






西门子S7-200smart PLC运动控制 二轴,高速脉冲控制步进电机或者伺服电机,触摸屏控制,可以设置绝对位置,触摸屏通讯,实时显示当前位置 实例,程序,案例 触摸屏型号MT6070IH ,
ID:985628891032360
猫猫爱电子
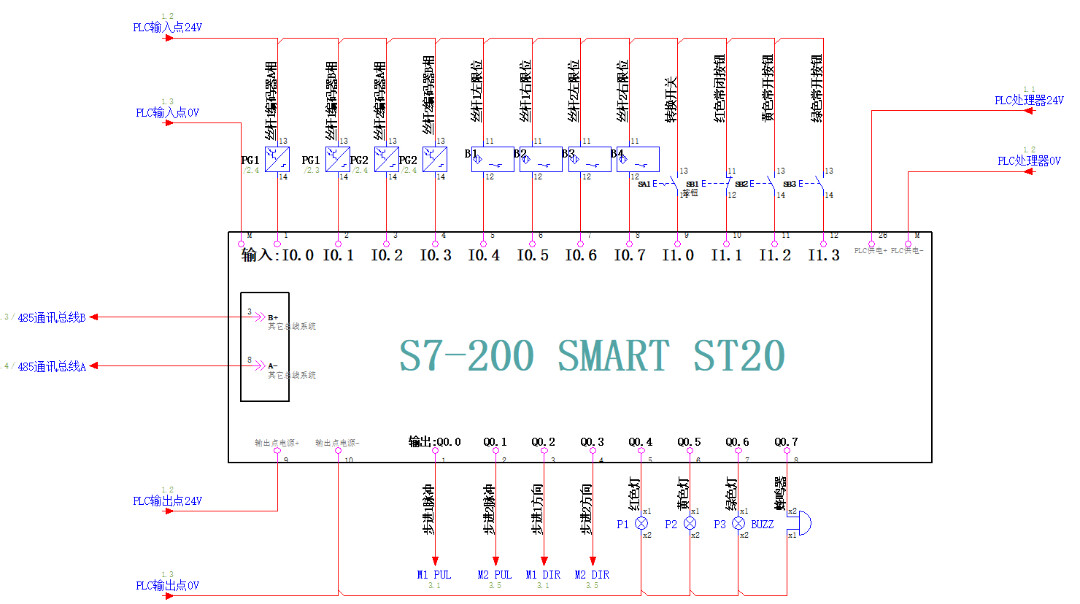


