






plc控制伺服电机 四轴攻丝机案例(包含伺服接线图)
该程序为plc控制伺服电机的工程案例程序,包含伺服电机接线图,包含程序流程的详细解释说明可。
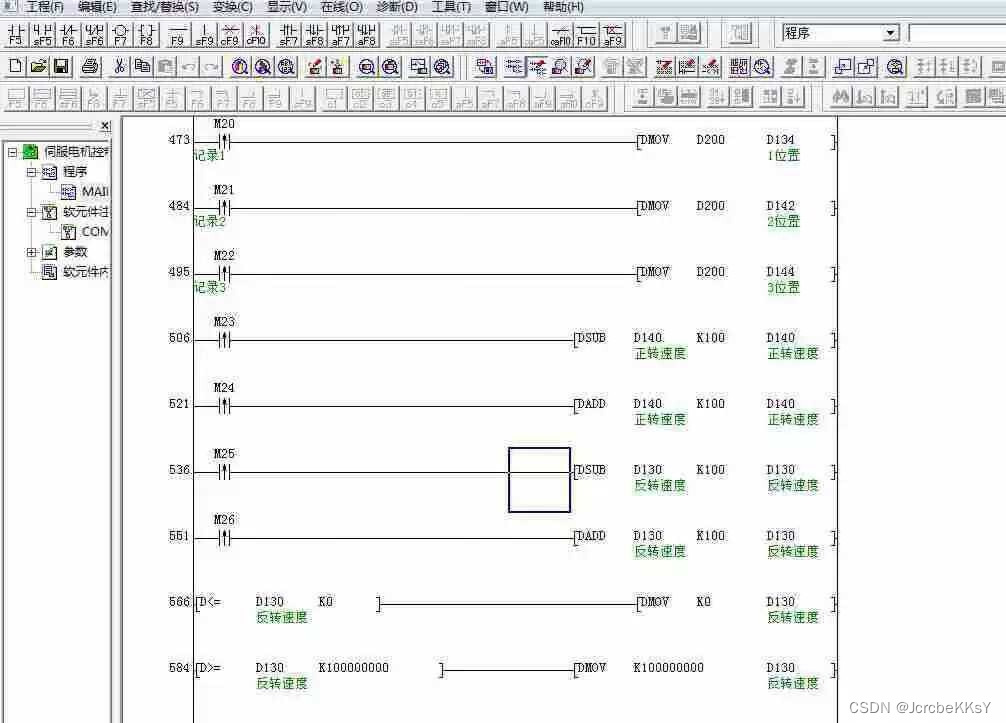
程序包括伺服电机的启动,停止,原点定位,回归原点,位置控制以及方向控制。
包括了所有控制伺服电机的指令,里面有指令的用法的详细解释和程序说明。
包括文本屏程序,拿来就能用的案例程序。
定位,就是以多快的速度到达什么地方。
定位,就是有两个物理量需要控制,速度和位置,也就是脉冲频率和脉冲数,所以定位指令的实质就是对脉冲数和脉冲频率的控制。
因此,定位指令的学习就是学习如何控制脉冲数和脉冲频率。
学习PLC最大的障碍就是指令的学习,而PLC学习者最大的误区就是喜欢钻研指令。
指令是要有目的的学,要结合课程中程序结合案例,在本套程序案例中学习,就会轻松快速的掌握。



PLC控制伺服电机 四轴攻丝机案例(包含伺服接线图)
摘要: 本文介绍了一种基于PLC控制的四轴攻丝机案例程序,详细解释了伺服电机接线图以及程序流程。该程序实现了伺服电机的启动、停止、原点定位、回归原点、位置控制以及方向控制。文中包括了所有控制伺服电机的指令,并对指令的用法进行了详细解释和程序说明。