







在数据处理与应用的过程中,我们难免会遇到一些低质量的遥感数据,低质量遥感数据一般是由于天气因素导致的,在云量较多时,卫星传感器所采集到的地面信息被云层所遮挡,导致遥感图像成像过程中产生了较多噪声,对遥感数据的精确度造成了一定影响,如果不解决这些数据中的噪声,会导致我们从遥感数据中所提取到的信息也不够精确。
为更好的处理遥感数据中的噪声,我们一般会使用均值滤波或中值滤波对遥感图像进行去噪,去除遥感图像噪声的目的在于最大程度上还原原始数据,以便于我们更好的提取遥感图像中的有效信息。
那么,在进行滤波代码的实现以前,让我们一起来看一下滤波的实现原理吧!
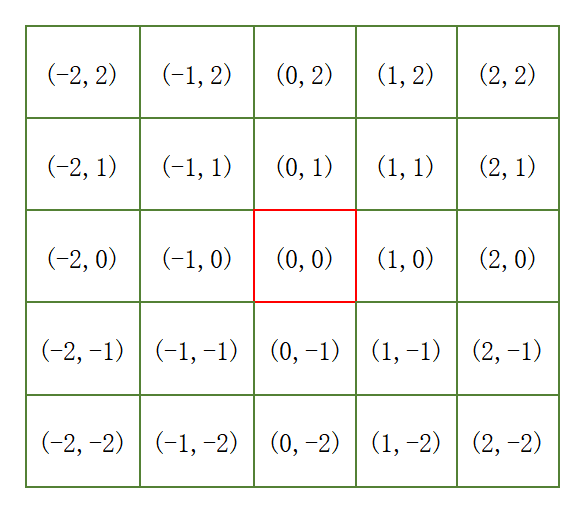
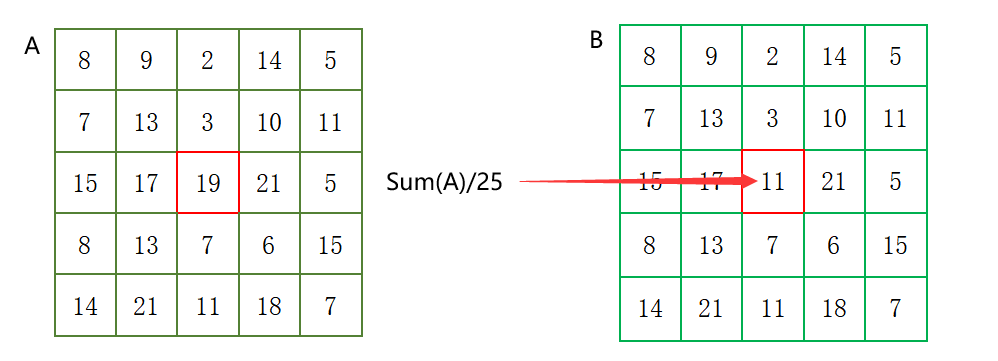
其中,滤波算法的主要思路为,设置一个n*n(n=2x+1,x>0)大小的窗口,随后对这个窗口的中心点像元进行重新赋值,以5*5的窗口以及均值滤波算法为例,在上图中,窗口A的中心像元(0,0)的值为19,而经过了均值滤波后,也就是在窗口B中,原窗口A的中心像元(0,0)的值变成了11,而这个值,是由原窗口A中所有像元的值加起来的总和除以25得到的。
通过上述算法,即可对一个窗口内的遥感数据进行滤波,基于上述思路,对整个遥感图像进行遍历,以窗口的中心像元为基准,取到N个相同大小的窗口(窗口大小会随应用场景的变化而变化),对其中的每一个窗口中心像元进行滤波,以下,为滤波过程的核心代码,其中,self.w_1是人为设置的窗口大小,height和width分别表示遥感数据的行数和列数,result表示滤波后的新数据。
edge = int((self.w_l - 1) / 2)#计算遍历的起始位置与终点
height = data.shape[0]#获取数据的行数
width = data.shape[1]#获取数据的列数
for i in range(edge,height-edge):#设定遍历起始行与终点行
for j in range(edge,width-edge):#设定遍历起始列与终点列
newdata =data[i - edge:i + edge + 1, j - edge:j + edge + 1]#取一个n*n的窗口
if self.no_data_value in newdata:
continue
else:
result[i, j] = np.median(newdata)#调用np.median求中值函数基于以上代码,即可完成中值滤波(不对NoDATA及数组边缘进行计算)。
除了滤波部分的代码以外,我们还需了解,ArcPy是如何对遥感数据进行读取以及对计算结果进行输出的,首先,我们需要利用ArcPy的Raster方法对数据进行读取,随后利用ArcPy的RasterToNumPyArray方法,将数据转换为array数组,并利用以上滤波算法对数组进行滤波。在滤波完成后,我们还需要将滤波后的结果保存为TIFF文件。
以下部分为数据读取与成果输出部分的代码。
arcpy.env.outputCoordinateSystem = self.Path#设置输出坐标系
arcpy.env.overwriteOutput = True#可以覆盖数据
tif = arcpy.Raster(self.Path)#读取数据
ExtentXmin = tif.extent.XMin#取x坐标最小值
ExtentYmin = tif.extent.YMin#取y坐标最小值
lowerLeft = arcpy.Point(ExtentXmin,ExtentYmin)#取得数据起始点坐标(左下角坐标)
Widthcellsize=tif.meanCellWidth#像元宽度
Heightcellsize=tif.meanCellHeight#像元高度
self.no_data_value = tif.noDataValue#获取数据NoDATA
#将Raster转换为Array数组
self.data = arcpy.RasterToNumPyArray(tif, nodata_to_value=self.no_data_value)
newdata = self.Filter()
if newdata != None:
#将滤波后的array数组转换为Raster,其中需要指定其左下角坐标,像元大小及NoDATA等参数
newRaster = arcpy.NumPyArrayToRaster(newdata,lowerLeft,Widthcellsize,Heightcellsize,value_to_nodata=self.no_data_value)
newRaster.save(self.Save)#将Raster保存到存储目录下
arcpy.BuildPyramids_management(self.Save)#建立金字塔至此,本次讲解到此结束,以下为此算法的全部代码。
import arcpy
import numpy as np
class RasterFilter:
