






实践制作DIY- GC0037-汽车大灯随动系统
一、功能说明:
基于STM32单片机设计-汽车大灯随动系统
二、功能介绍:
角度采集板:STM32F103C系列最小系统+电位器(模拟车头方向盘角度)+CAN通讯模块
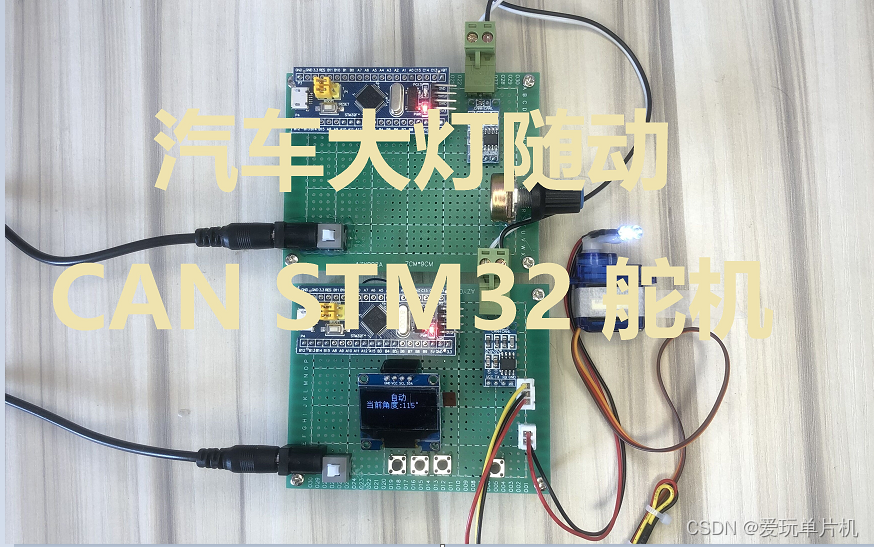
舵机控制板:STM32F103C系列最小系统+5V舵机(0~180度)+CAN通讯模块+4个按键(自动/手动 角度+ 角度- LED开关)+1个LED灯模拟汽车的大灯+OLED显示大灯的角度和工作模式
1.两款电路板使用CAN总线进行通讯。
2.采集板可以采集电位器的0~3.3V对应0~-180,然后通过CAN总线发送给舵机控制板。
3.舵机控制板在自动模式下,根据角度采集板上传的角度控制舵机。
4.舵机控制板可以通过按键选择自动和手动模式。
5.手动模式可以通过角度+ 角度-手动调整舵机的角度。
6.有LED开关键,点击后可以开关LED灯.
7.OLED显示大灯的角度和工作模式
三、详情介绍:
视频讲解:哔哩哔哩搜索UP主“爱搞单片机”在其空间搜索关键词“汽车大灯随动系统”观看该视频详解讲解
功能演示操作:
这是一款基于STM32单片机汽车大灯随动系统。采用角度采集板:STM32F103C系列最小系统+电位器(模拟车头方向盘角度)+CAN通讯模块
舵机控制板:STM32F103C系列最小系统+5V舵机(0~180度)+CAN通讯模块+4个按键(自动/手动 角度+ 角度- LED开关)+1个LED灯模拟汽车的大灯+OLED显示大灯的角度和工作模式
1.两款电路板使用CAN总线进行通讯。
2.采集板可以采集电位器的0~3.3V对应0~-180,然后通过CAN总线发送给舵机控制板。
3.舵机控制板在自动模式下,根据角度采集板上传的角度控制舵机。
4.舵机控制板可以通过按键选择自动和手动模式。
5.手动模式可以通过角度+ 角度-手动调整舵机的角度。
6.有LED开关键,点击后可以开关LED灯.
7.OLED显示大灯的角度和工作模式
具体测试方法观看视频详细介绍。。。
















 1565
1565











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









