






关于Ubuntu18.04/20.04安装后的一系列环境配置过程的总结
Updating…
目录
- 关于Ubuntu18.04/20.04安装后的一系列环境配置过程的总结
- 1.注意
- 2.更换国内源
- 3.设置$HOME下文件夹为英文
- 4.禁用Nouveau驱动
- 5.安装Nvidia驱动(有可能会损坏系统,如果损坏可以重装并看看网上的其他教程,除了这种安装方法还有其他安装方法,自行上网了解)
- 6.cuda安装:
- 7.cudnn安装:
- 8.安装ROS(有些图忘记截了)
- 9.安装opencv-3.4.16和opencv_contrib-3.4.16(Ubuntu18.04),Ubuntu20.04请装opencv-4.2.0及其扩展模块:
- 10.安装protobuf2.6.1
- 11.配置OpenBLAS
- 12.配置seetaface2工作空间
- 13.百度智能云
- 14.使在桌面上右键打开终端时进入Desktop目录(Ubuntu18.04)
- 15.同步双系统时间
- 16.启动菜单的默认项
- 17.安装darknet版yolov3及darknet-ros工作空间
- 18.Azure Kinect SDK-v1.4.0的安装(Ubuntu18.04源码编译安装,也可像本小节末尾Ubuntu20.04一样直接使用.deb包安装)
- 19.配置科大讯飞
- 20.配置realsense及realsense工作空间
- 21.配置Kinova机械臂工作空间
- 22.配置机器人导航(实体)
- 23.安装配置caffe
- 24.安装libfreenect2
- 25.安装vtk8.2.0及PCL1.9.1
- 26.安装CarlaUE4(必须是Carla的UE仓库里的carla分支才可以通过安装Carla时的编译)
- 27.安装Carla0.9.13(添加fisheye sensor模块)
- P.S:
本文所有用到的文件打包供大家下载(不含代码){Updating}:
链接:
https://pan.baidu.com/s/1PgmWHKl8oyX_cWYx_uZJrg?pwd=zwz4
提取码:
zwz4
–来自百度网盘超级会员v4的分享
1.注意
刚进入系统一段时间,系统会通知更新到新版本系统(Ubuntu18.04),选择否,之后会询问是否更新系统组件(大概400mb),选择是。
阻止软件更新弹窗:
打开终端输入:
sudo chmod a-x /usr/bin/update-notifier
将关机时间从90秒换为5秒:
打开终端输入:
sudo gedit /etc/systemd/system.conf
将:
#DefaultTimeoutStopSec=90s
改为:
DefaultTimeoutStopSec=5s
保存退出,打开终端输入:
sudo systemctl daemon-reload
打开终端输入:
gedit ~/.bashrc
# 在最后(WARNING:如果安装了Anaconda3,需要加在__conda_setup之前)加入如下代码段:
# 显示git分支
function customizePrompt()
