









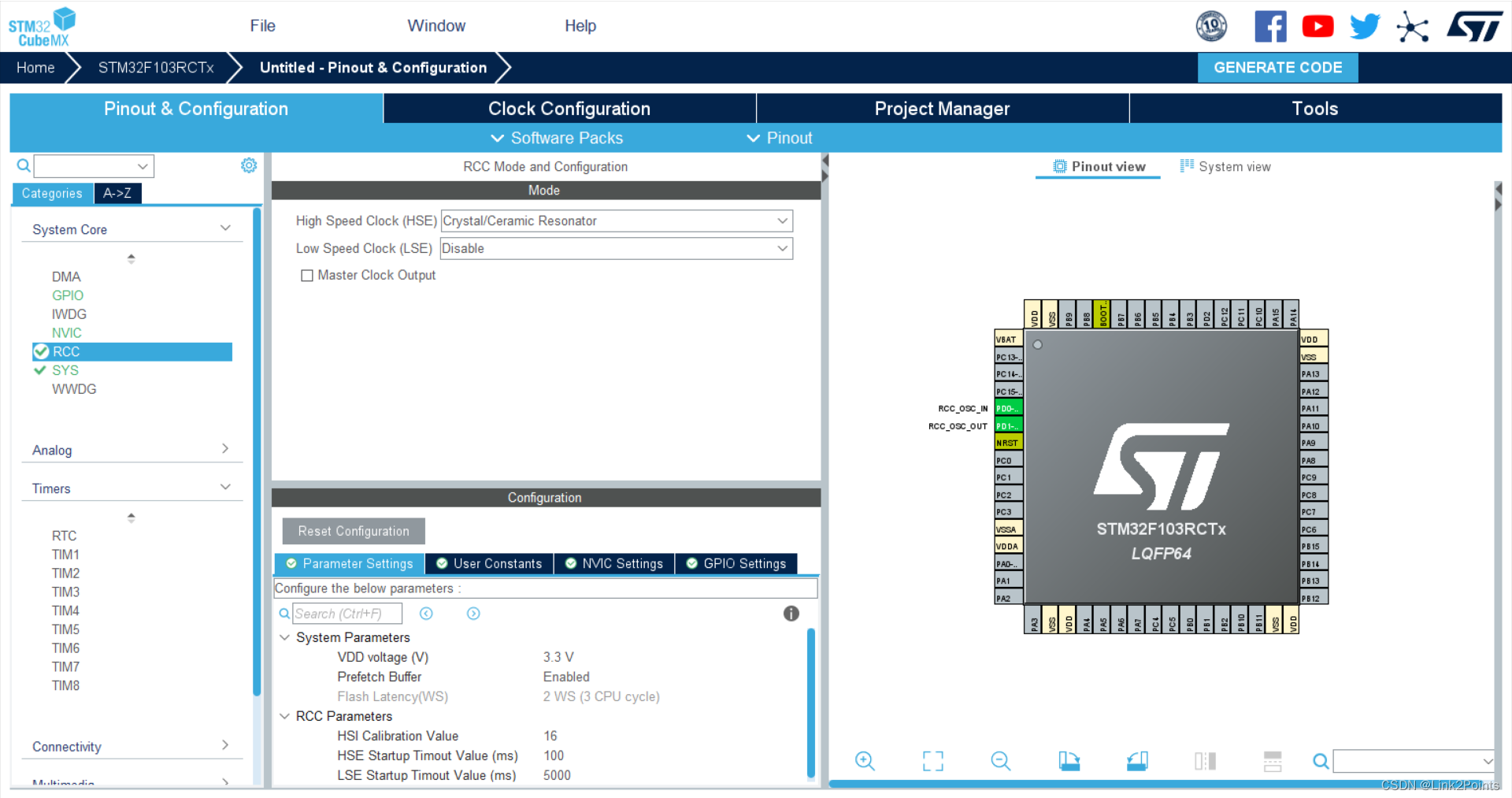
CubeMX配置
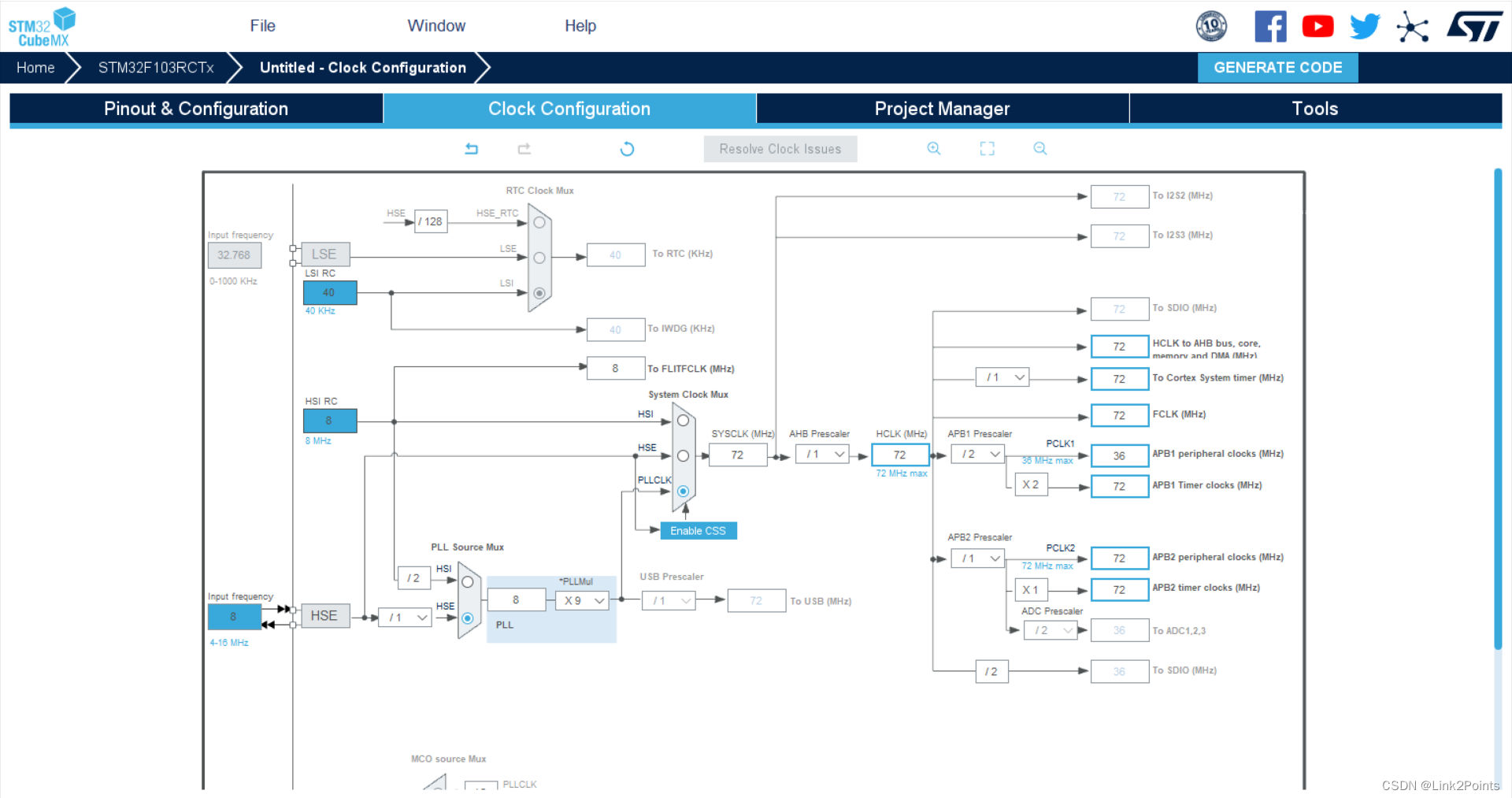
时钟配置
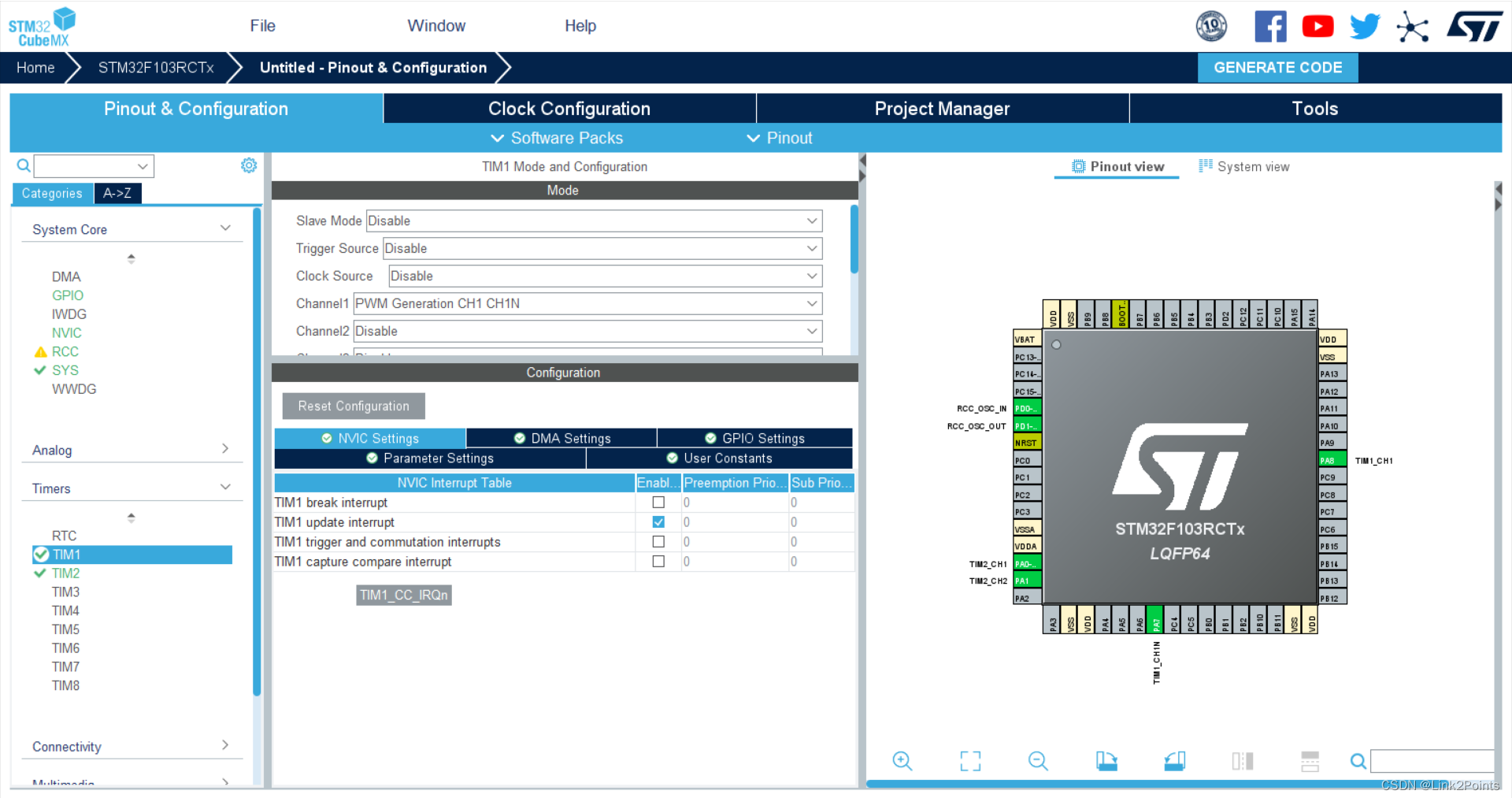
PWM
互补输出
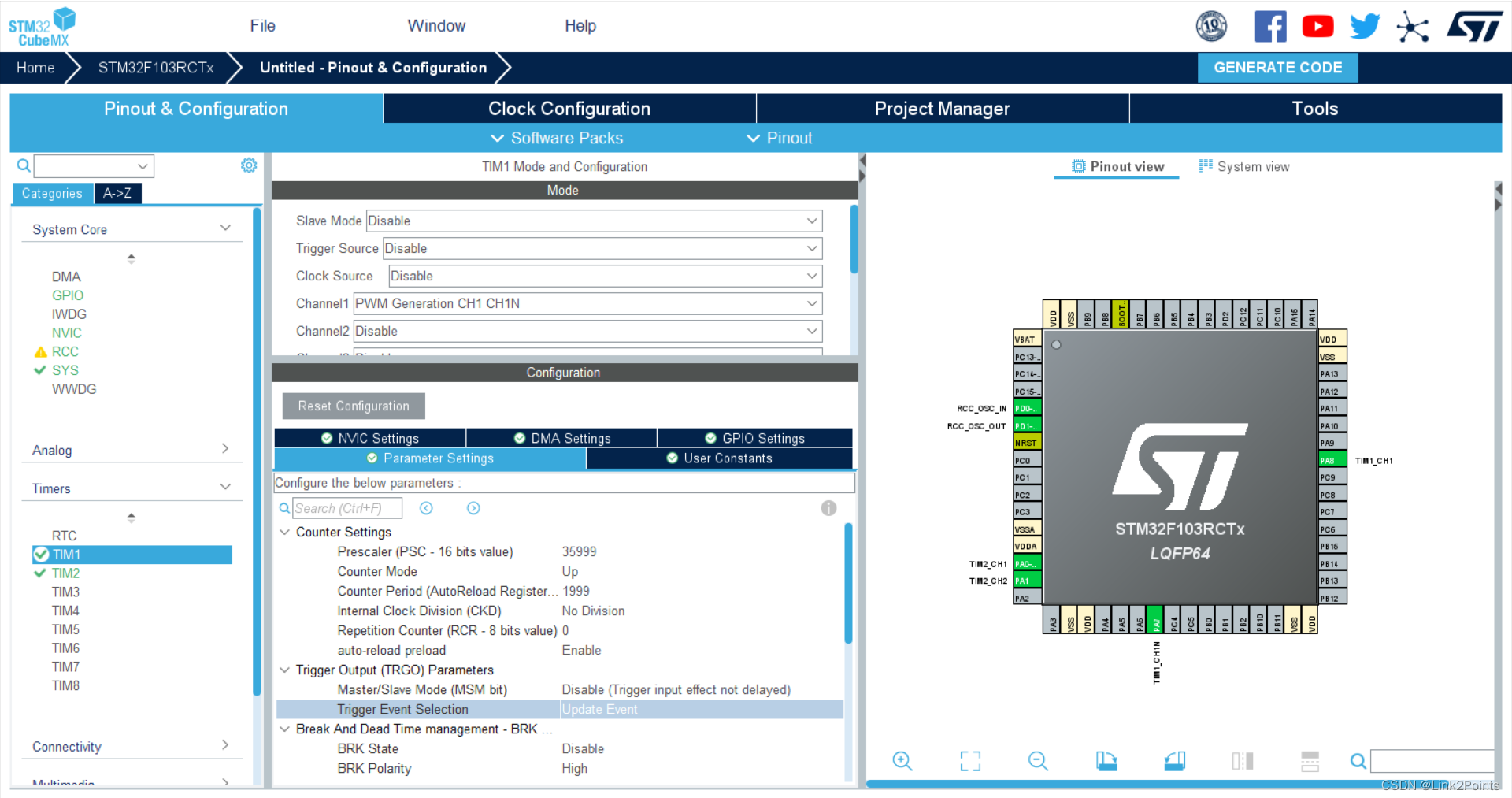
