



在使用AT32_Work_Bench配置以太网后,生成的代码无法通过Emac初始化。
生成的代码如下:
error_status wk_emac_init(void)
{
/* add user code begin emac_init 0 */
/* add user code end emac_init 0 */
gpio_init_type gpio_init_struct;
emac_dma_config_type dma_control_para;
/* add user code begin emac_init 1 */
/* add user code end emac_init 1*/
/* configure the MDC pin */
gpio_pin_mux_config(GPIOC, GPIO_PINS_SOURCE1, GPIO_MUX_11);
gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_MODERATE;
gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;
gpio_init_struct.gpio_mode = GPIO_MODE_MUX;
gpio_init_struct.gpio_pins = GPIO_PINS_1;
gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
gpio_init(GPIOC, &gpio_init_struct);
/* configure the RMII_REF_CLK pin */
gpio_pin_mux_config(GPIOA, GPIO_PINS_SOURCE1, GPIO_MUX_11);
gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_MODERATE;
gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;
gpio_init_struct.gpio_mode = GPIO_MODE_MUX;
gpio_init_struct.gpio_pins = GPIO_PINS_1;
gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
gpio_init(GPIOA, &gpio_init_struct);
/* configure the MDIO pin */
gpio_pin_mux_config(GPIOA, GPIO_PINS_SOURCE2, GPIO_MUX_11);
gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_MODERATE;
gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;
gpio_init_struct.gpio_mode = GPIO_MODE_MUX;
gpio_init_struct.gpio_pins = GPIO_PINS_2;
gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
gpio_init(GPIOA, &gpio_init_struct);
/* configure the RMII_CRS_DV pin */
gpio_pin_mux_config(GPIOA, GPIO_PINS_SOURCE7, GPIO_MUX_11);
gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_MODERATE;
gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;
gpio_init_struct.gpio_mode = GPIO_MODE_MUX;
gpio_init_struct.gpio_pins = GPIO_PINS_7;
gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
gpio_init(GPIOA, &gpio_init_struct);
/* configure the RMII_RXD0 pin */
gpio_pin_mux_config(GPIOC, GPIO_PINS_SOURCE4, GPIO_MUX_11);
gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_MODERATE;
gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;
gpio_init_struct.gpio_mode = GPIO_MODE_MUX;
gpio_init_struct.gpio_pins = GPIO_PINS_4;
gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
gpio_init(GPIOC, &gpio_init_struct);
/* configure the RMII_RXD1 pin */
gpio_pin_mux_config(GPIOC, GPIO_PINS_SOURCE5, GPIO_MUX_11);
gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_MODERATE;
gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;
gpio_init_struct.gpio_mode = GPIO_MODE_MUX;
gpio_init_struct.gpio_pins = GPIO_PINS_5;
gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
gpio_init(GPIOC, &gpio_init_struct);
/* configure the RMII_TX_EN pin */
gpio_pin_mux_config(GPIOB, GPIO_PINS_SOURCE11, GPIO_MUX_11);
gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_MODERATE;
gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;
gpio_init_struct.gpio_mode = GPIO_MODE_MUX;
gpio_init_struct.gpio_pins = GPIO_PINS_11;
gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
gpio_init(GPIOB, &gpio_init_struct);