{
local none='\[\033[00m\]' # 重置所有属性到默认状态
local green='\[\033[0;32m\]' # 绿色,用于用户名和主机名
local user_at_host="${green}\[\033[1m\]\u@\h${none}" # 用户名和主机名显示为绿色并加粗
local blue='\[\033[0;34m\]' # 蓝色,用于当前工作目录
local git_branch_color='\[\033[1;43;37m\]' # 黄色背景,白色字体,用于git分支
local command_prompt='$' # 命令提示符
if [ $UID -eq 0 ]; then
command_prompt='#'
fi
local working_directory="${blue}\[\033[1m\]\w${none}" # 当前工作目录显示为蓝色并加粗
# 使用__git_ps1函数来显示当前git分支,使用自定义的颜色
echo "${user_at_host}:${working_directory}\$(__git_ps1 \" ${git_branch_color}[%s]${none} \")${command_prompt} "
}
export PS1="$(customizePrompt)"
# 复制上一个命令到系统剪切板,sudo apt install xsel
function copyLastCommand()
{
# fc获取最后执行的命令,echo发送给xsel复制到剪切板
# -nl以列表形式显示命令历史,但不包括命令编号,-1只获取最近一条命令
echo -n $(fc -nl -1) | xsel --clipboard --input
}
# 创建一个别名,若与你的其他软件包内置命令冲突,请自行更换别名
alias clc="copyLastCommand"
之后保存退出
source ~/.bashrc
这样就可以更清晰的显示git分支~
2.更换国内源
sudo gedit /etc/apt/sources.list
将原本的注释掉,在最下方加入:
# 中科大源(Ubuntu 18.04)
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
## Not recommended
# deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse
# deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse
# 中科大源(Ubuntu 20.04)
deb https://mirrors.ustc.edu.cn/ubuntu/ focal main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ focal main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ focal-security