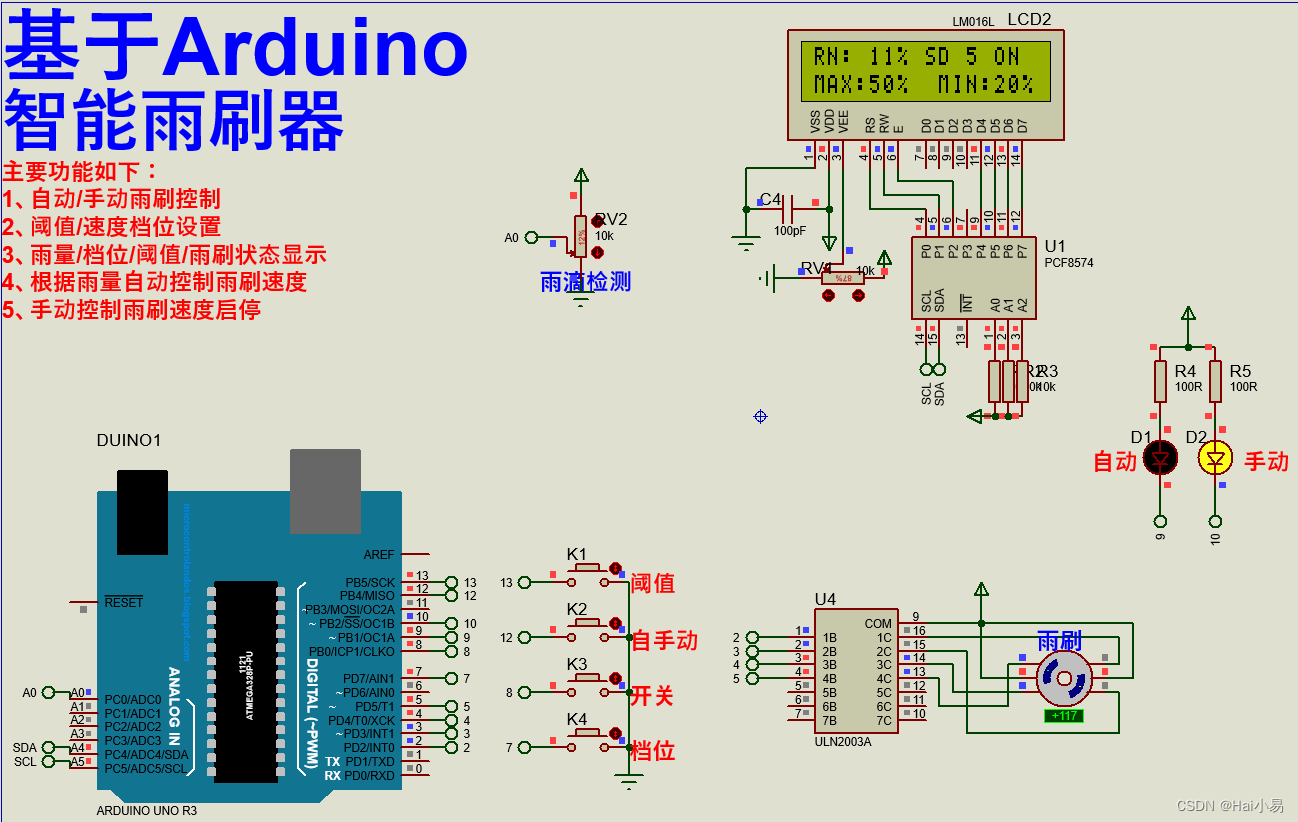
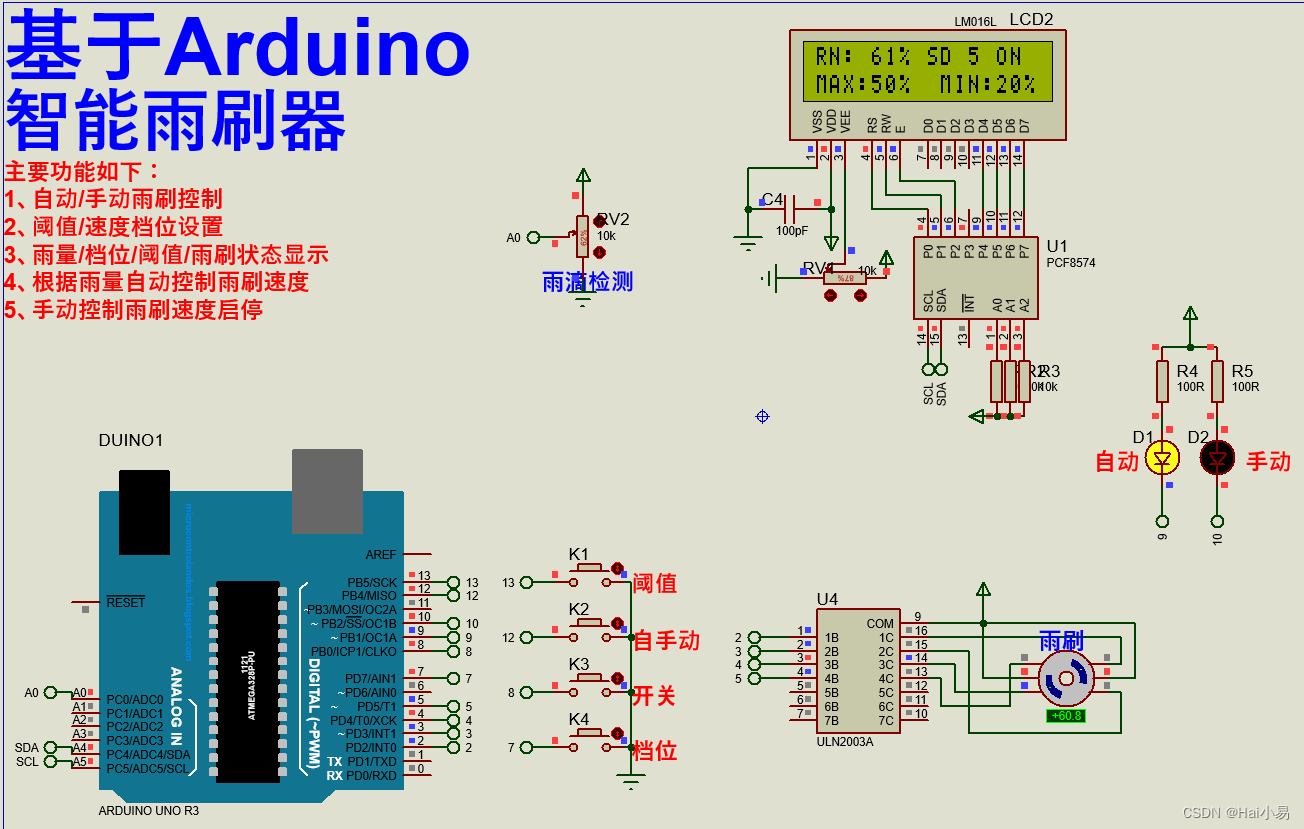
系统运行后,LCD1602显示雨刷器当前模式、雨量、档位和状态。
默认工作在手动模式,对应手动模式指示灯亮,K3键可控制雨刷启动和停止,可通过K4键调节雨刷档位速度。当按下K2键切换为自动模式,此时自动模式指示灯亮,若检测雨滴量值在阈值范围内,根据对应值匹配到速度档位运行,若超过最大值,则以最高速运行,若低于最低值,则关闭雨刷。可通过K1键设置阈值范围,K2和K3键进行加减调节。 系统整个过程会在LCD1602液晶上显示对应的速度档位、雨刷状态,雨量值和手动/自动模式。
主要功能:
按键控制:自动/手动切换,设定雨量阈值、速度等;
显示控制:LCD1602显示雨量、档位、阈值、雨刷状态等;
驱动电路:使用ULN2003控制步进电机模拟雨刷转动;
检测电路:使用传感器检测当前雨量,通过ADC转换;
调速控制:根据雨量大小控制雨刷转动速度;
自动模式:自动模式根据雨量自动控制;
手动模式:通过按键控制雨刷启停、速度。
二、硬件资源
1、Arduino单片机核心模块
2、LCD1602液晶模块
3、雨滴传感器、ADC模块
4、按键、LED模块
5、步进电机驱动模块
三、软件设计
/*
作者:嗨小易(QQ:3443792007)
*/
//参数初始化
void sys_parm_init(void)
{
sys_ctrl.dir=0;
sys_ctrl.gear=3;
sys_ctrl.run=0;
sys_ctrl.ad_valh=50;
sys_ctrl.ad_vall=20;
sys_ctrl.mode=0;
sys_ctrl.setflag=0;
sys_ctrl.zeroflag=1;
}
//系统初始界面显示
void sys_open_show(void)
{
lcd1602_clear();
lcd1602_show_string(0,0,"RN: %");
lcd1602_show_string(8,0,"SD");
lcd1602_show_string(11,0," ");
lcd1602_show_string(13,0,"OFF");
lcd1602_show_string(0,1,"MAX: %");
lcd1602_show_string(9,1,"MIN: %");
//初始手动模式
SD_LED=0;ZD_LED=1;
}
//系统参数获取
void sys_parm_get(void)
{
while(1)
{
//读取雨量AD值
sys_ctrl.ad_val=pcf8591_read_adcvalue(0);
//将范围0-255映射到0-100
sys_ctrl.ad_val=cal_map(sys_ctrl.ad_val,0,255,0,100);
