







目录
一、文档概述
1.1 文档目的
本文档介绍dsp开发过程的具体步骤,目的在于让读者了解dsp开发的流程,快速掌握dsp开发的基本步骤和逻辑。
1.2 文档范围
本文档主要范围包括:
- dsp开发环境搭建
- arm端rpc接口调用
- opencv生成配准矩阵
- gdc模块调用方法
- dsp端空间映射
- 图像处理基本概念(滤波、腐蚀、膨胀)
- dsp端乒乓buf管理
- dsp端tile处理
- dsp端SIMD处理逻辑
对图像处理感兴趣的同学,对融合算法感兴趣的同学,对SIMD优化感兴趣的同学,对技术和工程思维感兴趣的同学......
二、 dsp开发环境配置
参考SVP2.0开发指南,第二章DSP开发指南详细介绍了工具的安装与配置;至于激活的流程,购买license后也会有详细的说明,主要就是把license导入即可。具体文档信息参考文末附件。关于license的问题,如果有问题可以寻求官方支持,他们会给出详细的解答。
3.1微光和热成像图像配准
由于融合的数据存在fov上的差异,所以在数据融合之前需要做图像配准的工作。具体来说,微光的原始分辨率是1024*768,假设FOV为A,热成像数据原始分辨率是640*512,假设FOV为B。由于FOV和分辨率的不同,在图像融合前,需要对图像做配准。
图像配准的基本逻辑包括:1、分辨率不同,相同的物体大小不一样,通过配准矩阵相同物体在图像上像素点也一样;2、FOV不同,通过配准矩阵,对FOV进行矫正。
配准矩阵即使投影变换映射函数,实现平面图像的投影变换。表达式如下:

其中,x,y 为输入图像坐标,x’,y’为输出图像坐标,该矩阵表示的是根据输出坐标计算得到的输入坐标。m0,m1,m3,m4分别表示图像的缩放尺度和旋转量;m2表示图像在水平方向上的位移;m5表示图像在垂直方向上的位移;m6、m7表示图像在水平和垂直方向上的形变量。m8为权重因子,在归一化条件下,m8恒为1。更多细节内容参考文末的GDC调试指南。
如何获取上述的配准矩阵呢?我们可以利用opencv得到相关的配准矩阵。
输入两张图片,右击选择匹配的特征点,最后就会输出配准后图像和融合的效果以及相关的矩阵。需要特别注意:
- 输出的矩阵和上面描述的矩阵是互逆矩阵,所以不能直接使用;
- 使用的时候,矩阵需要乘上一个系数524288。
- gdc输出和输入是同分辨率的,所以配准的时候也要将数据缩放到同分辨率
如何利用矩阵生成配准后的图像呢?这里需要调用gdc的模块接口了,具体接口ss_mpi_gdc_add_pmf_task,其中前后依赖的接口及参数不做详细介绍了。具体可以参考文档MPP媒体处理软件V5.0开发参考。
至此我们得到了待处理的数据,下一步就可以调用arm的接口给dsp喂数据了。
DSP应用程序开发框图如下:
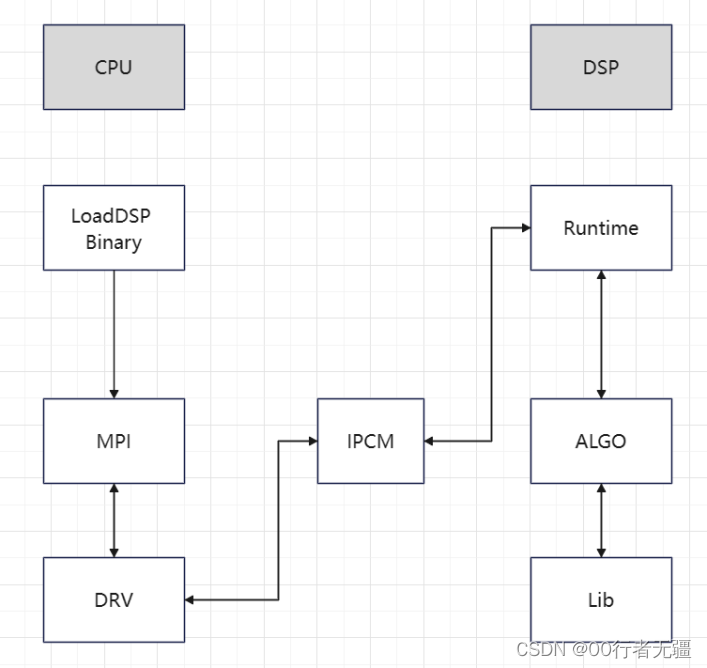
图1 dsp开发框架图
如上图所示,在arm端需要加载dsp bin文件,调用rpc远程接口将数据送到dsp处理。