此外,还提供了文本屏程序,方便读者快速上手使用。通过学习本案例,读者可以轻松快速掌握定位指令的学习,理解如何控制脉冲数和脉冲频率。
引言: PLC(可编程逻辑控制器)在工业自动化领域中广泛应用,其在机械加工行业的应用尤为突出。作为一种可编程控制器,PLC可以实现对伺服电机的精确控制,提高设备的工作效率和生产质量。本文针对四轴攻丝机的案例,详细介绍了PLC控制伺服电机的实现原理和程序设计。
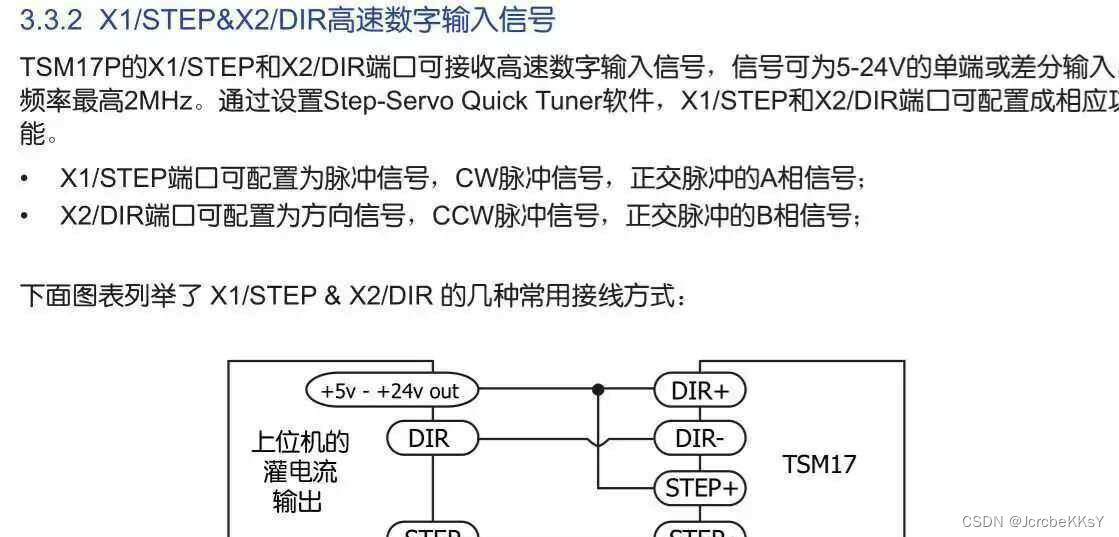
一、伺服电机接线图 伺服电机是一种专门用于位置及速度控制的电动机,其接线图如下所示(图1): (这里可以插入一个伺服电机接线图的示意图)
伺服电机的接线图包含了电源接口、信号接口以及编码器接口。通过对不同接口的连接,可以实现对伺服电机位置和速度的精确控制。
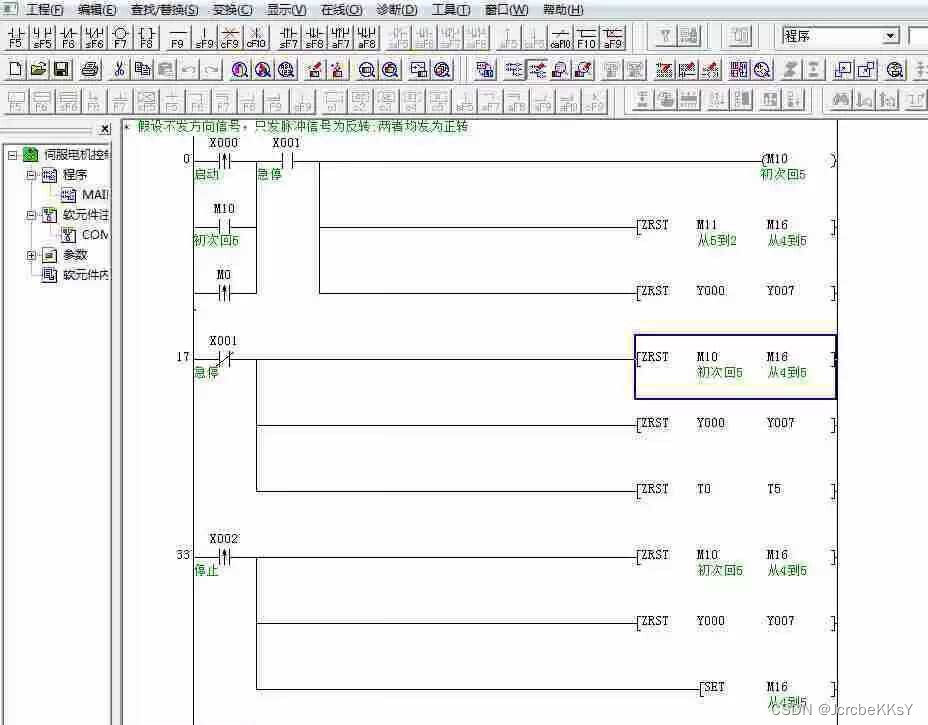
二、程序流程详解
-
伺服电机的启动 伺服电机的启动是通过给伺服电机供电来实现的。在程序中,我们可以通过设置相应的输出口来控制伺服电机的供电,使其启动。启动伺服电机前,必须先确保电机的连接正确,并进行相应的参数设置。
-
