









计算机网络顶会无线通信类论文解读
NSDI'22 - Enabling IoT Self-Localization Using Ambient 5G Signals
NSDI'22 - Enabling IoT Self-Localization Using Ambient 5G Signals
1. 背景
传统定位方法缺点:
1)GPS芯片功耗高,不适合低功耗物联网使用
2)基于基站的定位精度低(百米级),或需要与基站进行交互以提升精度但需要对基站进行改造
本文提出了一种无需与基站进行交互的定位技术,其利用5G具有较高的带宽实现了高精度的定位,且对硬件的要求较低。
2. 定位原理
2.1 无线定位的基本原理
5G频谱有着更高的带宽,100MHz的带宽定位精度可以达到3m( c / B c/B c/B,c为光速B为带宽),而5G使用的OFDMA子载波间隔 Δ f = 60 K H z \Delta f=60KHz Δf=60KHz,因此定位范围可达5Km( c / Δ f c/ \Delta f c/Δf)。在基站位置已知的情况下,通过获取信号从基站到设备的飞行时间(ToF)和到达角(AoA),从而实现对设备的定位。5G通信中OFDM符号的前导序列可以用来做信道估计,可以获得信道的冲激响应(CIR),但该CIR不能直接计算信号时延,因为该CIR是多径效应叠加的结果,因此可以通过多信号分类(MUSIC)算法来获取LoS分量,从而计算设备距离基站的距离和到达角,进而实现定位。
2.2 宽带信号处理
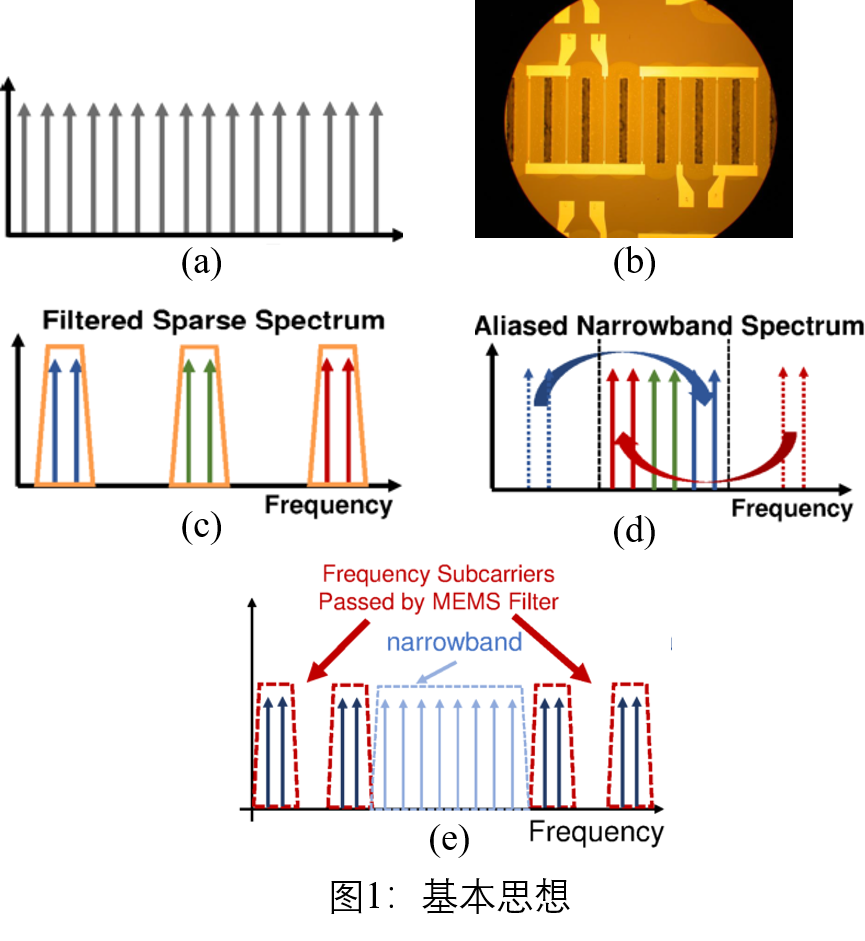
IoT设备的硬件简单,且有着严格的功耗限制,通常不能接收100MHz的高带宽信号。5G中使用的OFDM符号由若干个子载波组成(1024,2048或4096),该符号占据100MHz带宽,如图1(a)所示。本文使用微电子机械系统声学谐振器设计一种脉冲序列滤波器(以下简称该滤波器),该滤波器频域特性如图1(b)所示,其有等间距的脉冲序列组成,脉冲具有一定带宽,在该带宽之内的信号会被保留,脉冲序列之外的信号会被抑制。OFDM符号在过经该滤波器后,仅保留部分子载波,如图1©所示。将滤波后信号经过降采样(本文中使用采样频率6.25MHz,带宽的1/16)后会产生频谱混叠(采样后的频谱原有信号的频谱的周期延拓),混叠结果如图1(d)所示。这样滤波后的子载波就会在一个比较窄的频带内,即在IoT设备的处理范围内,通过估计这些子载波的信道冲激响应(CIR),再从中找出LoS分量后即可测得基站与设备之间的传输延迟进而得出距离完成定位。但需要注意的是,由于该滤波器滤除了部分子载波,使得图1©中子载波密度稀疏,当降采样稀疏为P=16时,即相当于子载波间隔 Δ f \Delta f Δf增大的16倍,使得感知距离减小16倍,即只有312.5m。因此为同时拥有高精度和长距离的定位,除使用前述过程获得高带宽下的CIR外,本文通过直接截取低带宽信号获得原有子载波间隔的子载波集,如图1(f)所示,通过两者的结合来同时保障定位精度和距离。
2.3 获取CIR
