






线性回归模型函数和损失函数
线性回归模型
线性回归是机器学习中最基本的问题模型了,线性回归遇到的问题一般是这样的。我们有m个样本,每个样本对应n维特征和一个结果输出,如下:
(
x
1
(
0
)
,
x
2
(
0
)
,
.
.
.
x
n
(
0
)
,
y
0
)
,
(x_1^{(0)},x_2^{(0)},...x_n^{(0)},y_0),
(x1(0),x2(0),...xn(0),y0),
(
x
1
(
1
)
,
x
2
(
1
)
,
.
.
.
x
n
(
1
)
,
y
1
)
(x_1^{(1)},x_2^{(1)},...x_n^{(1)},y_1)
(x1(1),x2(1),...xn(1),y1)
.
.
.
(
x
1
(
m
)
,
x
2
(
m
)
,
.
.
.
x
n
(
m
)
,
y
m
)
...(x_1^{(m)},x_2^{(m)},...x_n^{(m)},y_m)
...(x1(m),x2(m),...xn(m),ym)
我们的问题是对于一个新的
(
x
1
,
x
2
,
.
.
.
x
n
)
(x_1,x_2,...x_n)
(x1,x2,...xn)它所对应的
y
y
y是多少呢?如果这个问题当中y是连续的,就是一个回归问题,否则就是一个分类问题
对于n维特征的样本数据,如果我们决定使用线性回归,那么对应的模型应该是:
h
θ
(
X
)
=
θ
0
+
θ
1
x
1
+
.
.
.
θ
n
x
n
,
h_{\theta}(X) = \theta_0 + \theta_1 x_1 + ...\theta_n x_n,
hθ(X)=θ0+θ1x1+...θnxn,
θ
i
\theta_i
θi是模型的参数.我们增加一个
x
0
=
1
x_0 = 1
x0=1则可以化简为
h
θ
(
X
)
=
∑
i
=
1
n
θ
i
x
i
h_{\theta}(X) = \sum_{i = 1}^n \theta_i x_i
hθ(X)=∑i=1nθixi
h
t
h
e
t
a
(
X
)
=
X
θ
h_{theta}(X) = X\theta
htheta(X)=Xθ ,X是一个
m
×
n
m\times n
m×n 的矩阵.
损失函数
一般线性回归我们使用均方误差作为损失函数。

线性回归算法
对于线性回归的损失函数$ J(\theta) = \frac{1}{2} (X\theta - Y)^T(X\theta -Y)$我们常用两种方法来求损失函数最小化的方法,一个是梯度下降法,一个是最小二乘法(其实还有一种是牛顿迭代法).这里直接给出二者的迭代公式.
梯度下降:
θ
=
θ
−
α
X
T
(
X
θ
−
Y
)
\theta =\theta - \alpha X^T(X\theta - Y)
θ=θ−αXT(Xθ−Y)
最小二乘法:
θ
=
(
X
T
X
)
−
1
X
T
Y
\theta = (X^TX)^{-1}X^TY
θ=(XTX)−1XTY
最小二乘法与梯度下降
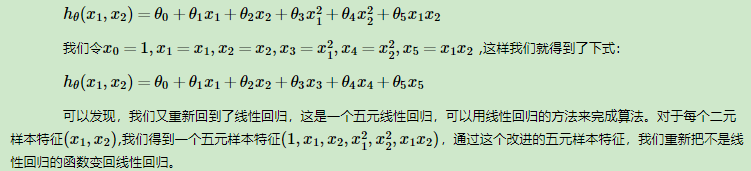
##线性回归的推导:(多项式回归)
回到我们开始的线性模型,
h
θ
(
x
1
,
x
2
,
.
.
x
n
)
=
θ
0
,
θ
1
x
1
,
.
.
.
θ
n
x
n
h_{\theta}(x_1,x_2,..x_n) = \theta_0,\theta_1 x_1,...\theta_n x_n
hθ(x1,x2,..xn)=θ0,θ1x1,...θnxn如果这不仅仅是x的一次方,比如增加二次方,那么模型就变成了多项式回归。这里只写一个只有两个特征的p次方的多项式回归模型:
线性回归的推广:广义线性回归

