







1. 最大流问题描述
流网络:

源结点 s,汇点 t,每个结点都在从源结点到汇点的某条路径上
流网络G中的流 是一个实值函数f: V * V -> R
流满足两条性质:
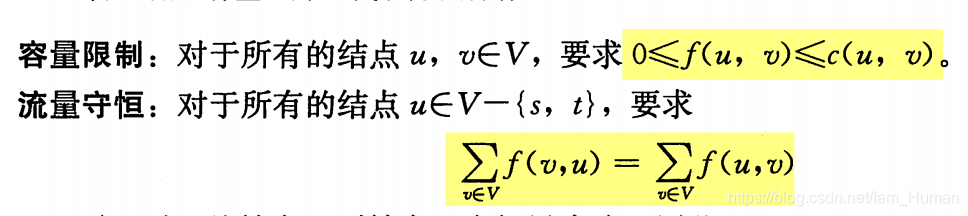
(流量守恒:流入结点的总流量等于流出结点的总流量(除源结点与汇点以外))
流 f 的值 | f |

即从源结点流出的总流量减去流入源结点的总流量
最大流问题 :给定一个流网络G、一个源结点、一个汇点,求值最大的流
2.Ford-Fulkerson方法
残存网络 G_f由特定流网络G与流f产生
残存容量c_f(u,v):
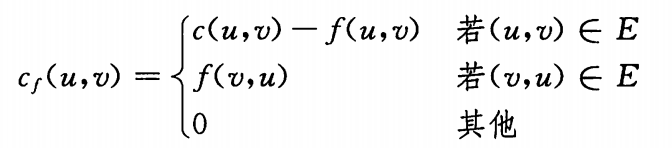

理解: 图G中,若存在残存流量的边加入图G_f, 同时对不存在残存流量的边,将反向流量加入图G_f中
注: 残存网络并不是流网络,因不满足流网络的定义(可能同时存在双向的边)
举例:
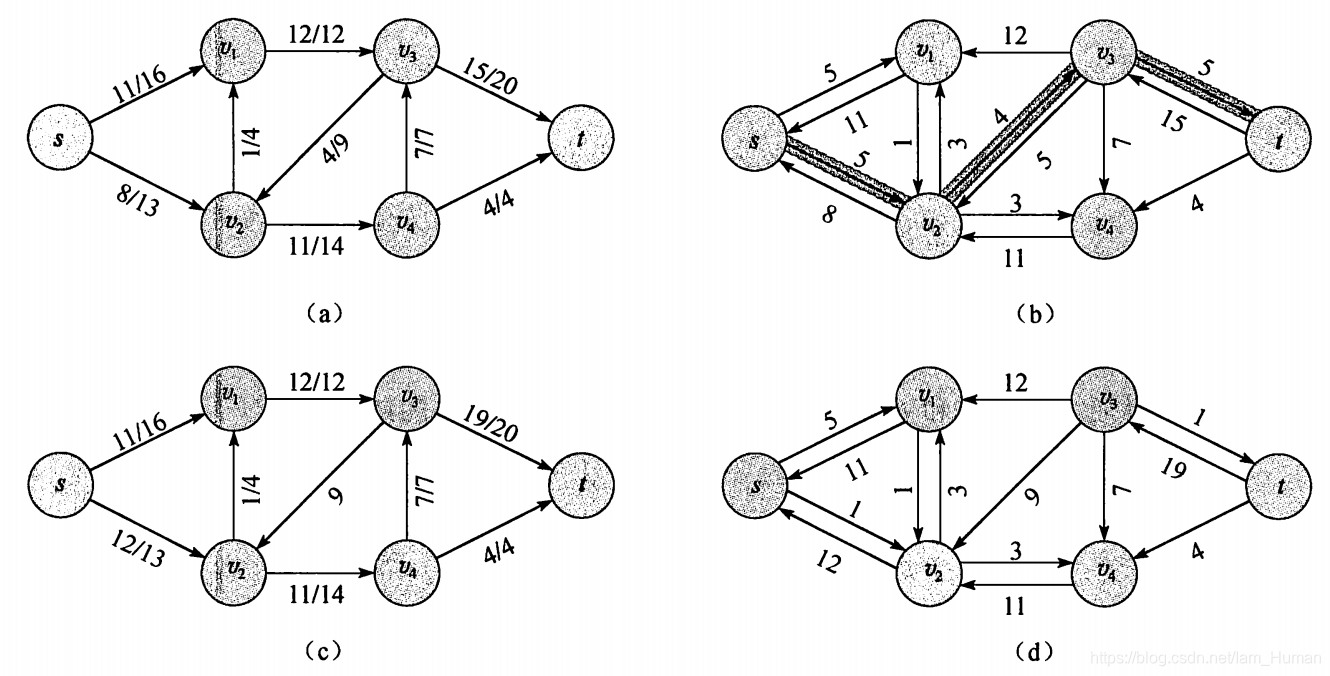
(左边是流网络,右边是残存网络)
如果f是G中的一个流,f’是对应残存网络G_f中的一个流, 定义f | f’为流f’对流f的递增, 它是一个V*V->R的函数:

引理:

增广路径
对流网络G=(V, E)和流f, 增广路径p是残存网络G_f中一条从源结点s到汇点t的简单路径。
称在一条增广路径p上能够为每条边增加的流量的最大值为路径p的残存容量,定义:

关于(由增广路径诱导的流网络G中的流f)f_p定义如下:

将流f增加f_p的量, 将获得G中另一个流, 该流的值更加接近最大流

3.最小割
流网络的切割
流网络G=(V, E)中的一个切割(S, T)将结点集合V划分为S和T=V-S两个集合,使得s属于S,t属于T
若f是一个流,则定义横跨切割(S, T)的净流量 f(S, T)如下:

切割(S, T)的容量是

一个网络的最小切割是整个网络中容量最小的切割
举例:
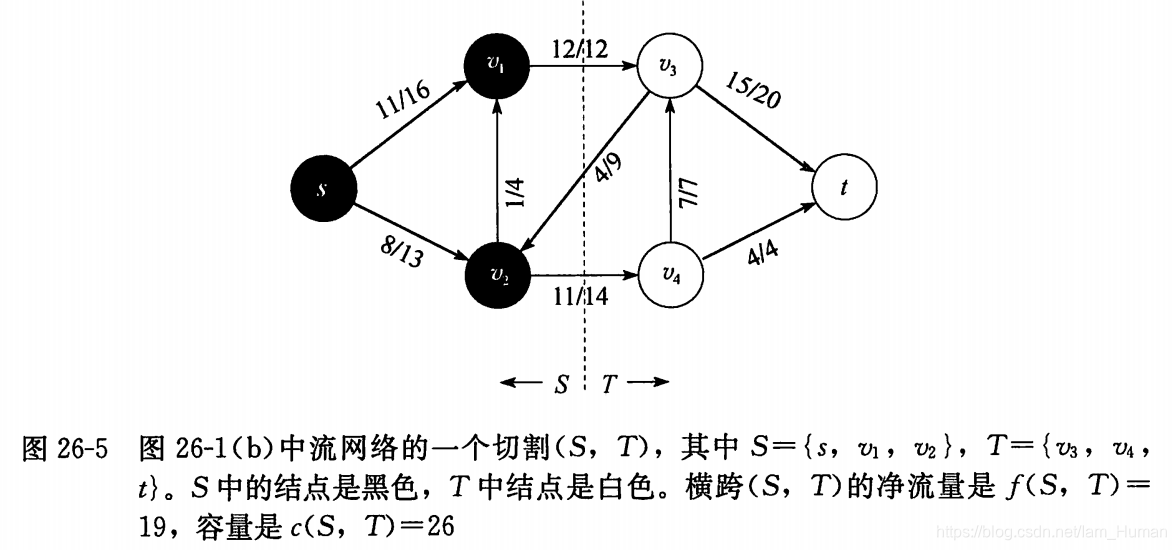
- 对网络的一个流f, 网络的任意切割(S, T)都有切割的净流量等于流f的值,即f(S, T) = | f |
- 流网络G中的任意流f的值都不能超过G中任意切割的容量,即 max | f | <= min c(S, T)
4.最大流最小割定理

求最大流/最小割: Ford-Fulkerson方法
基本的Ford-Fulkerson算法:

举例:
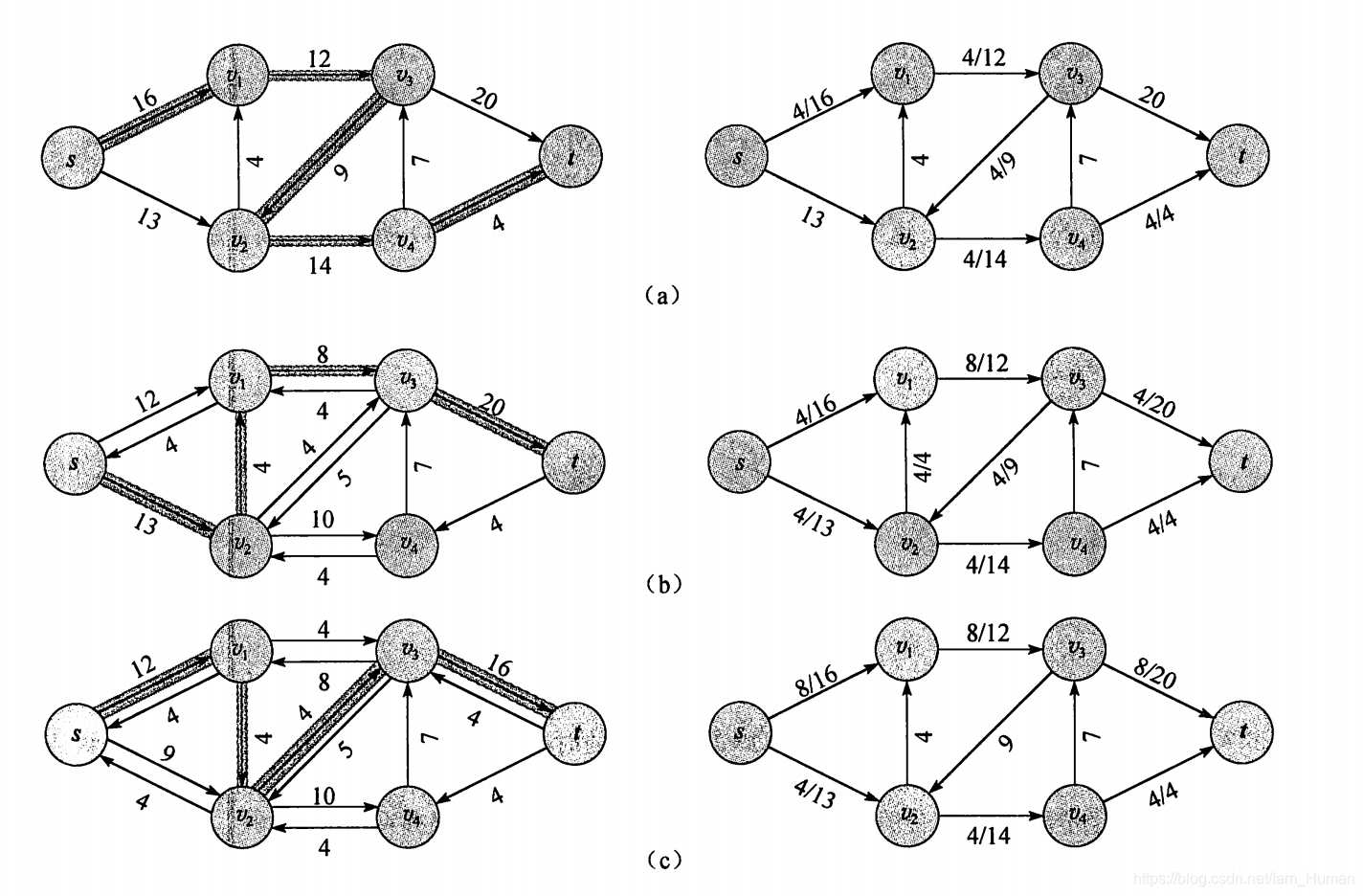
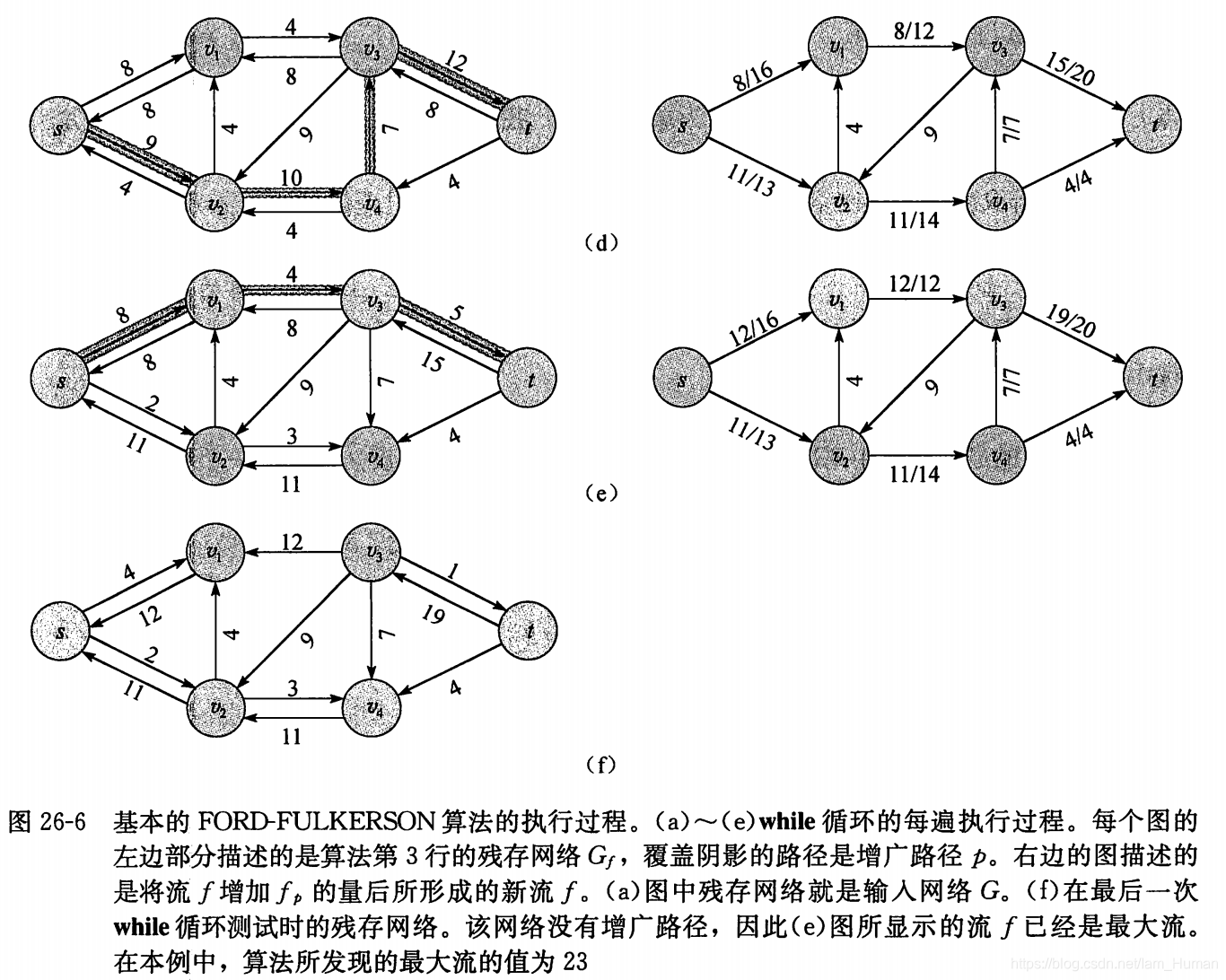
算法时间复杂度分析:
运行时间取决于第三行如何寻找增广路径,如果选择不好,流的值回随着递增而增加,但不一定收敛于最大值。
-
容量值为整数(或有理数)且最大流值较小
如果容量是有理数,可通过乘以系数转换为整数,设f* 为转换后网络的最大流
通过深度优先搜索或广度优先搜索,在残存网络中找到一条路径的时间为O(V+E’) = O(E), while的每次循环所需时间为O(E), 流量值每次迭代最少增加一个单位,因此总的算法运行时间为 O(E |f|)* -
|f*|取值很大的特殊情况–Edmonds-Karp算法
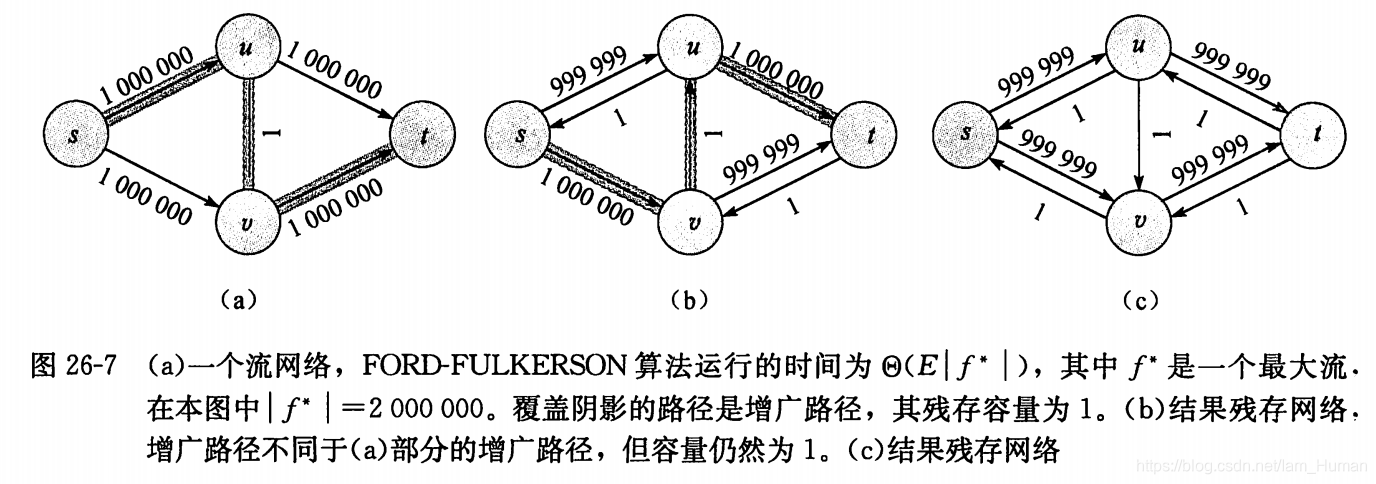
在残存网络中选择增广路径是一条从源结点到汇点的最短路径
#include<cstdio>
#include<cstring>
#include<vector>
#include<iostream>
#include<algorithm>
# define maxflowLimit 10000
# define NumofVLimit 505
//最大流最大不能超过maxflowLimit
//结点数最多不超过NumofVLimit
//源结点编号必须为1, 汇点编号必须为n+1
//举例:
//6 9
//1 2 16
//1 3 13
//3 2 4
//2 4 12
//3 5 14
//4 3 9
//5 4 7
//4 6 20
//5 6 4
//
//the max flow is 23
//the number of S about min ge is 4
//1 2 3 5
using namespace std;
struct node{
int to,w,vap;