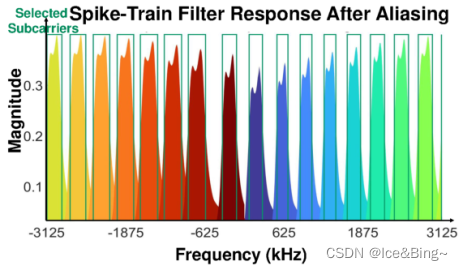
将高带宽但大子载波间隔的子载波集记作 f M f_M fM,将窄带宽窄子载波间隔的子载波集记作 f N B f_{NB} fNB,本文即同时使用两种子载波 f t o t = f M ∪ f N B f_{t o t}=f_{M} \cup f_{N B} ftot=fM∪fNB进行定位,记 f t o t f_{t o t} ftot中的子载波总数为 T T T。首先根据OFDM符号的前导序列计算 f t o t f_{t o t} ftot的CIR h t o t ′ h_{tot}^{\prime} htot′,其是一个 T × 1 T \times 1 T×1维的矢量,但该CIR是多径效应叠加的结果,因此可以使用MUSIC算法从中分离出LoS分量。但由于本文使用的冲激序列滤波器的非理想特性(即脉冲序列的边缘并非陡峭的),会使得降采样后子载波在边界上产生一定的混叠,这会影响CIR估计的精度,因此在估计CIR时仅使用未混叠在一起的部分,如图2所示。可以看到这种对频谱的截取是不均匀的,因此MUSIC算法不再适用,本文将该问题转化为优化问题,从而同样能够得出多径传播下不同路径的时延。
假定多径传播中共有L条路径,则连续信道的CIR为
C
I
R
c
o
n
t
=
∑
l
=
1
L
a
l
δ
(
τ
−
τ
l
)
C I R_{c o n t}=\sum_{l=1}^{L} a_{l} \delta\left(\tau-\tau_{l}\right)
CIRcont=l=1∑Lalδ(τ−τl)
其中
a
l
a_l
al和
τ
l
\tau_{l}
τl分别为第
l
l
l条路径的幅度增益和时延。由于带宽为
B
B
B时定时精度为
1
/
B
1/B
1/B秒,因此实际得到的时延
τ
g
\tau_{g}
τg是离散化的,取值为
τ
g
∈
{
0
B
,
…
,
(
N
−
1
)
B
}
\tau_{g} \in \left\{\frac{0}{B}, \ldots, \frac{(N-1)}{B}\right\}
τg∈{B0,…,B(N−1)},因此离散化的CIR为:
C
I
R
net
(
τ
g
)
=
∑
l
=
1
L
a
l
ψ
N
(
τ
g
−
τ
l
)
C I R^{\text {net }}\left(\tau_{g}\right)=\sum_{l=1}^{L} a_{l} \psi_{N}\left(\tau_{g}-\tau_{l}\right)
CIRnet (τg)=l=1∑LalψN(τg−τl)
其中
ψ
N
\psi_{N}
ψN为离散
s
i
n
c
sinc
sinc函数,表达式为:
ψ
N
(
τ
)
=
sin
(
π
τ
)
sin
(
π
τ
N
)
exp
(
−
π
j
(
N
−
1
N
)
\psi_{N}(\tau)=\frac{\sin (\pi \tau)}{\sin \left(\frac{\pi \tau}{N}\right)} \exp \left(-\pi j\left(\frac{N-1}{N}\right)\right.