线性回归的正则化
什么是过拟合?
机器学习中,如果参数过多,模型过于复杂,容易造成过拟合。即模型在训练样本数据上表现的很好,但是在实际测试样本上表现的很差,不具备良好的泛化能力。为了防止模型的过拟合化,我们在建立线性模型的时候经常需要加入正则化项。一般有L1和L2两种正则化。L1正则化的项有一个参数 λ \lambda λ来调节损失函数的均方差项和正则化项的权重。
L1和L2正则化有何区别?
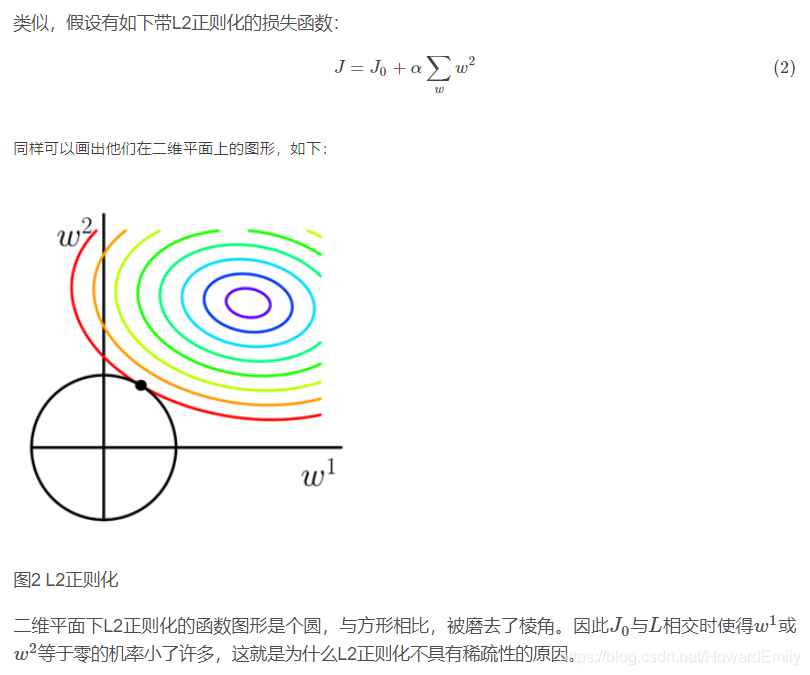
L2正则化
L2正则化比较简单,直接在原来的损失函数上增加权重的平方和
J
(
θ
)
=
E
+
λ
∑
i
θ
i
2
J(\theta) = E + \lambda \sum_i \theta_i^2
J(θ)=E+λ∑iθi2
λ
∑
i
θ
i
2
\lambda \sum_i \theta_i^2
λ∑iθi2这个就是我们的L2正则化.
我们知道正则化的目的是限制参数过多或过大,避免模型更加复杂如10阶多项式,模型可能就过于复杂会发生过拟合。所以为了防止过拟合,我们可以将其高阶部分的权重w限制为0,这样就相当于从高阶的形式转化为低阶的.
但是这类问题属于NP难问题,我们很难直接去确定,所以我们就寻找一个相对宽松的条件,就是我们上面的L2正则化。一个更宽松的条件:
∑
j
θ
j
2
<
=
C
\sum_j \theta_j^2 <= C
∑jθj2<=C
上式对
θ
\theta
θ的平方和做数值上的界定.这时候我们的目标就转化为:最小化训练样本的均方误差E,但是要遵循
θ
\theta
θ的平方和小与C的条件.
请看下图:
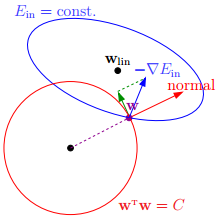
如上图所示,蓝色椭圆区域是最小化 Ein 区域,红色圆圈是 w 的限定条件区域。在没有限定条件的情况下,一般使用梯度下降算法,在蓝色椭圆区域内会一直沿着 w 梯度的反方向前进,直到找到全局最优值 wlin。例如空间中有一点 w(图中紫色点),此时 w 会沿着 -∇Ein 的方向移动,如图中蓝色箭头所示。但是,由于存在限定条件,w 不能离开红色圆形区域,最多只能位于圆上边缘位置,沿着切线方向。w 的方向如图中红色箭头所示。
那么问题来了,存在限定条件,w 最终会在什么位置取得最优解呢?也就是说在满足限定条件的基础上,尽量让 Ein 最小。
我们来看,w 是沿着圆的切线方向运动,如上图绿色箭头所示。运动方向与 w 的方向(红色箭头方向)垂直。运动过程中,根据向量知识,只要 -∇Ein 与运行方向有夹角,不垂直,则表明 -∇Ein 仍会在 w 切线方向上产生分量,那么 w 就会继续运动,寻找下一步最优解。只有当 -∇Ein 与 w 的切线方向垂直时,-∇Ein在 w 的切线方向才没有分量,这时候 w 才会停止更新,到达最接近 wlin 的位置,且同时满足限定条件。


