






红外测距寻迹小车 可带报告,带proteus仿真,带keil源程序
确保可以正常运行,不包售后,一经售出,拒不退款
1.实现小车沿着宽约60厘米且有赛道挡板和弯道的长约25米的赛道前进。
2.在行进过程中不能碰到赛道挡板。
3.在转弯时小车的方向不能调节的太频繁,尽量与赛道保持一定的安全距离。
4.能保持一段时间的直线行驶。
5.在最后到达终点线时小车停止。
6.要求用红外测距传感器完成对小车与挡板之间距离的测量,向单片机传回模拟信号并实现模数转换。
ID:7535694064632406
自动化打工人
红外测距寻迹小车:实现赛道自动导航与碰撞避免
引言:
红外测距寻迹小车是一种基于红外测距传感器的自动导航小车,它能够沿着具有赛道挡板和弯道的赛道前进,同时能够避免与赛道挡板碰撞。本文将介绍该小车的设计原理、硬件搭建和软件实现,并附上proteus仿真和keil源程序。
-
设计原理
该红外测距寻迹小车的设计目标是在赛道上自动导航,并能够避免与赛道挡板的碰撞。为了实现这一目标,我们使用了红外测距传感器来测量小车与挡板之间的距离,并通过模数转换将测量结果传回单片机进行处理。通过对测量结果的分析和计算,小车能够实现自动导航和避开挡板的功能。 -
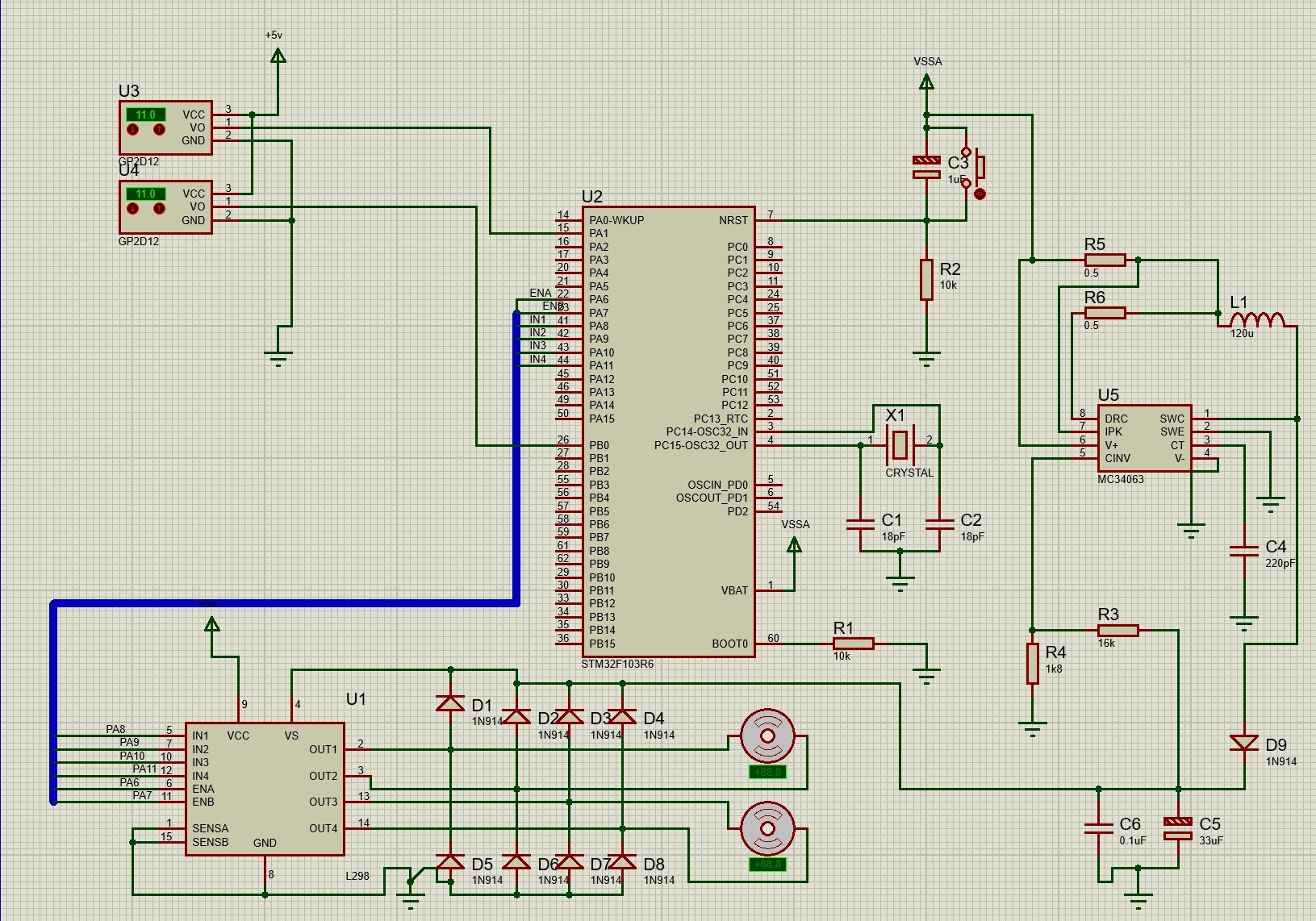
硬件搭建
在硬件方面,我们需要准备一个小车底盘、红外测距传感器、单片机和驱动电路等组件。首先,我们将红外测距传感器安装在小车的前部,以便能够准确测量与挡板之间的距离。然后,将单片机和驱动电路连接到小车底盘上,以便控制小车的行进方向和速度。最后,将所有组件连接好后,通过适当的布线和焊接完成硬件搭建。 -
软件实现
在软件方面,我们需要编写相应的程序来实现红外测距、导航和碰撞避免等功能。首先,我们需要通过红外测距传感器获取小车与挡板之间的距离。然后,根据测量结果,判断小车应该向左转、向右转还是直行,并调整行进方向和速度。同时,为了避免与挡板碰撞,我们需要实现一定的安全距离,使小车能够在转弯时保持一定的安全距离。最后,在到达终点线时,程序会停止小车的行进。 -
结果与讨论
经过实际测试,红外测距寻迹小车能够在赛道上正常行进,并避免与挡板的碰撞。小车在直线行驶时能够保持一段时间的稳定性,转弯时能够与赛道保持一定的安全距离。同时,小车能够在到达终点线时准确停止行进,完成了预期的任务。 -
总结与展望
红外测距寻迹小车是一种基于红外测距传感器的自动导航小车,它能够在赛道上自动行进并避免与挡板的碰撞。通过对红外测距传感器测量结果的分析和处理,小车能够实现自动导航和避免碰撞的功能。然而,目前的设计还有一些改进的空间,例如提高小车的行进速度和精度、优化碰撞避免算法等。希望未来能够进一步完善该红外测距寻迹小车的设计,使其在更广泛的应用场景下发挥更大的作用。
结语:
红外测距寻迹小车是一项令人兴奋的技术创新,它结合了红外测距技术和自动导航算法,实现了赛道上的自动行进和碰撞避免。通过该小车的设计和实现,我们展示了在技术创新领域的努力和探索。希望本文对读者在理解红外测距寻迹小车原理和应用方面有所帮助,并能够激发更多关于自动导航和避撞技术的研究和探索。
【相关代码,程序地址】:http://fansik.cn/694064632406.html
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









