






步进伺服电机控制程序:
1.步进电机的正转、反转控制
2.相对和绝对位置运动
3.电机复位找回零点功能
4.设置速度(周期)
步进电机控制,伺服电机控制
硬件:1西门子S7-200PLC
2.威伦触摸屏
3.步进电机驱动器(不限制厂家)
ID:836625689902439
gao699592
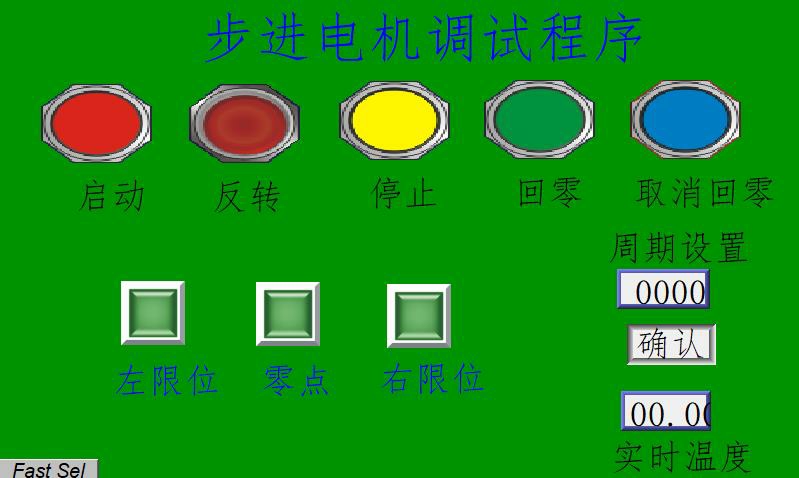
步进伺服电机控制程序
步进电机是一种常见的电机类型,它以固定的步进角度进行运动。通过控制步进电机的脉冲信号,可以实现其正转、反转控制。在实际应用中,一般还需要实现相对和绝对位置运动、电机复位找回零点以及设置速度等功能。本文将围绕这几个主题展开,介绍步进伺服电机控制程序的设计与实现。
在步进电机的正转、反转控制中,我们需要控制电机的脉冲信号来实现电机的前进和后退。通过控制脉冲信号的频率和方向,可以实现电机的正转和反转。在设计控制程序时,我们可以利用西门子S7-200PLC来控制步进电机的脉冲信号输出。同时,为了方便操作和监控,我们可以添加威伦触摸屏作为人机界面,通过触摸屏设置电机的运动方向和步数。
除了正转、反转控制外,我们还需要实现相对和绝对位置运动功能。相对位置运动是指根据当前位置的基础上进行位移,而绝对位置运动则是指根据事先设定的位置进行精确定位。为了实现这两种功能,我们可以在控制程序中添加相应的参数设置。通过输入相对位移值或绝对位置值,控制程序可以计算出对应的步数,并控制步进电机按照设定的位置进行运动。
另外,为了实现电机的复位找回零点功能,我们需要在控制程序中添加相应的逻辑。复位找回零点是指将电机移动到初始位置,通常是机械结构的起始点或者某个参考位置。在控制程序中,我们可以通过设置一个特定的标志位来判断是否需要进行复位操作。当标志位为真时,控制程序会将电机驱动器的位置参数重置为初始值,从而实现复位找回零点的功能。
另外,为了满足不同应用场景的需求,我们还可以在控制程序中设置电机的速度。速度设定可以通过周期来进行控制,通过调整周期的大小,可以改变电机运动的速度。在控制程序中,我们可以根据输入的速度参数,将其转换为对应的周期值,并将周期值传输到步进电机驱动器中,从而实现电机速度的控制。
在硬件方面,本文以西门子S7-200PLC为例进行介绍,同时威伦触摸屏也作为人机界面的一部分。当然,在实际应用中,并不限制硬件的厂家选择,可以根据实际需求选择合适的硬件设备。
综上所述,本文围绕步进伺服电机控制程序展开,从步进电机的正转、反转控制、相对和绝对位置运动、电机复位找回零点功能以及设置速度等方面进行了详细介绍。通过合理的控制程序设计和合适的硬件选择,可以实现步进伺服电机的精确控制,满足不同应用场景的需求。希望本文能为相关技术人员在步进伺服电机控制方面提供一定的参考和帮助。
(字数:789)
相关的代码,程序地址如下:http://imgcs.cn/625689902439.html
















 2452
2452

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