break;
}
}
//系统参数设定
void sys_parm_set(void)
{
u8 key=0;
key=key_scan(0);
//阈值设置
if(key==KEY1_PRESS)
{
sys_ctrl.setflag++;
if(sys_ctrl.setflag>=3)sys_ctrl.setflag=0;
sys_ctrl.run=0;
if(sys_ctrl.run)lcd1602_show_string(13,0,"ON ");
else lcd1602_show_string(13,0,"OFF");
}
//上限设置
if(sys_ctrl.setflag==1)
{
if(key==KEY2_PRESS)//加
{
sys_ctrl.ad_valh++;
if(sys_ctrl.ad_valh>=100)sys_ctrl.ad_valh=0;
}
else if(key==KEY3_PRESS)//减
{
sys_ctrl.ad_valh--;
if(sys_ctrl.ad_valh<=0)sys_ctrl.ad_valh=99;
}
lcd1602_show_string(4,1," ");
}
//下限设置
if(sys_ctrl.setflag==2)
{
if(key==KEY2_PRESS)//加
{
sys_ctrl.ad_vall++;
if(sys_ctrl.ad_vall>=100)sys_ctrl.ad_vall=0;
}
else if(key==KEY3_PRESS)//减
{
sys_ctrl.ad_vall--;
if(sys_ctrl.ad_vall<=0)sys_ctrl.ad_vall=99;
}
lcd1602_show_string(13,1," ");
}
//未设置阈值
if(sys_ctrl.setflag==0)
{
//雨刷开启/关闭
if(key==KEY3_PRESS)
{
sys_ctrl.run=!sys_ctrl.run;
if(sys_ctrl.run)lcd1602_show_string(13,0,"ON ");
else lcd1602_show_string(13,0,"OFF");
}
//自动/手动模式切换
else if(key==KEY2_PRESS)
{
sys_ctrl.mode=!sys_ctrl.mode;
if(sys_ctrl.mode){SD_LED=1;ZD_LED=0;}
else {SD_LED=0;ZD_LED=1;}
sys_ctrl.run=0;
if(sys_ctrl.run)lcd1602_show_string(13,0,"ON ");
else lcd1602_show_string(13,0,"OFF");
}
//手动模式下档位调节
if(sys_ctrl.mode==0)
{
if(key==KEY4_PRESS)