arm端提供的接口参考文档SVP2.0 API参考 第四章内容,总共提供7个api接口。包括power_on/off,load_bin,enable/disable_core,dsp_rpc/dsp_query。本文重点介绍dsp_rpc接口,其他接口相对简单,文档也有说明。
td_s32 ss_mpi_svp_dsp_rpc(ot_svp_dsp_handle *handle, const ot_svp_dsp_msg *msg, ot_svp_dsp_id dsp_id, ot_svp_dsp_pri pri);
handle 为输出参数,可用于状态查询;
msg为传递的消息体,dsp主要就是解析这部分内容获取待处理的数据;
dsp_id DSP id号,有两个dsp核可以使用;
pri 表示任务的优先级;
arm 端需要把待处理的数据放到body里面,传递到dsp。Body是一片物理地址,依次将需要传递的内容拷贝到这里面,比如我们需要放两个帧结构的数据和融合算法需要的映射矩阵,就一次把这些内容拷贝过去,然后调用rpc接口将数据发送到dsp端。需要注意的是,数据body不能太大。DRAM端总共的内存也就两片,共计100KB + 118KB。
四、dsp端开发工作
4.1数据解析
在arm端调用远程rpc接口后,程序的控制权就流到了dsp模块。dsp端首先要做的就是解析arm传递过来的数据。这里就是msg的地址,把这个地址当作内存流来处理,按照arm端数据填写的方式,顺序解析就可以了。有一点特别重要,arm和dsp的地址空间是不同的,不能直接解析,需要做地址的转化。具体方法就是将传入的body物理地址加上一个固定的offset就偏移到DRAM的物理地址空间,然后再使用dma将数据拷贝下来,dsp再根据当时填充的结构去解析就可以了。
这里有一点需要特别注意的,arm端的指针是8字节的,而dsp端的指针是4字节的。再计算结构体大小的时候,要特别注意,否则会导致解析错误。
DRAM空间受限,需要把数据分割开做处理。将数据划分为多个大小相同的tile单元做处理。数据拷贝的时候是采用乒乓buffer的方式,即数据copy到bufferB,同时在处理A; 然后再将数据copy到BufferA,同时处理bufferB。即相同的时刻,同时在copy和处理数据,从而提高并行度。大体的数据处理流如下:
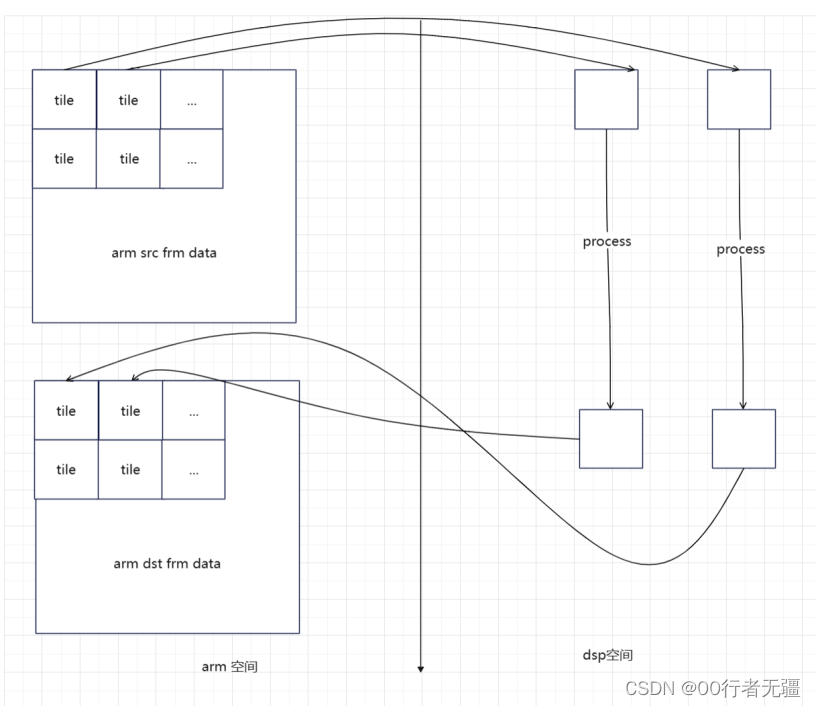
图2 arm/dsp空间数据传输处理示意
需要注意的是dsp端的tile有两种结构xv_tile和xi_tile,结构差别不大,数据传输的时候使用的是xv_tile;数据处理的时候使用的是xi_tile。tile最重要的是需要补边,不同的处理需要补边的大小不同,依据需求而定。
数据传输的过程中遇到一些困难,为了不破坏原来的tile结构体,不好将一个tile绑定多个数据源。因此底层的数据结构没有修改,而是在接口层做了处理,一次可以传输多个数据源。这部分代码处理较冗余,目前没有修改。
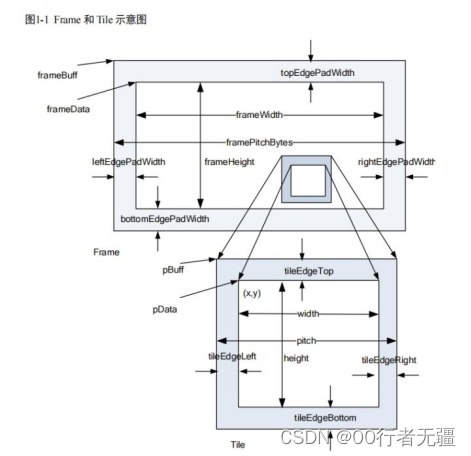