def __init__(self,DataPath,windows_length,method,SavePath):
self.Path = DataPath
self.w_l = windows_length
self.method = method
self.Save = SavePath
def Start(self,method="Median"):
arcpy.env.outputCoordinateSystem = self.Path#设置输出坐标系
arcpy.env.overwriteOutput = True#可以覆盖数据
tif = arcpy.Raster(self.Path)#读取数据
ExtentXmin = tif.extent.XMin#取x坐标最小值
ExtentYmin = tif.extent.YMin#取y坐标最小值
lowerLeft = arcpy.Point(ExtentXmin,ExtentYmin)#取得数据起始点坐标(左下角坐标)
Widthcellsize=tif.meanCellWidth#像元宽度
Heightcellsize=tif.meanCellHeight#像元高度
self.no_data_value = tif.noDataValue#获取数据NoDATA
#将Raster转换为Array
self.data = arcpy.RasterToNumPyArray(tif, nodata_to_value=self.no_data_value)
newdata = self.Filter()
if newdata != None:
#将滤波后的array数组转换为Raster,其中需要指定其左下角坐标,像元大小及NoDATA等参数
newRaster = arcpy.NumPyArrayToRaster(newdata,lowerLeft,Widthcellsize,Heightcellsize,value_to_nodata=self.no_data_value)
newRaster.save(self.Save)#将Raster保存到存储目录下
arcpy.BuildPyramids_management(self.Save)#建立金字塔
def Filter(self):
data = self.data#获取array数据
result = data.copy()#复制array到result
edge = int((self.w_l - 1) / 2)#计算遍历起始位置与终点
height = data.shape[0]#获取数据的行数
width = data.shape[1]#获取数据的列数
if height - 1 - edge <= edge or width - 1 - edge <= edge:#如何数据行列数小于设置的窗口大小,则返回并抛出异常
print("The parameter k is to large.")
return None
if self.method == "Median":
for i in range(edge,height-edge):#设定遍历起始行与终点行
for j in range(edge,width-edge):#设定遍历起始列与终点列
newdata =data[i - edge:i + edge + 1, j - edge:j + edge + 1]#取一个n*n的窗口
if self.no_data_value in newdata:
continue
else:
result[i, j] = np.median(newdata)#调用np.median求中值函数
elif self.method == "Average":
for i in range(edge,height-edge):
for j in range(edge,width-edge):
newdata =data[i - edge:i + edge + 1, j - edge:j + edge + 1]
if self.no_data_value in newdata:
continue
else:
result[i, j] = np.average(newdata)#调用np.average求均值函数
return result
if __name__=='__main__':
rFilter = RasterFilter(r"F:\NPPOFNDVI\ASTERGDEMV2DEM_fujian\ASTGTM2_N23E116_dem.tif",5,"Median",r"F:\NPPOFNDVI\ASTERGDEMV2DEM_fujian\DEM2.tif")
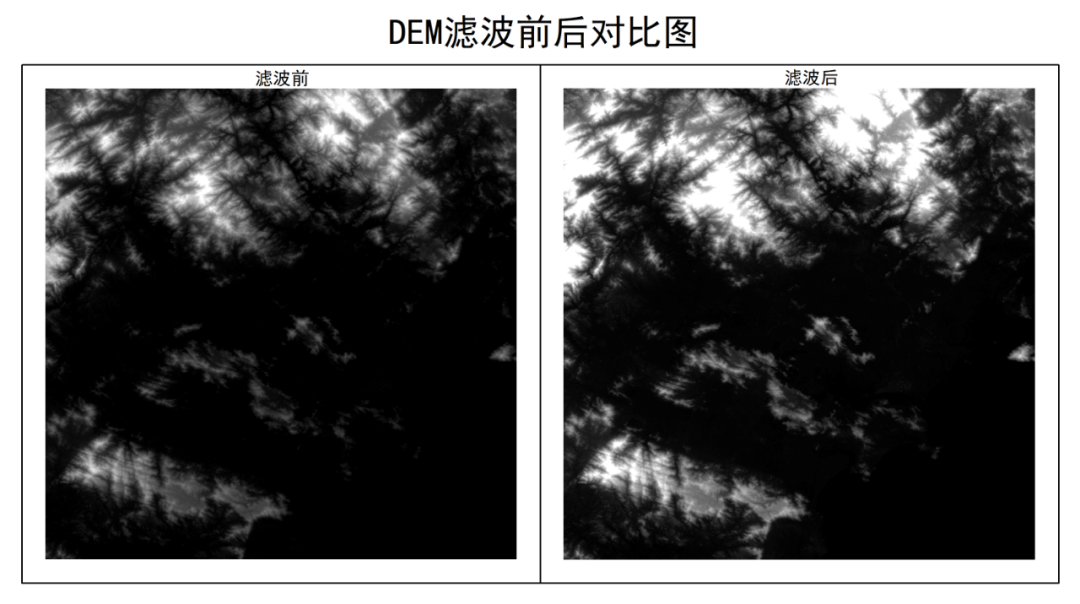
rFilter.Start()以下为DEM数据滤波前后的对比图。
















 4262
4262











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