{
sys_ctrl.gear++;
if(sys_ctrl.gear>=6)sys_ctrl.gear=1;
}
}
}
}
//系统参数显示
void sys_parm_show(void)
{
while(1)
{
//雨量值显示
lcd1602_show_nums(3,0,sys_ctrl.ad_val,3,0);
//雨量阈值显示
lcd1602_show_nums(4,1,sys_ctrl.ad_valh,2,0);
lcd1602_show_nums(13,1,sys_ctrl.ad_vall,2,0);
//档位显示
lcd1602_show_nums(11,0,sys_ctrl.gear,1,0);
break;
}
}
//系统参数控制
void sys_parm_ctrl(void)
{
static u16 i=0;
u16 len=0;
//手动模式
if(sys_ctrl.mode==0)
{
//雨刷开启后,以初始档位运行
if(sys_ctrl.run)
{
i++;
if(i==1)
{
step_motor_28BYJ48_send_pulse(4,0,gspeed[sys_ctrl.gear-1],1,sys_ctrl.run);
sys_ctrl.zeroflag=0;
}
if(i==3)
{
i=0;
step_motor_28BYJ48_send_pulse(4,1,gspeed[sys_ctrl.gear-1],1,sys_ctrl.run);
sys_ctrl.zeroflag=1;
}
}
//雨刷关闭
else
{
step_motor_28BYJ48_send_pulse(4,1,gspeed[sys_ctrl.gear-1],1,sys_ctrl.run);
}
}
//自动模式
else
{
if(sys_ctrl.run)lcd1602_show_string(13,0,"ON ");
else lcd1602_show_string(13,0,"OFF");
//采集雨水量大于上限值,已最高档位运行雨刷
if(sys_ctrl.ad_val>=sys_ctrl.ad_valh)
{
sys_ctrl.gear=5;//最高档位
sys_ctrl.run=1;
i++;
if(i==1)
step_motor_28BYJ48_send_pulse(4,0,gspeed[sys_ctrl.gear-1],1,sys_ctrl.run);
if(i==3)
{
i=0;
step_motor_28BYJ48_send_pulse(4,1,gspeed[sys_ctrl.gear-1],1,sys_ctrl.run);
}
}
//采集雨量小于下限值,雨刷停止
else if(sys_ctrl.ad_val<=sys_ctrl.ad_vall)
{
sys_ctrl.run=0;