}Q;
int n,m,shu; //n:结点个数 m:边的个数
bool fafe[NumofVLimit]; //fafe: 记录结点是否被访问
vector<node> V[NumofVLimit]; //邻接表 存储图, 向量便于深度优先搜索
void add_edge(int a,int b,int c)
{
Q.to=b;Q.w=c;Q.vap=V[b].size();
V[a].push_back(Q); // a->b 容量为c size:与之连通的结点数,容量0不算
Q.to=a;Q.w=0;Q.vap=V[a].size()-1; // b->a 容量为0
V[b].push_back(Q);
}
int ex_dfs(int x,int mi) //使用深度优先搜索 找到从结点a开始的增广路径,返回该增广路径的容量
{
fafe[x]=true;
if (x==n) return mi;
for (int i=0;i<V[x].size();i++)
{
if (fafe[V[x][i].to]||V[x][i].w==0) continue; //递归出口1: 该点被访问过 或 至该店路径值为0
int k=ex_dfs(V[x][i].to,min(mi,V[x][i].w));
if (k) //递归出口2 k=0
{
V[x][i].w-=k; // <2, 4> - 1
V[V[x][i].to][V[x][i].vap].w+=k; //<4, 2> + 1 这里的vap=0是2在V[4]里的位置,不是指代2
return k;
}
}
return 0;
}
void dfs_(int x,int lei) //在最后的残存网络上,通过深度优先搜索, 寻找最小割,将原点能到达的结点与源结点划为一个集合
{
fafe[x]=true;shu++;
if (lei==1)