西门子S7-200smart PLC是一款功能强大的运动控制设备,可实现对二轴的高速脉冲控制步进电机或伺服电机。本文将介绍S7-200smart PLC的运动控制功能,并重点关注其与触摸屏的配合使用,以及触摸屏的通讯和实时显示当前位置的功能。同时,本文将提供一些实例和案例,以帮助读者更好地理解和应用。
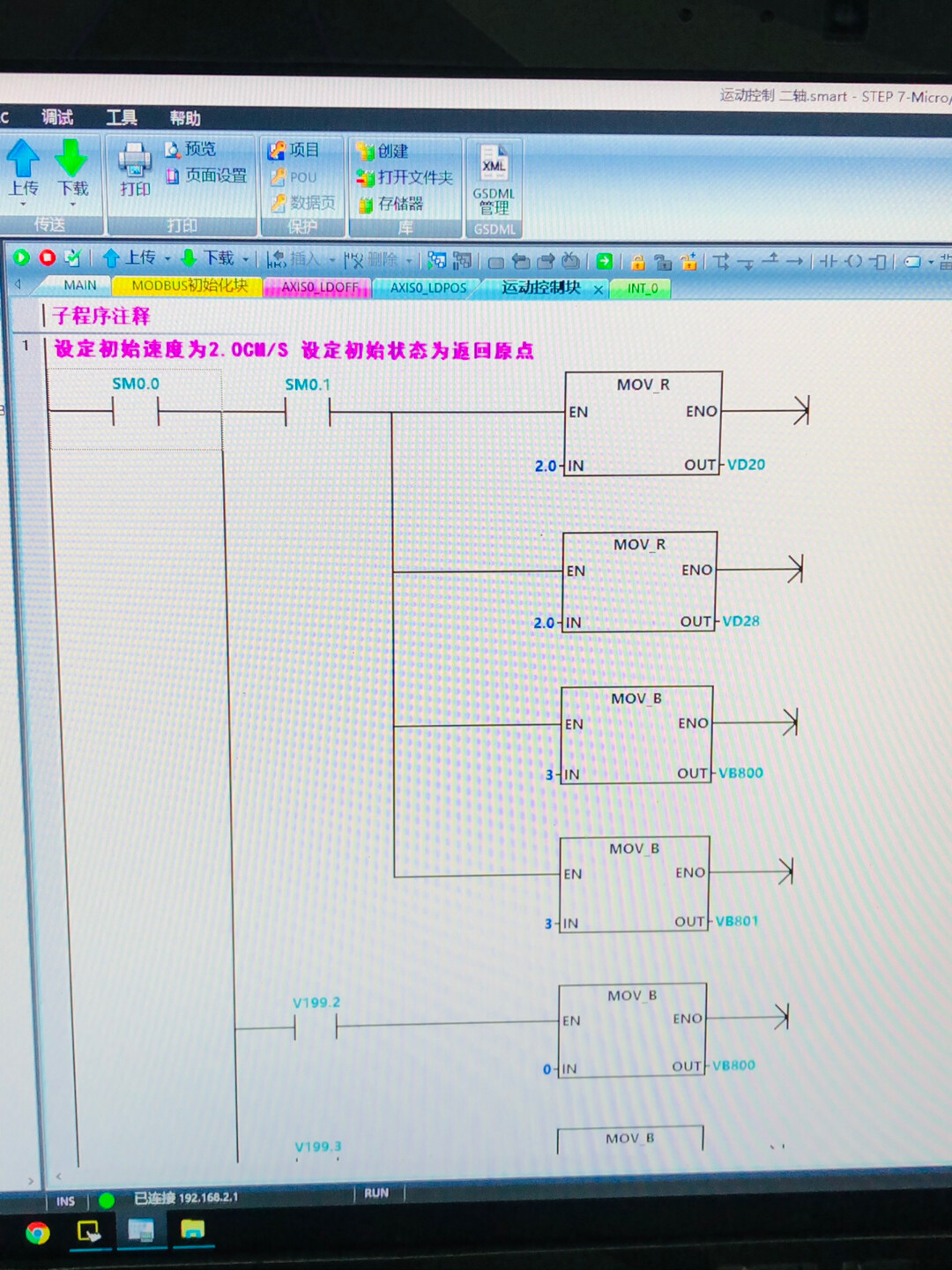
首先,让我们来了解一下S7-200smart PLC的运动控制功能。S7-200smart PLC采用了先进的运动控制算法和高速脉冲输出模块,可实现对步进电机和伺服电机的精确控制。通过与外部编码器配合使用,PLC能够精确测量和控制电机的位置、速度和加速度,实现精准运动控制。另外,S7-200smart PLC还支持多种编程语言,如Ladder Diagram(LD)、Function Block Diagram(FBD)等,方便工程师根据实际需求进行编程。
接下来,我们将关注S7-200smart PLC与触摸屏的配合使用。在运动控制系统中,触摸屏作为人机界面,起到了关键的作用。S7-200smart PLC与触摸屏的配合使用,能够实现更加直观、方便的操作和监控。触摸屏型号MT6070IH是一款专为S7-200smart PLC设计的触摸屏,具有高分辨率、多点触控、抗干扰等特点。通过与S7-200smart PLC进行通讯,触摸屏可以实时获取PLC的运行状态、传感器数据等信息,并将其直观显示在屏幕上。同时,触摸屏还支持触摸输入,可以通过界面上的按钮、滑动条等控件,方便地控制和调整电机的运动参数和状态。
在触摸屏控制方面,S7-200smart PLC可以设置绝对位置。绝对位置是指电机在运动过程中所处的准确位置,可用于实现精确定位或轴间同步控制。通过在PLC程序中定义和更新绝对位置参数,并与触摸屏进行通讯,工程师可以方便地对电机进行定位或调整。此外,触摸屏还可以实时显示当前位置,用户可以直观地了解电机的运动状态,并及时进行调整和干预。
下面,我们将通过一些实例和案例,进一步说明S7-200smart PLC运动控制的应用场景和实际效果。例如,假设我们需要控制一台装置进行精确定位操作,可以通过S7-200smart PLC与触摸屏的组合,实现对电机位置的准确定位和调整。又如,在一个自动化生产线中,我们需要对多个电机进行协调控制,可以通过S7-200smart PLC与触摸屏的联动,实现各电机之间的同步运动。这些实例和案例不仅展示了S7-200smart PLC运动控制的灵活性和可靠性,也向读者展示了其在工业自动化领域的广泛应用前景。
综上所述,西门子S7-200smart PLC运动控制具备强大的功能和灵活的扩展性。通过与配套的触摸屏进行组合使用,可以实现更加直观、方便的操作和监控。触摸屏的通讯和实时显示当前位置的功能,进一步增强了运动控制系统的实用性和可靠性。通过实例和案例的介绍,读者可以更好地了解和应用S7-200smart PLC运动控制技术,为工程实践提供有力支持。
总之,S7-200smart PLC与触摸屏的配合使用,在运动控制领域具有广泛的应用前景。通过本文所提供的介绍和案例,读者能够深入了解S7-200smart PLC运动控制的技术特点和实际应用,从而为自己的工程实践提供有效的指导和参考。
相关的代码,程序地址如下:http://nodep.cn/628891032360.html


















 4199
4199

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