step_motor_28BYJ48_send_pulse(4,1,gspeed[sys_ctrl.gear-1],1,sys_ctrl.run);
}
//在阈值范围内,根据雨量大小自动调节速度
else
{
sys_ctrl.run=1;
len=(sys_ctrl.ad_valh-sys_ctrl.ad_vall)/3;
if(sys_ctrl.ad_val>sys_ctrl.ad_vall && sys_ctrl.ad_val<=sys_ctrl.ad_vall+len)
{
sys_ctrl.gear=1;
}
else if(sys_ctrl.ad_val>sys_ctrl.ad_vall+len && sys_ctrl.ad_val<=sys_ctrl.ad_vall+2*len)
{
sys_ctrl.gear=2;
}
else if(sys_ctrl.ad_val>sys_ctrl.ad_vall+2*len && sys_ctrl.ad_val<=sys_ctrl.ad_vall+3*len)
{
sys_ctrl.gear=3;
}
else if(sys_ctrl.ad_val>sys_ctrl.ad_vall+3*len && sys_ctrl.ad_val<=sys_ctrl.ad_vall+4*len)
{
sys_ctrl.gear=4;
}
i++;
if(i==1)
step_motor_28BYJ48_send_pulse(4,0,gspeed[sys_ctrl.gear-1],1,sys_ctrl.run);
if(i==3)
{
i=0;
step_motor_28BYJ48_send_pulse(4,1,gspeed[sys_ctrl.gear-1],1,sys_ctrl.run);
}
}
}
}
//应用控制系统
void appdemo_show(void)
{
sys_parm_init();//系统参数初始化
lcd1602_init();//LCD1602初始化
sys_open_show();//系统初始界面显示
while(1)
{
sys_parm_set();
sys_parm_get();
sys_parm_show();
sys_parm_ctrl();
}
}
四、实验现象
B站演示视频:https://space.bilibili.com/444388619
联系作者
B站演示视频:https://space.bilibili.com/444388619
专注于51单片机、STM32、国产32、DSP、Proteus、ardunio、ESP32、物联网软件开发,PCB设计,视频分享,技术交流。















 2591
2591











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