printf("%d%c",x,m==shu?'\n':' ');
for (int i=0;i<V[x].size();i++)
{
if (fafe[V[x][i].to]||V[x][i].w==0) continue;
dfs_(V[x][i].to,lei);
}
}
int main()
{
printf("Please input the number of V and the number of E\n");
scanf("%d%d",&n,&m); //n:节点个数 m:边的个数
int a,b,c;
while (m--)
{
scanf("%d%d%d",&a,&b,&c); //依次输入各边<a, b> 边的权值为c, 源结点必须为1
add_edge(a,b,c);
}
int ans=0;a=1;
while (a)
{
a=0;
memset(fafe,false,sizeof(fafe));
a=ex_dfs(1,maxflowLimit); //迭代从源结点开始探索增广路径, a是增广路径的容量, 直到a为0,即不再存在增广路径
ans+=a; //ans依次累加增广路径的残存容量, 最终即为最大流值
}
memset(fafe,false,sizeof(fafe));
shu=0;dfs_(1,0);m=shu; //计算m = shu,即最小割中S集合的结点数
memset(fafe,false,sizeof(fafe));
printf("the max flow is %d\n",ans);
printf("the number of S about min ge is %d\n", m);
shu=0;dfs_(1,1); //输出最小割中S集合的各个结点
return 0;
}


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