main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ focal-security main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ focal-updates main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ focal-updates main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ focal-backports main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ focal-backports main restricted universe multiverse
## Not recommended
# deb https://mirrors.ustc.edu.cn/ubuntu/ focal-proposed main restricted universe multiverse
# deb-src https://mirrors.ustc.edu.cn/ubuntu/ focal-proposed main restricted universe multiverse
或(寻找属于自己的发行版):
https://mirrors.ustc.edu.cn/repogen/
sudo apt update
anaconda镜像源(~/.condarc):
channels:
- defaults
show_channel_urls: true
default_channels:
- https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main
- https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/r
- https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/msys2
custom_channels:
conda-forge: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
msys2: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
bioconda: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
menpo: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
pytorch: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
pytorch-lts: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
simpleitk: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
deepmodeling: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
nvidia: https://mirrors.cernet.edu.cn/anaconda-extra/cloud
envs_dirs:
- /home/m0rtzz/Program_Files/anaconda3/envs
3.设置$HOME下文件夹为英文
export LANG=en_US
xdg-user-dirs-gtk-update
编辑选择右边的Update Names
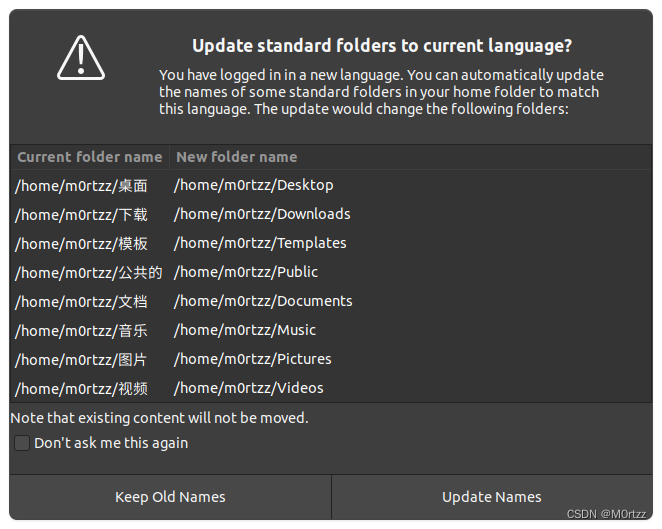
之后执行以下语句:
export LANG=zh_CN
reboot
勾选不要再次询问我,并选择保留旧的名称

4.禁用Nouveau驱动
sudo gedit /etc/modprobe.d/blacklist.conf
输入
blacklist nouveau
options nouveau modeset=0
保存后关闭,打开终端,输入:
sudo update-initramfs -u
reboot
5.安装Nvidia驱动(有可能会损坏系统,如果损坏可以重装并看看网上的其他教程,除了这种安装方法还有其他安装方法,自行上网了解)
打开终端,输入:
sudo apt install gcc g++ make zlib1g
sudo ubuntu-drivers devices
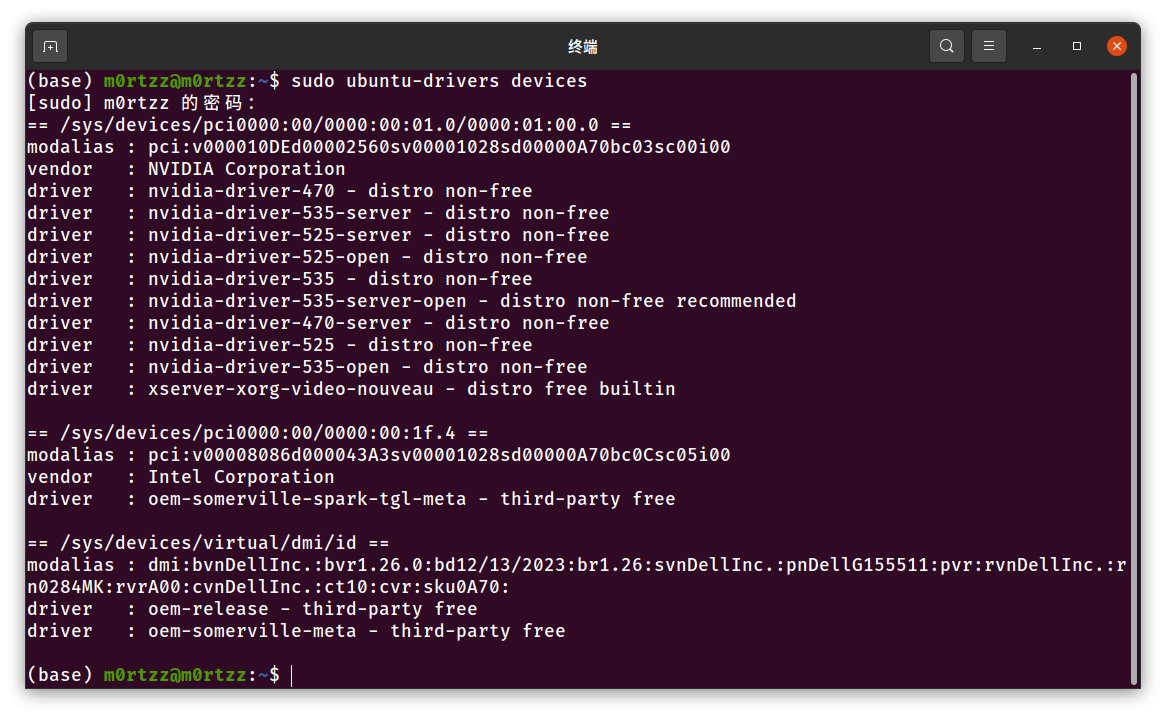
最好寻找带有recommended的版本,输入
sudo apt install nvidia-driver-your_version nvidia-settings nvidia-prime
(your_version是你的版本号)
sudo apt update
sudo apt upgrade
reboot
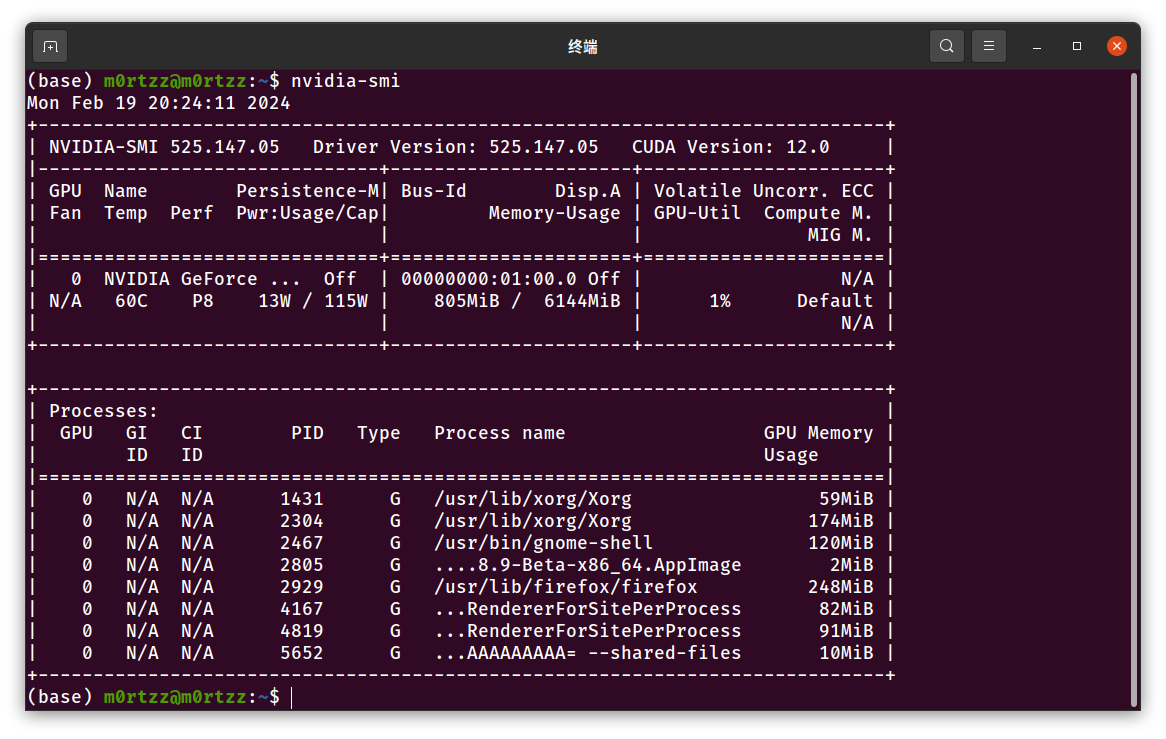
验证版本
nvidia-smi
6.cuda安装:
https://developer.nvidia.com/cuda-toolkit-archive
选择和上一步nvidia-smi显示的cuda版本对应的进行安装,官方有教程
安装好之后打开终端输入
gedit ~/.bashrc
在最后输入
# cuda
export LD_LIBRARY_PATH=${LD_LIBRARY_PATH}:/usr/local/cuda/lib64
export PATH=${PATH}:/usr/local/cuda/bin
export CUDA_HOME=/usr/local/cuda #cuda的软连接库,可以设置多版本共存指向
保存后关闭,打开终端,输入:
source ~/.bashrc
接下来验证cuda版本:
nvcc --version
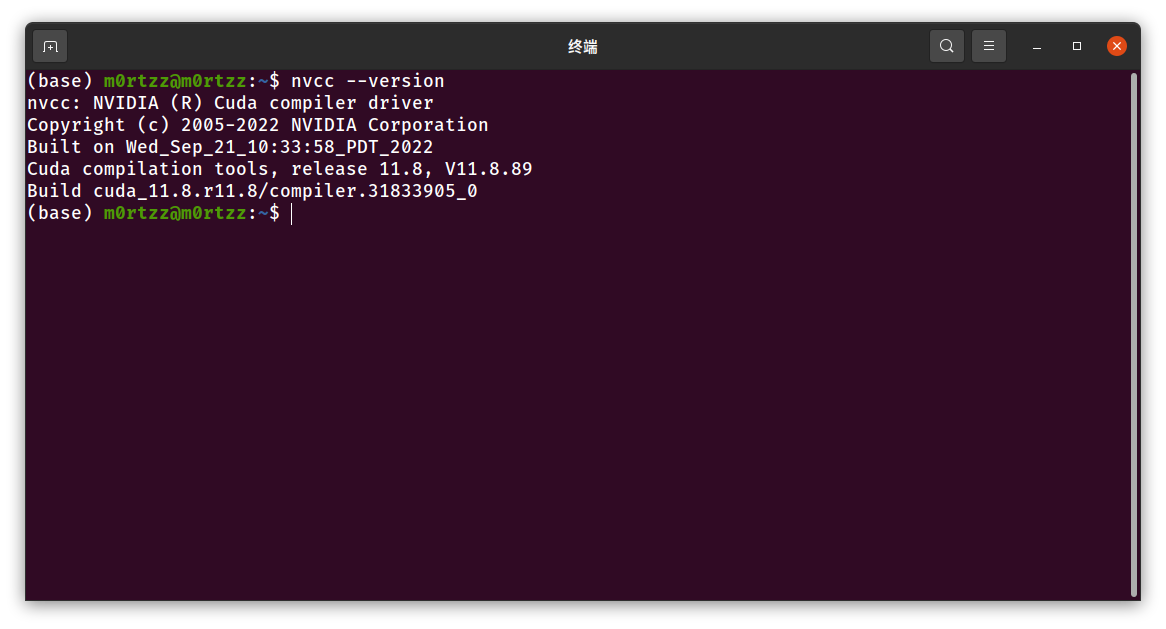
安装成功!
