







 本文介绍如何在NS3中实现基于事件和时间的拥塞控制算法,并将其与Gym环境结合,通过多线程和protobuf通信,使Python脚本能够控制和观测NS3模拟的TCP环境。
本文介绍如何在NS3中实现基于事件和时间的拥塞控制算法,并将其与Gym环境结合,通过多线程和protobuf通信,使Python脚本能够控制和观测NS3模拟的TCP环境。
tcp-rl
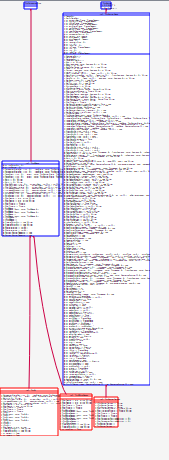
由于并不知道怎么在understand里面把部分uml折叠起来,所以只能先截成这么小…大了传不上来(最长的那个是TcpSocketBase which其实在这里不是重点…)
左边竖着的,中间的蓝色的是TcpRlBase,继承了TcpCongestionOpns,说明这个类是个拥塞控制的类
- 我们来看看下面三个小图
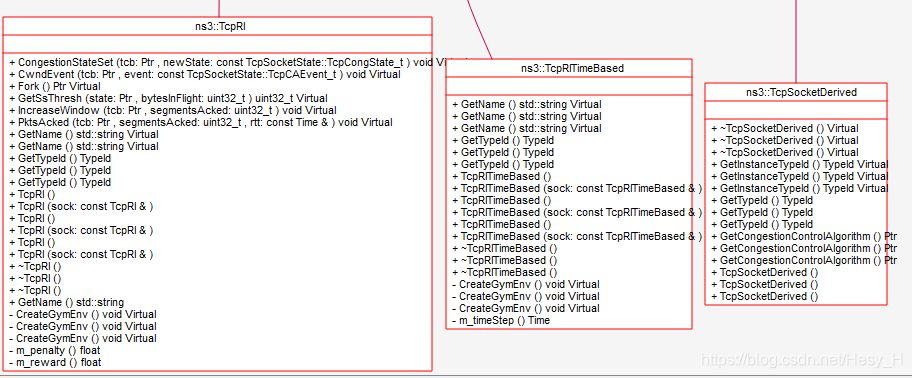
TcpRL和TcpRlTimeBased分别是基于事件和基于时间的CC ,在这里,CC实际上就是一个Agent的代表了【但实际上C语言部分Agent的动作还是在tcp-env里面实现的】。 - TcpSocketDerived继承了TcpSocketBase说明他是一个TcpSocket,他的用处实际上是在 rl-tcp-env 中被调用(调用它的GetCongestionControlAlgorithm),用来识别哪个是我们要监视的Agent.
tcp-rl-env
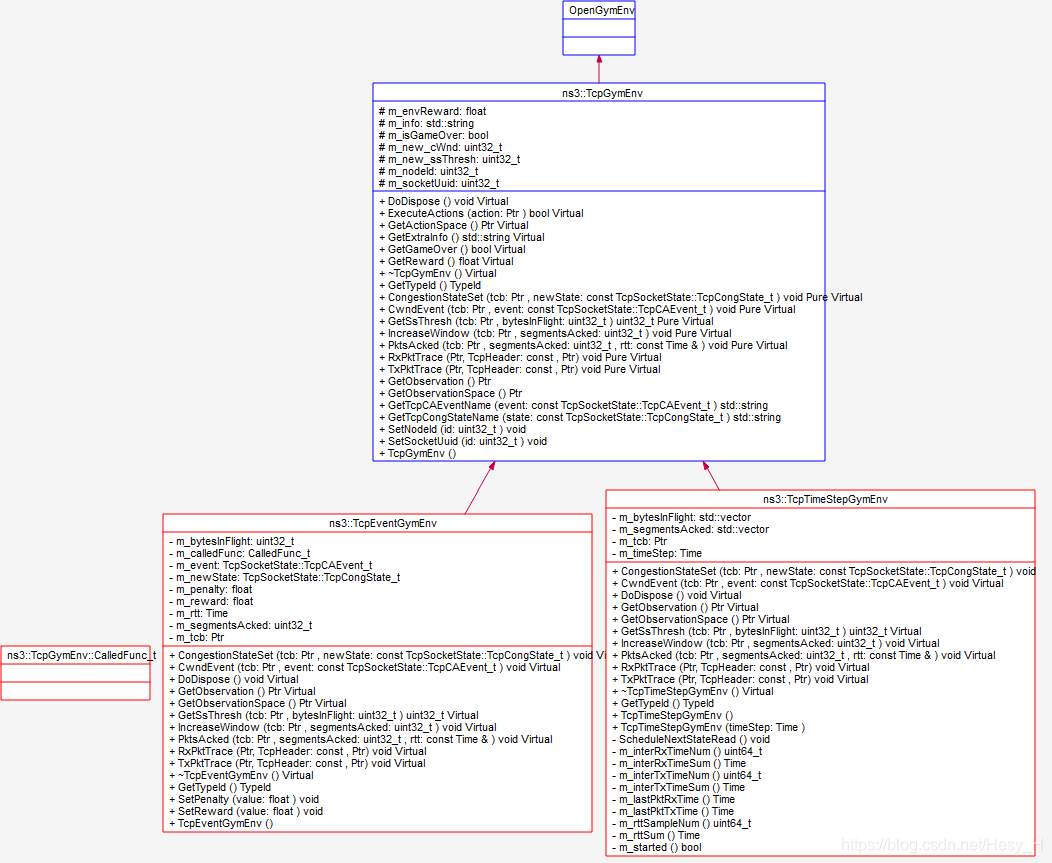 在sim.cc中要创建OpenGym的Object ptr,这个就是ptr指向的两个类,也是基于事件和时间,和两个Agent类相对应。
在sim.cc中要创建OpenGym的Object ptr,这个就是ptr指向的两个类,也是基于事件和时间,和两个Agent类相对应。
-
一方面,实现了white paper里面要求的七个接口(GetObservationSpace、GetObservation、ExecuteMyAction之类的),还定义了一些回调函数和绑定的过程。
-
注意,这里的TcpGymEnv是一个抽象类,只是用于提供一个接口。具体可以看我另一篇博文:纯虚函数与虚函数
总体思路梳理
- ns3 的C脚本给我们创建了一个动态的环境,但是它这个环境的变量和形式和Gym不是一致的,可是很多人习惯使用Gym的类以及python编程,所以ns3-gym实际上是使用了多线程的方式,基于google的protobuf进行c脚本和python脚本的通信,c这边是进行真实的模拟,然后利用中间件ns3Env,将环境封装成Gym的形式传送给python脚本,python脚本中也会则会使用Gym的接口形式(env.step(),env.get_action() 等 ),实际上也通过中间件再把相应的动作和更新传给ns3,ns3就接着在他的小世界中进行模拟了。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