ψN(τ)=sin(Nπτ)sin(πτ)exp(−πj(NN−1)
C
I
R
net
C I R^{\text {net }}
CIRnet 为
N
×
1
N \times 1
N×1的矢量,其中N表示一个OFDM符号中子载波总数,求
a
⃗
\vec{a}
a和
τ
⃗
\vec{\tau}
τ可转化为以下L2优化问题:
{
τ
l
∗
,
a
l
∗
}
l
=
1
L
=
arg
min
τ
1
,
…
,
τ
L
,
a
1
,
…
,
a
L
∥
h
t
o
t
′
−
V
F
N
Ψ
a
⃗
∥
2
\left\{\tau_{l}^{*}, a_{l}^{*}\right\}_{l=1}^{L}=\underset{\tau_{1}, \ldots, \tau_{L}, a_{1}, \ldots, a_{L}}{\arg \min }\left\|h_{t o t}^{\prime}-\mathbf{V} \mathbf{F}_{N} \Psi \vec{a}\right\|^{2}
{τl∗,al∗}l=1L=τ1,…,τL,a1,…,aLargmin∥htot′−VFNΨa∥2
其中
Ψ
\Psi
Ψ为
N
×
L
N \times L
N×L矩阵,
Ψ
i
,
j
=
ψ
N
(
τ
i
−
τ
j
)
\Psi_{i, j}=\psi_{N}\left(\tau_{i}-\tau_{j}\right)
Ψi,j=ψN(τi−τj);
F
N
\mathbf{F}_{N}
FN为
N
×
N
N \times N
N×N的DFT矩阵;
V
\mathbf{V}
V为
T
×
N
T \times N
T×N矩阵用于从N个子载波中获取
f
t
o
t
f_{tot}
ftot。
Ψ
\Psi
Ψ已知时,带入
a
⃗
=
(
V
F
N
Ψ
)
†
h
t
o
t
′
\vec{a}=\left(\mathbf{V} \mathbf{F}_{N} \Psi\right)^{\dagger} h_{t o t}^{\prime}
a=(VFNΨ)†htot′,
†
\dagger
†表示求违逆,则上述优化转化为L1优化:
{
τ
l
∗
}
l
=
1
L
=
arg
min
τ
1
,
…
,
τ
L
∥
h
tot
′
−
V
F
N
Ψ
(
V
F
N
Ψ
)
†
h
t
o
t
′
∥
2
s.t.
τ
l
≥
0
∀
l
∈
{
1
,
2
,
…
,
L
}
\begin{aligned} &\left\{\tau_{l}^{*}\right\}_{l=1}^{L}=\underset{\tau_{1}, \ldots, \tau_{L}}{\arg \min }\left\|h_{\text {tot }}^{\prime}-\mathbf{V} \mathbf{F}_{N} \Psi\left(\mathbf{V} \mathbf{F}_{N} \Psi\right)^{\dagger} h_{t o t}^{\prime}\right\|^{2} \\ &\text { s.t. } \tau_{l} \geq 0 \quad \forall l \in\{1,2, \ldots, L\} \end{aligned}