图3 xv_tile示意图
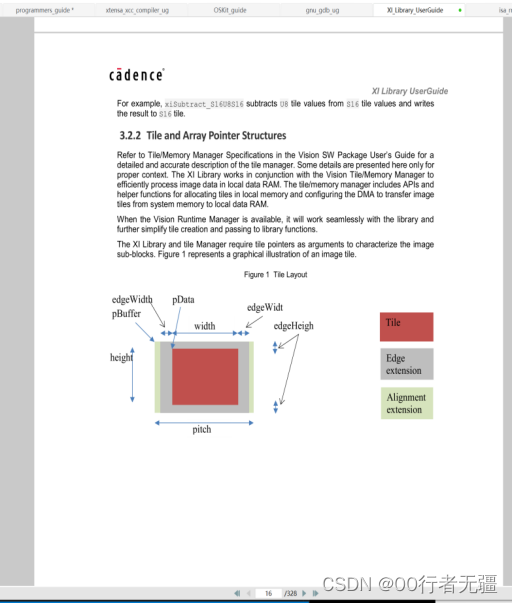
图4 xi_tile示意图
具体算法从略。
这里想分享一个移植的时候遇到的问题,有很多模式,到底先移植哪一个模式的问题。当时想先移植mode 2,觉得这个模式如果走通,其他的模式应该都没有问题了。后来遇到很多困难,才回头确定先把最简单的mode 3做出来,然后再一步步逐步增加难度,不要上来就挑战地狱模式。
刚开始移植完成的时候,测试了下运行的时间,最慢的mode 2处理一帧数据要20+秒,当时心想完了,这要跑到实时,一帧数据数据处理时间是40ms,这中间有500+倍的差距,这能做到吗?和军哥沟通后,看了代码,首先编译的时候没有开启优化选项,把这个打开后,处理时间缩短了10倍,降到了2~3秒。这个时候感觉离目标不远了,还是有希望做到的,毕竟现在dsp最大的性能优化点SIMD利器还没有用起来。
刚开始做的时候也走了一些弯路,想直接调用xtensa提供的IVP操作接口,这个操作接口很不好用,文档也没有,完全不知道IVP操作接口入参的含义。后来找FAE帮忙才找到了一条可行的道路,FAE说libxi库是xtensa帮助客户封装好的各种图像处理接口,不用用户再从新造轮子。于是决定直接调用libxi库,第一、可以省去造轮子的时间(能不能造出来也是问题);第二、这些库提供了足够丰富的图像处理接口,常见的操作都有比如:各种滤波器,中值、均值、高斯,也支持窗口大小调整;canny边缘检测、tile数据的加减乘除,带权的加减几乎都有。
使用libxi提供的API接口对图像做相关的处理后,优化效果非常明显,最耗时的mode 2直接优化到25ms左右。然而这些接口的使用也不是一帆风顺的,由于使用的问题也带来一些问题,比如高斯滤波后,tile单元的最下方会有横线,canny检测后也会有些竖线,横线之类的问题。至于这部分问题的解决还是先确定了问题出在调用方,而不是xtensa的问题,然后排查入参,最终解决了上述问题。
五、总结回顾
回顾开发的整个过程,遇到了一些问题,记录如下
- arm和dsp数据传输的问题,dsp和arm端数据解析不一致。把内存dump出来发现数据是一样,后来才发现原来是指针字节数不一样导致的,arm端是64位系统,指针占8个字节;dsp端32位系统,指针占4字节。没有注意到这个问题解析出错。
- Tile数据处理方式主要包括兵乓buffer的使用,tile数据扩边,还有一个至关重要的内容就是一个tile绑定一个物理地址,这个是tile结构决定的。后面处理的时候没有打破这个数据结构,而是修改了接口,以前的接口只转递一个tile,现在改为传递多个tile,复用乒乓结构,拷贝数据的时候是独立拷贝的。这里需要特别注意数据copy的宽高、跨距、源地址、目的地址。如果不留意就会出错,uv的高度是y的一半,源和目的都会有所不哦她那个。另外,这里代码有很多冗余,后期可以做继续的调整。