L1正则化
L1 正则化公式也很简单,直接在原来的损失函数基础上加上权重参数的绝对值:
J
(
θ
)
=
E
+
λ
∑
i
∣
w
i
∣
J(\theta) = E + \lambda \sum_i |w_i|
J(θ)=E+λ∑i∣wi∣
我仍然用一张图来说明如何在 L1 正则化下,对 Ein 进行最小化的优化。
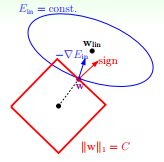
Ein 优化算法不变,
L
1
L1
L1 正则化限定了
w
w
w 的有效区域是一个正方形,且满足
∣
w
∣
<
C
|w| < C
∣w∣<C。空间中的点 w 沿着
−
∇
E
-∇E
−∇E 的方向移动。但是,w 不能离开红色正方形区域,最多只能位于正方形边缘位置。其推导过程与 L2 类似,此处不再赘述。
L1 和 L2正则化的稀疏性
介绍完 L1 和 L2 正则化的物理解释和数学推导之后,我们再来看看它们解的分布性。
L1正则化可以产生稀疏权值矩阵,即产生一个稀疏模型,可以用于特征选择
L2正则化可以防止模型过拟合(overfitting);一定程度上,L1也可以防止过拟合
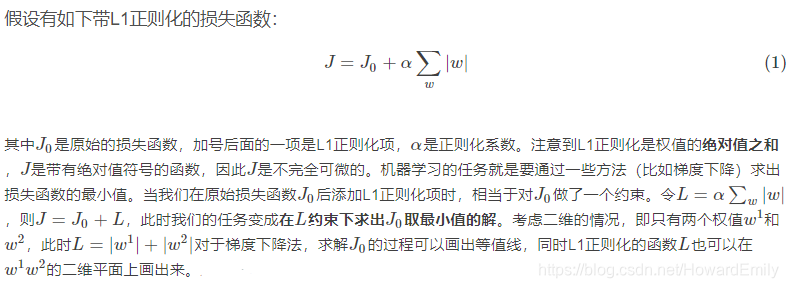
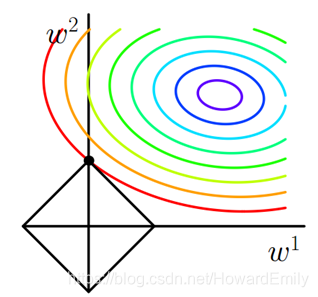
途中等值线是
J
0
J_0
J0的等值线,黑色方形是L1函数的图形。在图中,当
J
0
J_0
J0等值线与L1图形首次相交的地方就是最优解。上图中
J
0
J_0
J0与L在L的一个顶点处相交,这个顶点就是最优解。注意到这个定点的值是
(
0
,
w
2
)
(0,w_2)
(0,w2)可以直观想象,因为L函数有很多突出的定点(二维情况下四个,多为情况下更多),
J
0
J_0
J0与L这些顶点接触的概率肯定会远大于和其他部位接触的概率,而在这些顶点处很多权值等于0,这就是为什么L1正则化可以产生稀疏矩阵,进而用于特征选择.
L2正则化与过拟合
拟合过程中通常都倾向于让权值尽可能小,最后构造一个所有参数都比较小的模型。因为一般认为参数值小的模型比较简单,能适应不同的数据集,也在一定程度上避免了过拟合现象。可以设想一下对于一个线性回归方程,若参数很大,那么只要数据偏移一点点,就会对结果造成很大的影响;但如果参数足够小,数据偏移得多一点也不会对结果造成什么影响,专业一点的说法是『抗扰动能力强』。















 3496
3496











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











