






欧姆龙PLC项目程序NJ系列模切机程序
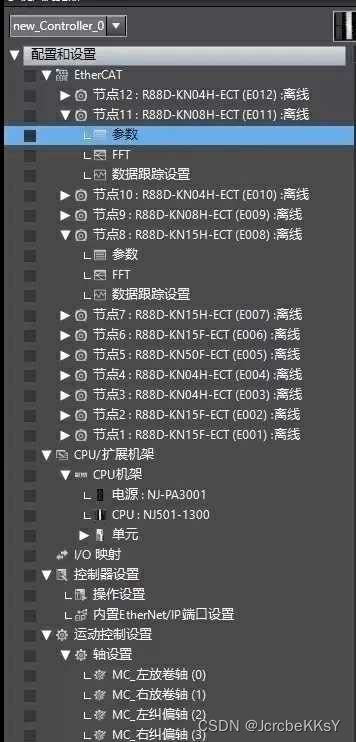
1、12轴EtherCAT总线伺服运动控制,包含回零、点动、定位、速度控制。
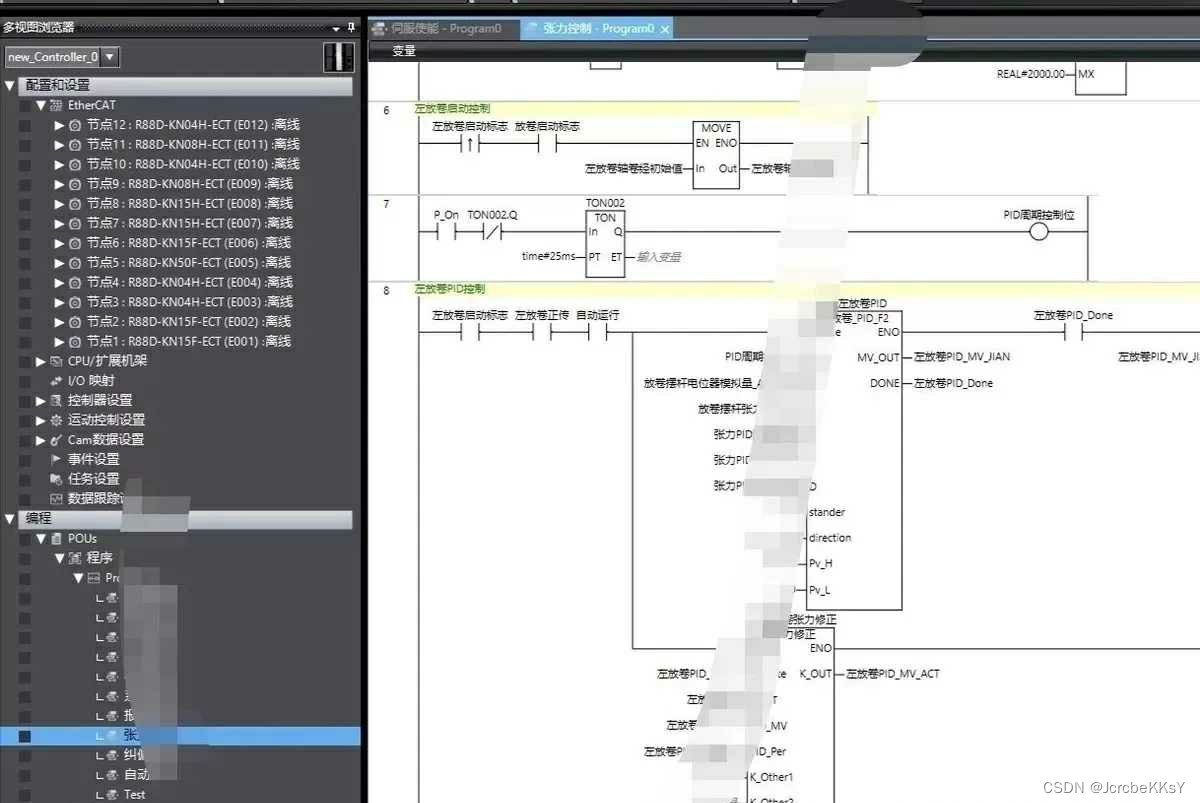
2、张力控制PID算法,收放卷径计算,
3、隔膜自动纠偏控制,模拟量数据平均化处理,
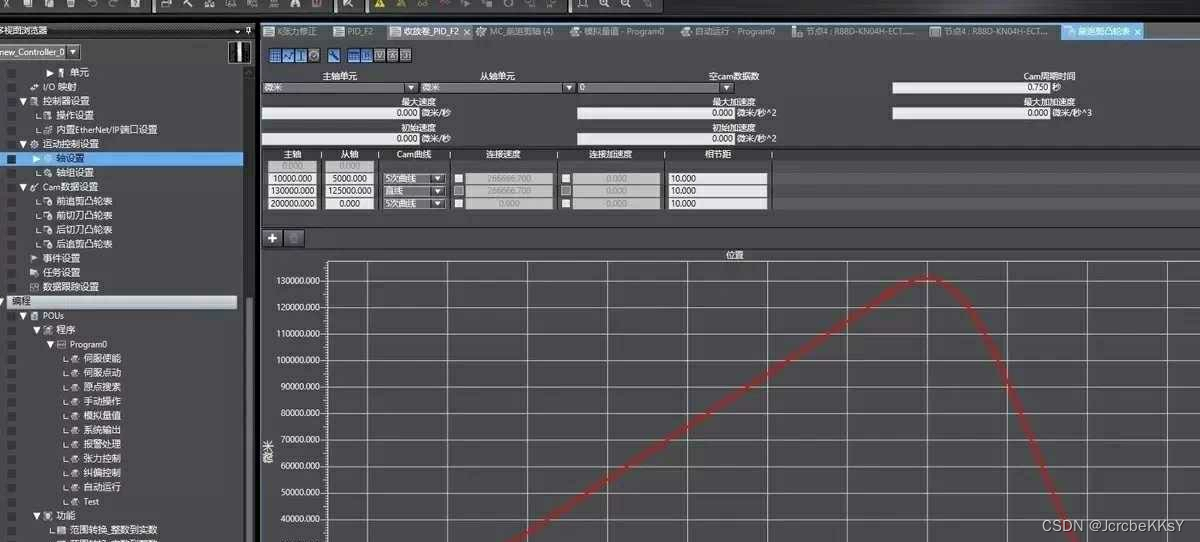
4、同步运动控制,凸轮表追剪和裁切
5、结构化编程,ST语言功能块
6、项目结构规范,思路清晰,注释详细
7、通过该项目可以学习到PLC高端复杂的实际应用技术。