- 数据搬运过程遇到过一些问题,dsp的调试比较困难,因为它是把整帧数据分开处理,不好看中间处理的结果。调试的时候,采用的方法是将中间结果直接传出的方式,来看效果。这个在调试过程种起到很大作用。
- 调用libxi库的时候,遇到最大的一个问题就是滤波之后再做canny检测,结果就不对了,tile的边缘会被检测为边缘。这个问题也是思索很久,因为做过滤波的数据放到一个新的buf里面,而这个buf是没有补边的,所以就被检测出边缘了。关于这个问题的解决,可以再多谈谈当时定位问题的思路。Libxi库是xtensa给的,逻辑上应该是对的,没有问题,但是我不能确定。check了自己的代码,检查了调用流程,因为就是一个api接口,只要入参给的对,那问题应该也不大。但是最终的结果就是不对。当时无法确定问题到底出在哪里,是调用的问题还是库本身的问题呢?直到我调用其他的api接口,发现几乎所有api都不能给出符合预期的结果,于是断定,是调用api的时候,数据没有组织好导致的。从信息论的角度看,要解决一个问题,就需要信息来消除不确定性。这里得到的信息是几乎所有的api都有问题,于是得到数据组织有问题。相反,如果遇到问题,盲目胡乱测试一通,时间浪费了,对问题解决也无益。我想这大概也是很多项目延期的原因,看似忙的一塌糊涂,却做了很多无用功。
- 配准矩阵的摸索,opencv先做出一个配准矩阵和效果,然后尝试给hisi gdc模块使用,最终得到了和opencv相同的结果,这里也踩了一些坑,这里最大的问题是并不清楚配准矩阵的workflow。有如下的问题需要解决:1、opencv得到的配准矩阵和hisi的硬件兼容吗?2、计算配准矩阵的时候输入原始数据的分辨率是否要相同?3、怎么用opencv得到配准矩阵?4、配准矩阵怎么使用,如何嵌入到gdc模块等。这些问题都没有答案,靠着和军哥、永生、红娟,一起摸着石头过河,最终得以解决。
- 移植dsp库的时候,遇到过一个canny检测问题,那个时候使用的是自己的canny算法,得到的结果是tile小块里面,有的是有正常轮廓的,有的轮廓是异常。
如下图所示:
当时也是check了很久,发现代码没有问题,仔细了解了整个算法的逻辑。才知道原来canny检测的时候用到了一个统计信息做阈值。分块tile处理的时候,每一个块的阈值都不同,导致了不符合预期的效果。
其他问题不再一一赘述,后续发现有价值的问题,可以再继续往上加。总之,遇到问题解决问题是一个工程师需要不断修炼的能力。
现在检测的效果上还是有些噪点,后续可以考虑使用其他窗口的滤波器测试。另外现在canny检测的阈值是写死的,后期可以考虑对每帧数据做统计,计算出阈值,将阈值应用到下一帧上去。
现在代码种还有部分处理是没有用SIMD指令的,因为libxi没有相关的接口,这部分需要自己造轮子的。
在开发调试过程中,很多同事、fae给予很大的帮助,这里不能一一表示感谢,而是笼统的向他们表示敬意















 161
161











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