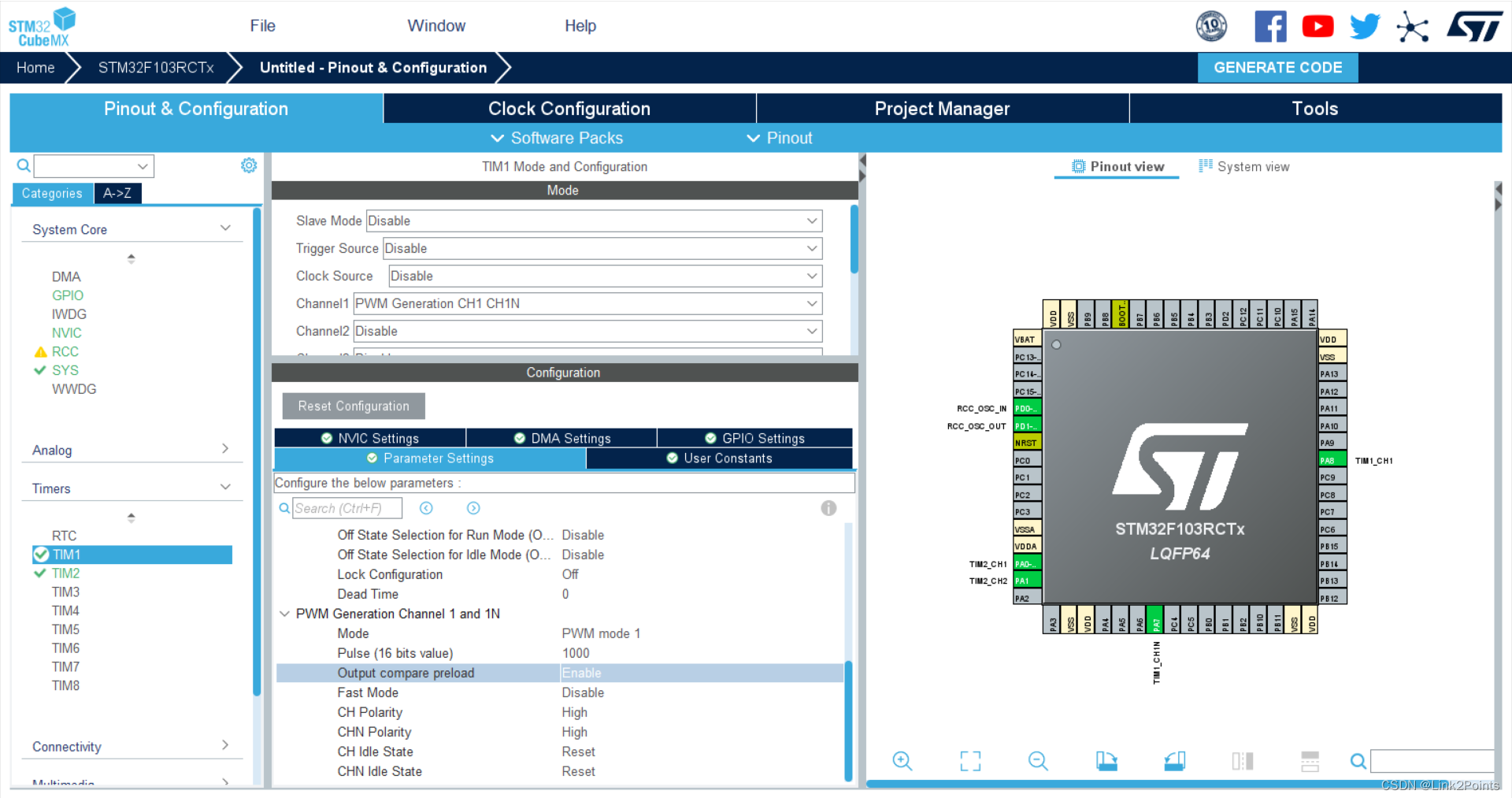
开启中断
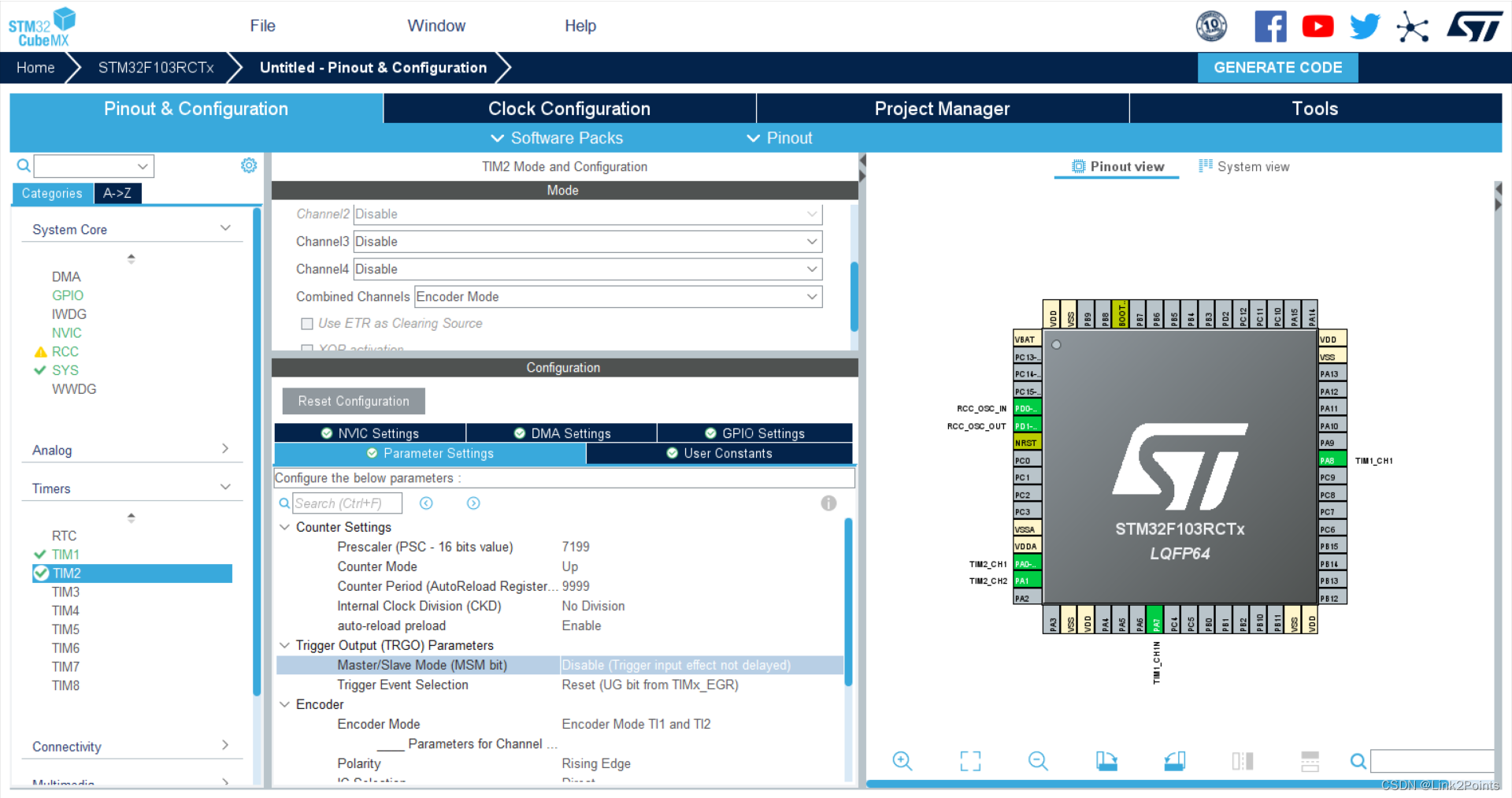
Encoder
计数10000次自动重载
开启中断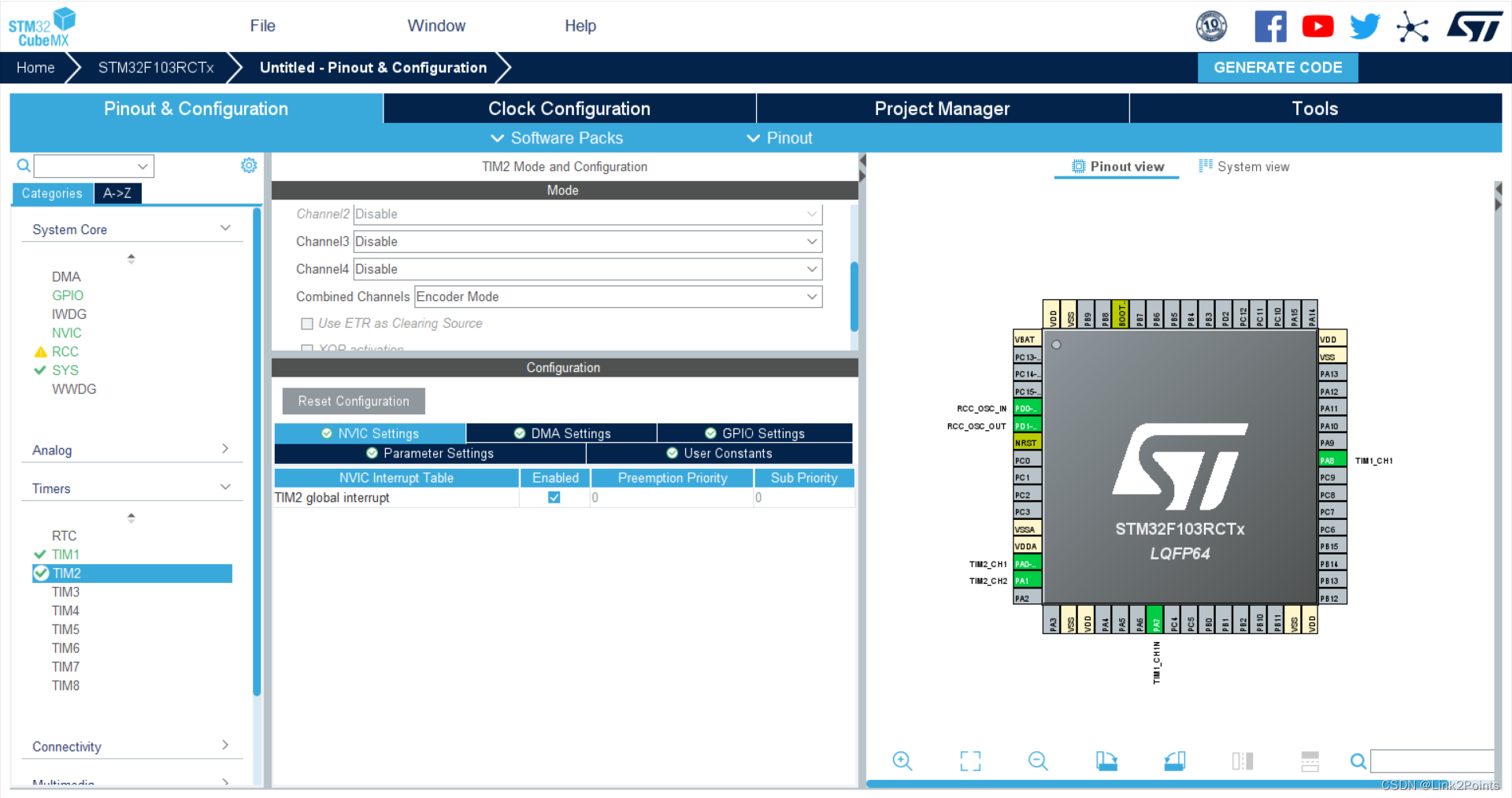
编码
main.c
tim1初始时设置捕获值和是否开启通道应视情况
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM1_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 0);
HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_1);
// HAL_TIM_OC_Start(&htim1, TIM_CHANNEL_1);
{
__HAL_TIM_ENABLE(&htim1);
__HAL_TIM_MOE_ENABLE(&htim1);
}
// HAL_TIM_PWM_Start_IT(&htim1, TIM_CHANNEL_1);
{
__HAL_TIM_ENABLE_IT(&htim1, TIM_FLAG_UPDATE);
}
HAL_TIM_Base_Start(&htim2);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
stm32f1xx_it.c
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
if (uwTick % 10000)
{
uint32_t cnt = __HAL_TIM_GetCounter(&htim2);
}
/* USER CODE END SysTick_IRQn 1 */
}
/**
* @brief This function handles TIM1 update interrupt.
*/
void TIM1_UP_IRQHandler(void)
{
/* USER CODE BEGIN TIM1_UP_IRQn 0 */
if (__HAL_TIM_GET_FLAG(&htim1, TIM_FLAG_UPDATE))
{
}
/* USER CODE END TIM1_UP_IRQn 0 */
HAL_TIM_IRQHandler(&htim1);
/* USER CODE BEGIN TIM1_UP_IRQn 1 */
/* USER CODE END TIM1_UP_IRQn 1 */
}


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