欧姆龙PLC项目程序NJ系列模切机程序
摘要:本文主要介绍了欧姆龙PLC项目程序NJ系列模切机程序的设计与实现。该程序通过12轴EtherCAT总线伺服运动控制,实现了模切机的回零、点动、定位、速度控制等功能。同时,程序还包括了张力控制PID算法、收放卷径计算、隔膜自动纠偏控制、模拟量数据平均化处理、同步运动控制以及凸轮表追剪和裁切等功能。该项目结构规范,思路清晰,注释详细,对于学习PLC高端复杂的实际应用技术具有重要意义。
关键词:欧姆龙PLC、NJ系列、模切机、EtherCAT总线、伺服运动控制、张力控制PID算法、隔膜自动纠偏控制、模拟量数据平均化处理、同步运动控制、凸轮表追剪和裁切
-
引言 模切机在印刷、包装等行业中起到了重要的作用,为了满足不断增长的市场需求,提高生产效率和质量,我们设计了一款基于欧姆龙PLC的NJ系列模切机程序。本文将详细介绍该程序的设计与实现。
-
欧姆龙PLC和NJ系列 欧姆龙PLC是一种常用的工控设备,具有可靠性高、实时性强的特点。NJ系列是欧姆龙PLC的高端产品,具有更强大的处理能力和丰富的扩展性。本项目选择NJ系列作为控制核心,保证了程序的稳定性和高效性。
-
EtherCAT总线伺服运动控制 为了实现模切机的精确运动控制,我们采用了12轴EtherCAT总线伺服运动控制技术。该技术通过集成驱动器和EtherCAT通信模块,实现了多轴之间的高速同步运动控制,并具有良好的实时性和稳定性。
-
张力控制PID算法与收放卷径计算 模切机在工作过程中需要对张力进行精确控制,以保证产品的质量。为此,我们采用了张力控制PID算法,并结合收放卷径计算,通过对控制参数的调节,实现了精确的张力控制。
-
隔膜自动纠偏控制与模拟量数据平均化处理 为了保证模切机的工作精度,我们设计了隔膜自动纠偏控制功能。通过对隔膜位置的在线检测和控制,实现了对隔膜的自动纠偏。同时,为了减少模拟量数据的噪声和波动,我们采用了平均化处理算法,提高了系统的稳定性和准确性。
-
同步运动控制与凸轮表追剪和裁切 模切机的同步运动控制是其重要的功能之一,它能够保证模切过程中的准确性和高效性。通过对凸轮表的追剪和裁切控制,我们实现了模切机的高速连续运动,提高了生产效率和产品质量。
-
结构化编程与ST语言功能块 为了保证程序的可读性和可维护性,我们采用了结构化编程方法,并充分利用NJ系列PLC的ST语言功能块。通过模块化的设计和注释详细的代码,使得程序的结构清晰,易于理解和修改。
-
项目结构规范与思路清晰 在设计该程序时,我们注重项目结构规范和思路的清晰性。通过合理的模块划分和模块间的接口设计,使得程序的开发和维护变得更加简单和高效。
-
总结 通过对欧姆龙PLC项目程序NJ系列模切机程序的设计与实现的介绍,我们可以看到该程序在实际应用中具有重要的意义。它不仅满足了模切机的各项功能需求,还具备了较高的性能和稳定性。同时,项目结构规范和思路清晰的特点,使得该程序具备了较强的可扩展性和可维护性。通过学习该项目,我们可以深入了解PLC高端复杂的实际应用技术,并将其应用到其他领域中。
参考文献: [1] 欧姆龙PLC官方网站:https://www.omron.com/
相关代码,程序地址:http://lanzouw.top/656958907731.html















 533
533











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