/* configure the RMII_TXD0 pin */
gpio_pin_mux_config(GPIOB, GPIO_PINS_SOURCE12, GPIO_MUX_11);
gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_MODERATE;
gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;
gpio_init_struct.gpio_mode = GPIO_MODE_MUX;
gpio_init_struct.gpio_pins = GPIO_PINS_12;
gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
gpio_init(GPIOB, &gpio_init_struct);
/* configure the RMII_TXD1 pin */
gpio_pin_mux_config(GPIOB, GPIO_PINS_SOURCE13, GPIO_MUX_11);
gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_MODERATE;
gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;
gpio_init_struct.gpio_mode = GPIO_MODE_MUX;
gpio_init_struct.gpio_pins = GPIO_PINS_13;
gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
gpio_init(GPIOB, &gpio_init_struct);
/* config RMII */
scfg_emac_interface_set(SCFG_EMAC_SELECT_RMII);
/* software reset emac dma */
emac_dma_software_reset_set();
while(emac_dma_software_reset_get() == SET);
emac_clock_range_set();
printf("PHY INIT DOWN \n");
emac_control_para_init(&mac_control_para);
mac_control_para.auto_nego = EMAC_AUTO_NEGOTIATION_OFF;
mac_control_para.duplex_mode = EMAC_FULL_DUPLEX;
mac_control_para.fast_ethernet_speed = EMAC_SPEED_100MBPS;
mac_control_para.ipv4_checksum_offload = TRUE;
emac_control_config(&mac_control_para);
/*phy init*/
if(wk_emac_phy_init(mac_control_para.auto_nego,
mac_control_para.duplex_mode,
mac_control_para.fast_ethernet_speed) != SUCCESS)
{
return ERROR;
}
emac_dma_para_init(&dma_control_para);
dma_control_para.rsf_enable = TRUE;
dma_control_para.tsf_enable = TRUE;
dma_control_para.osf_enable = TRUE;
dma_control_para.aab_enable = TRUE;
dma_control_para.usp_enable = TRUE;
dma_control_para.fb_enable = TRUE;
dma_control_para.flush_rx_disable = TRUE;
dma_control_para.rx_dma_pal = EMAC_DMA_PBL_32;
dma_control_para.tx_dma_pal = EMAC_DMA_PBL_32;
dma_control_para.priority_ratio = EMAC_DMA_2_RX_1_TX;
emac_dma_config(&dma_control_para);
macaddr[0] = 0x00;
macaddr[1] = 0x00;
macaddr[2] = 0x44;
macaddr[3] = 0x45;
macaddr[4] = 0x56;
macaddr[5] = 0x01;
emac_local_address_set(macaddr);
/* add user code begin emac_init 2 */
/* add user code end emac_init 2 */
/**
* Users need to configure EMAC interrupt functions according to the actual application.
* 1. Call the below function to enable the corresponding EMAC interrupt.
* --emac_dma_interrupt_enable(...)
* 2. Add the user's interrupt handler code into the below function in the at32f45x_int.c file.
* --void EMAC_IRQHandler(void)
*/
/* add user code begin emac_init 3 */
/* add user code end emac_init 3 */
return SUCCESS;
}
感觉有些蹊跷,于是找到了官方例程,发现差异在于生成的代码无以下两行:
/* reset phy */
reset_phy();
/* reset emac ahb bus */
emac_reset();
于是手动添加后搞定。
-------------------------------------------------------------------------------------------------------------------------------
还有一种情况,即使添加了上述代码,并且确认有效也会卡在while里出不来。
这在官方的资料中有描述,如下:
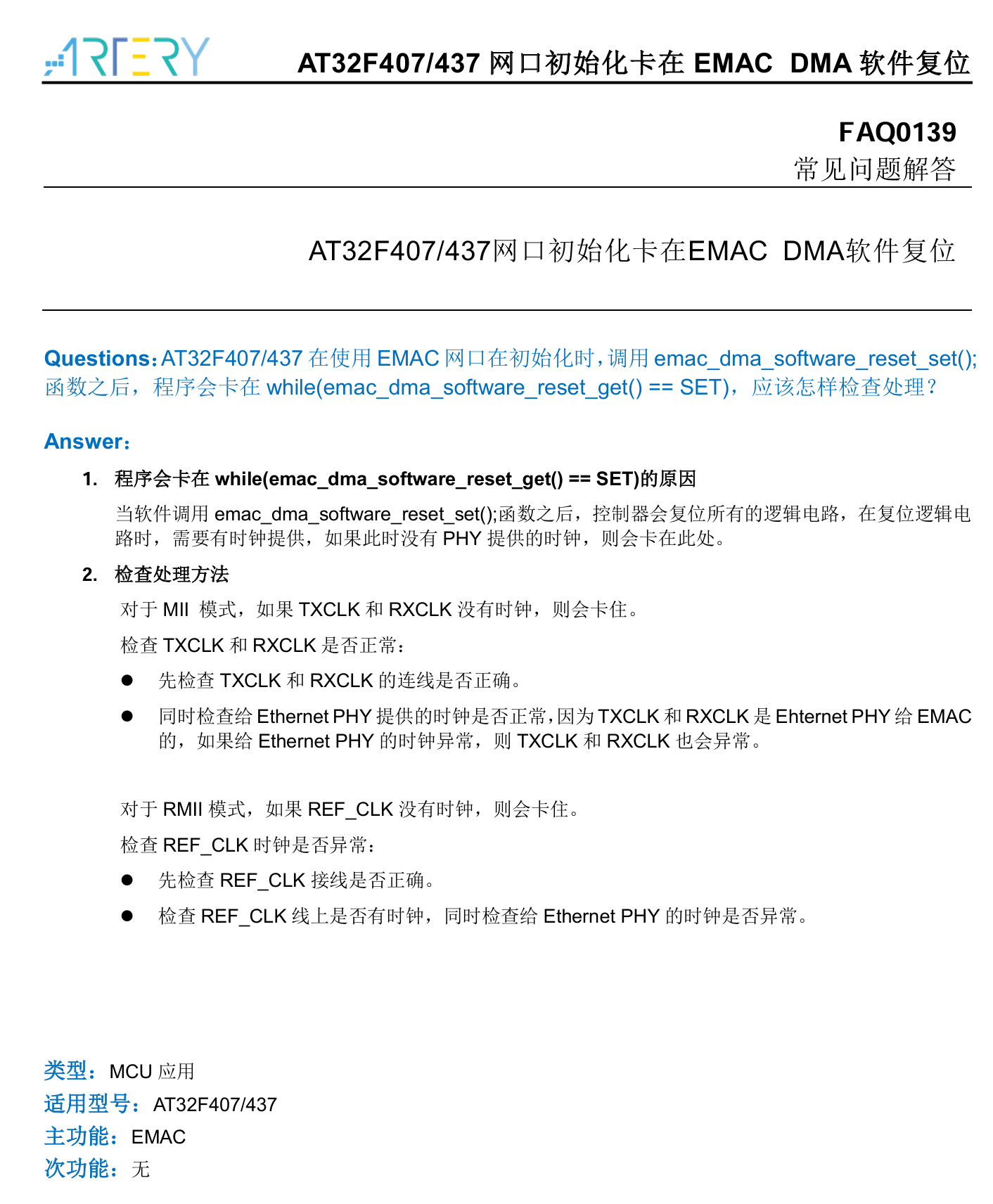 其实就是PHY的晶振问题,导致MCU没收到时钟信号。
其实就是PHY的晶振问题,导致MCU没收到时钟信号。

















 603
603

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