{τl∗}l=1L=τ1,…,τLargmin∥∥∥htot ′−VFNΨ(VFNΨ)†htot′∥∥∥2 s.t. τl≥0∀l∈{1,2,…,L}
可以适用内点法对
τ
⃗
\vec{\tau}
τ进行估计,从而得到ToF。
2.4 获取位置
对设备定位的基本前提是基站位置是已知的,5G基站位置信息很容易通信协议得到。由于5G基站不与IoT设备严格同步,由于硬件电路中存在采样时间偏差(STO),因此2.3节得到的ToF是包含采样偏差的,因此可以在IoT设备上使用两根天线,用差分ToF代替绝对ToF,如图3所示。
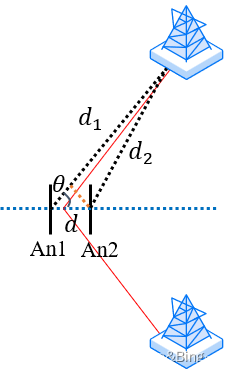
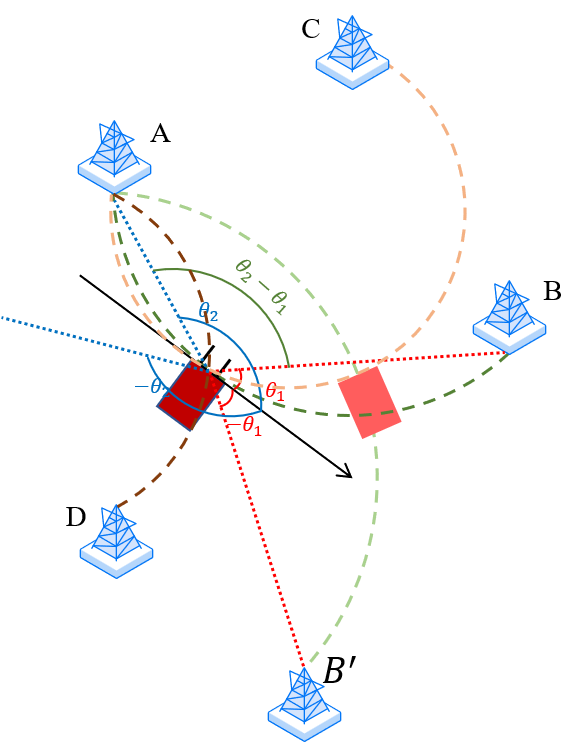
其中 d 1 d_1 d1与 d 2 d_2 d2是2.3节中测得的绝对ToF对应的距离,由于STO的影响,他们都不是基站距离设备的精确距离,但由于两根天线共用一套RF链,有着相同的STO,因此它们的差是恒定的,因此有 d c o s ( θ ) = d 1 − d 2 dcos(\theta)=d_1-d_2 dcos(θ)=d1−d2,其中 d d d为两天线间距,据此可以求出基站与设备天线水平面的夹角 θ \theta θ。但由于该角是相对两天线组成的平面而言的,不是绝对位置,因此借鉴拆分ToF的思想,两基站相对到达角分别为 θ 1 \theta _1 θ1和 θ 2 \theta _2 θ2,则它们的差值 ∣ θ 2 − θ 1 ∣ |\theta _2-\theta _1| ∣θ2−θ1∣为一定值。考虑在圆之中同弧所对的圆周角相同,因此两基站与设备在同一个圆上,如图4所示。
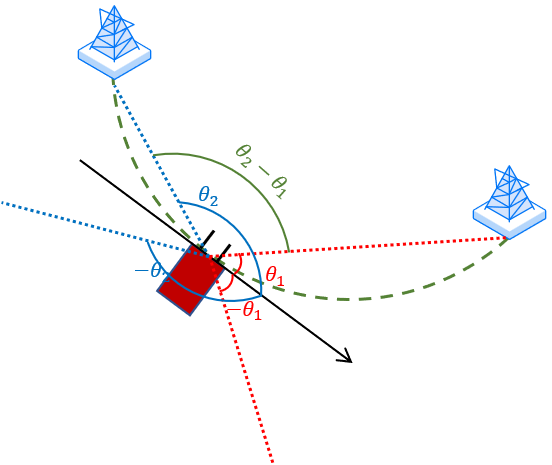
图3中计算得到相对到达角 θ \theta θ无法判定基站位于设备的上(北)面还是下(南)面,这就造成了设备位置模糊性,则图中圆弧对应的夹角不一定是 ∣ θ 2 − θ 1 ∣ |\theta _2-\theta _1| ∣θ2−θ1∣,还有可能是 ∣ θ 2 + θ 1 ∣ |\theta _2+\theta _1| ∣θ2+θ1∣,因此使用三台基站进行定位时就会出现位置模糊性。如图5所示,基站B可能出现在两个位置,此时使用 A B C ABC ABC与 A B ′ C AB'C AB′C进行定位会得到不同的结果。此时使用四个基站进行定位,以其中一个基站作为公共点可得三个圆弧,三个圆弧的交点即为设备位置,这样便可消除模糊性。
三. 其它
- 引理5.1说明了在何种情况下降采样得到的重叠谱会保留原有状态信息:即降采样系数P可以被子载波数N整除;
- 引理5.2说明了满足条件的冲激序列滤波器的参数如何选择
https://www.usenix.org/conference/nsdi22/presentation/jog
















 1826
1826











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