伺服电机的停止 伺服电机的停止是通过断开电机供电来实现的。在程序中,我们可以通过将相应的输出口置为低电平来实现伺服电机的停止。停止伺服电机时,需要注意减速并且停止电机供电,以保证设备的安全性。
-
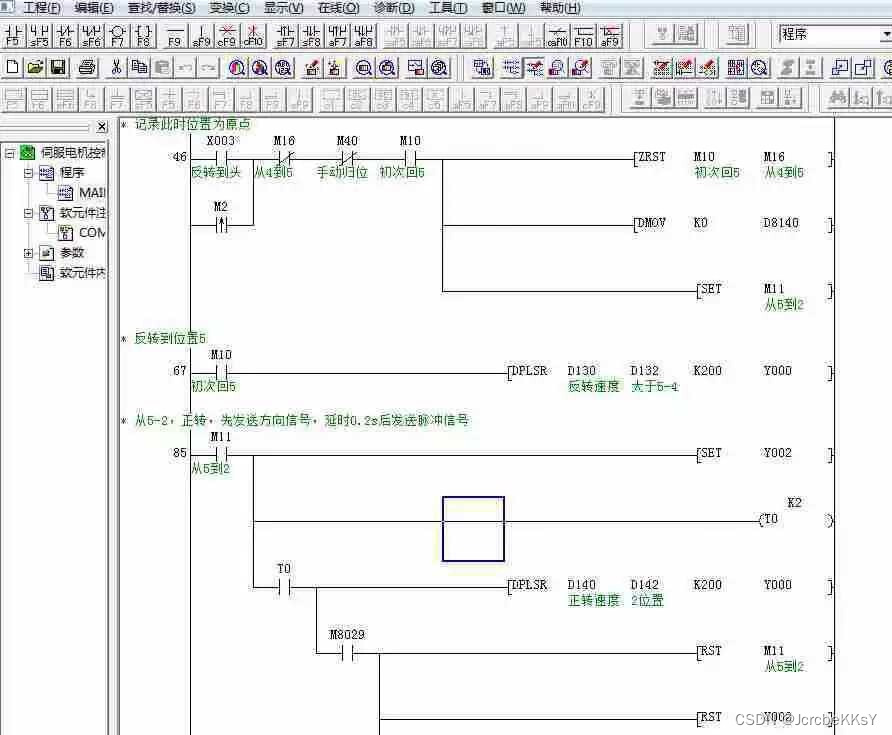
伺服电机的原点定位 原点定位是将伺服电机移动到事先确定好的原点位置上。在程序中,我们可以通过设置相应的控制指令,控制伺服电机按照设定的运动曲线进行移动,最终到达原点位置。
-
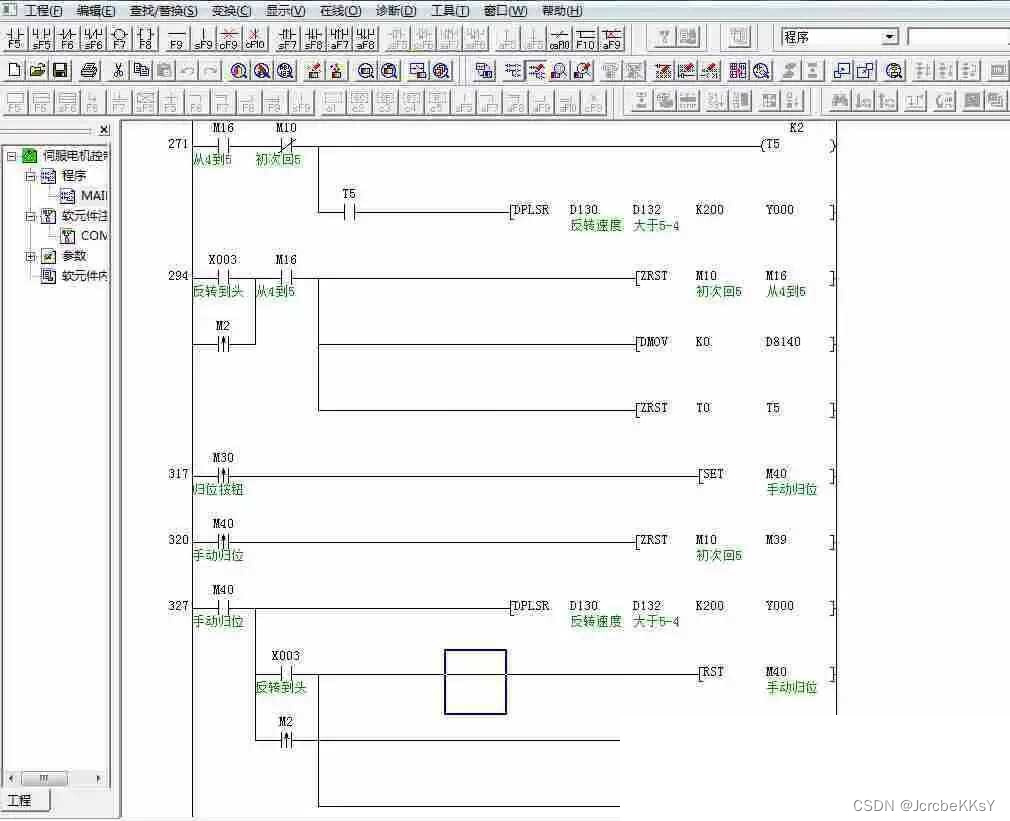
伺服电机的回归原点 回归原点是将伺服电机从任意位置恢复到原点位置。在程序中,我们可以利用编码器提供的位置信息,通过控制指令将伺服电机移动到原点位置。
-
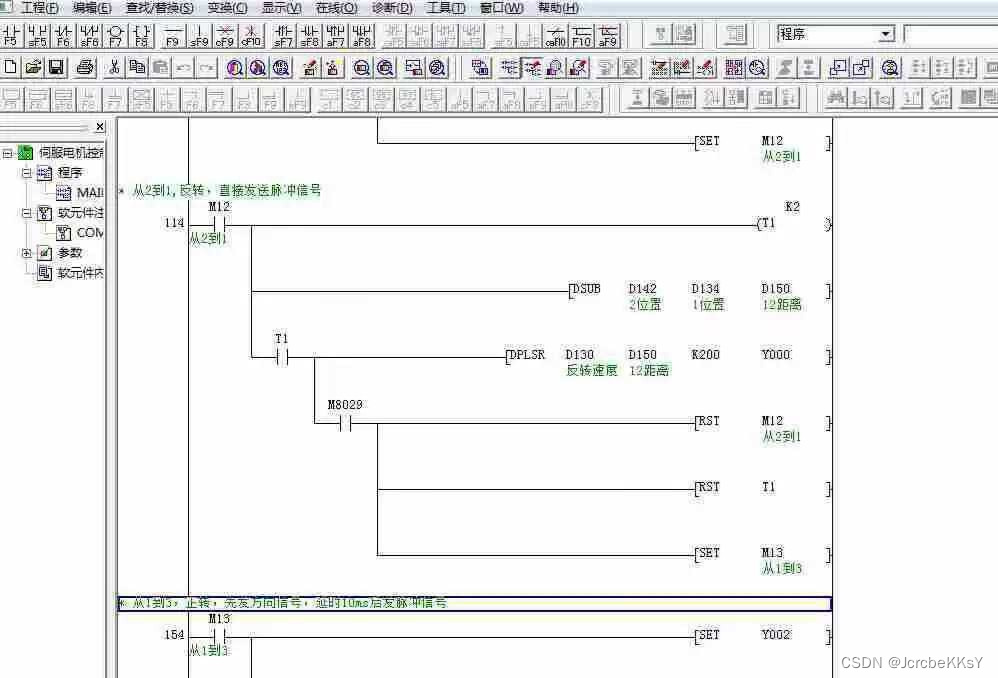
伺服电机的位置控制 位置控制是将伺服电机移动到指定的位置上。在程序中,我们可以通过设置相应的控制指令,控制伺服电机按照设定的运动曲线进行移动,最终到达指定的位置。
-
伺服电机的方向控制 方向控制是控制伺服电机按照设定的方向进行运动。在程序中,我们可以通过设置相应的控制指令,控制伺服电机按照设定的运动方向进行移动。
三、控制指令详解
-
脉冲数控制 脉冲数控制是控制伺服电机按照设定的脉冲数进行移动。在程序中,我们可以通过设置控制指令的参数,控制伺服电机的脉冲数,从而实现对位置的控制。
-
脉冲频率控制 脉冲频率控制是控制伺服电机按照设定的脉冲频率进行移动。在程序中,我们可以通过设置控制指令的参数,控制伺服电机的脉冲频率,从而实现对速度的控制。
四、结论与展望 本文介绍了一种基于PLC控制的四轴攻丝机案例程序,详细解释了伺服电机接线图和程序流程。通过学习本案例,读者可以了解伺服电机的启动、停止、原点定位、回归原点、位置控制以及方向控制等功能的实现原理和具体操作步骤。此外,文中提供了可直接使用的案例程序,方便读者在实际应用中快速上手。本文对定位指令的学习和掌握进行了详细解释,并强调了结合课程中程序结合案例的重要性。在今后的工作中,我们将进一步完善案例程序,提供更多实例和细节,为读者提供更全面的学习资源。
相关代码,程序地址:http://lanzouw.top/635953415877.html


















 3326
3326

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