7.cudnn安装:
https://developer.nvidia.com/rdp/cudnn-archive
官方安装教程(选择合适版本的NVIDIA cuDNN Installation Guide):
https://docs.nvidia.com/deeplearning/cudnn/archives/index.html
tar -xvf cudnn-linux-x86_64-8.x.x.x_cudaX.Y-archive.tar.xz
sudo cp cudnn-*-archive/include/cudnn*.h /usr/local/cuda/include
sudo cp -P cudnn-*-archive/lib/libcudnn* /usr/local/cuda/lib64
sudo chmod a+r /usr/local/cuda/include/cudnn*.h /usr/local/cuda/lib64/libcudnn*
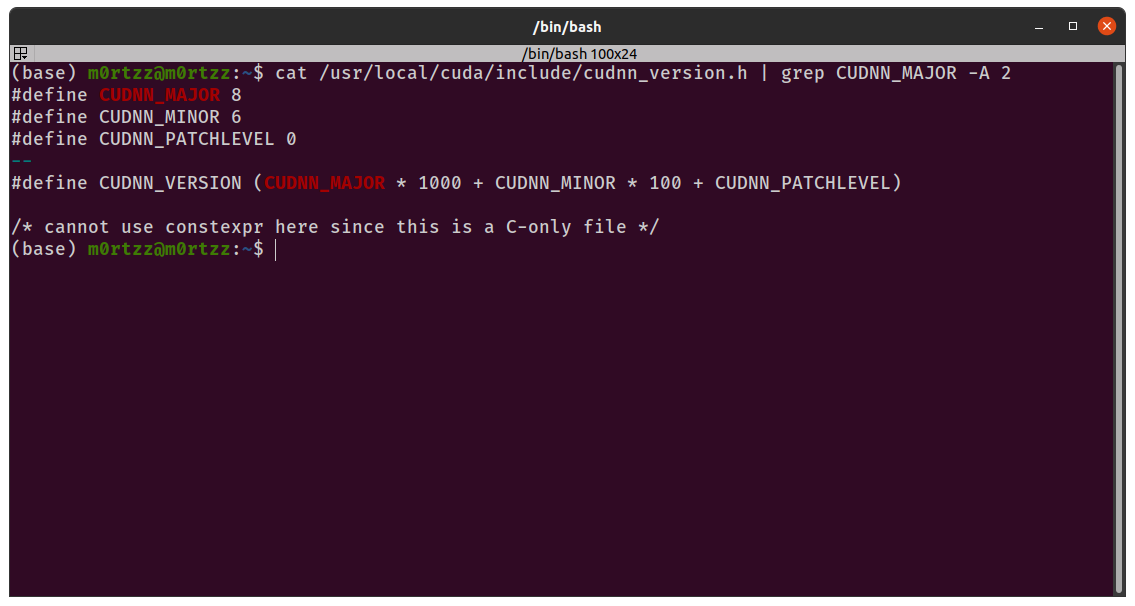
验证是否安装成功
cat /usr/local/cuda/include/cudnn_version.h | grep CUDNN_MAJOR -A 2
8.安装ROS(有些图忘记截了)
①ROS-melodic
导入Key
sudo gpg --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo gpg --export C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 | sudo tee /usr/share/keyrings/ros.gpg > /dev/null
设置中科大源
sudo sh -c 'echo "deb [signed-by=/usr/share/keyrings/ros.gpg] https://mirrors.ustc.edu.cn/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt update
sudo apt install ros-melodic-desktop-full
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
sudo apt install python3-pip
使用阿里镜像源加速pip下载:
sudo pip3 install rosdepc -i https://mirrors.aliyun.com/pypi/simple/
sudo rosdepc init
rosdepc update
sudo chmod 777 -R ~/.ros/
roscore
②ROS-noetic
导入Key
sudo gpg --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo gpg --export C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 | sudo tee /usr/share/keyrings/ros.gpg > /dev/null
设置中科大源
sudo sh -c 'echo "deb [signed-by=/usr/share/keyrings/ros.gpg] https://mirrors.ustc.edu.cn/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt update && sudo apt install ros-noetic-desktop-full
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
sudo apt install python3-pip
使用阿里镜像源加速pip下载:
sudo pip3 install rosdepc -i https://mirrors.aliyun.com/pypi/simple/
sudo rosdepc init
rosdepc update
sudo chmod 777 -R ~/.ros/
roscore
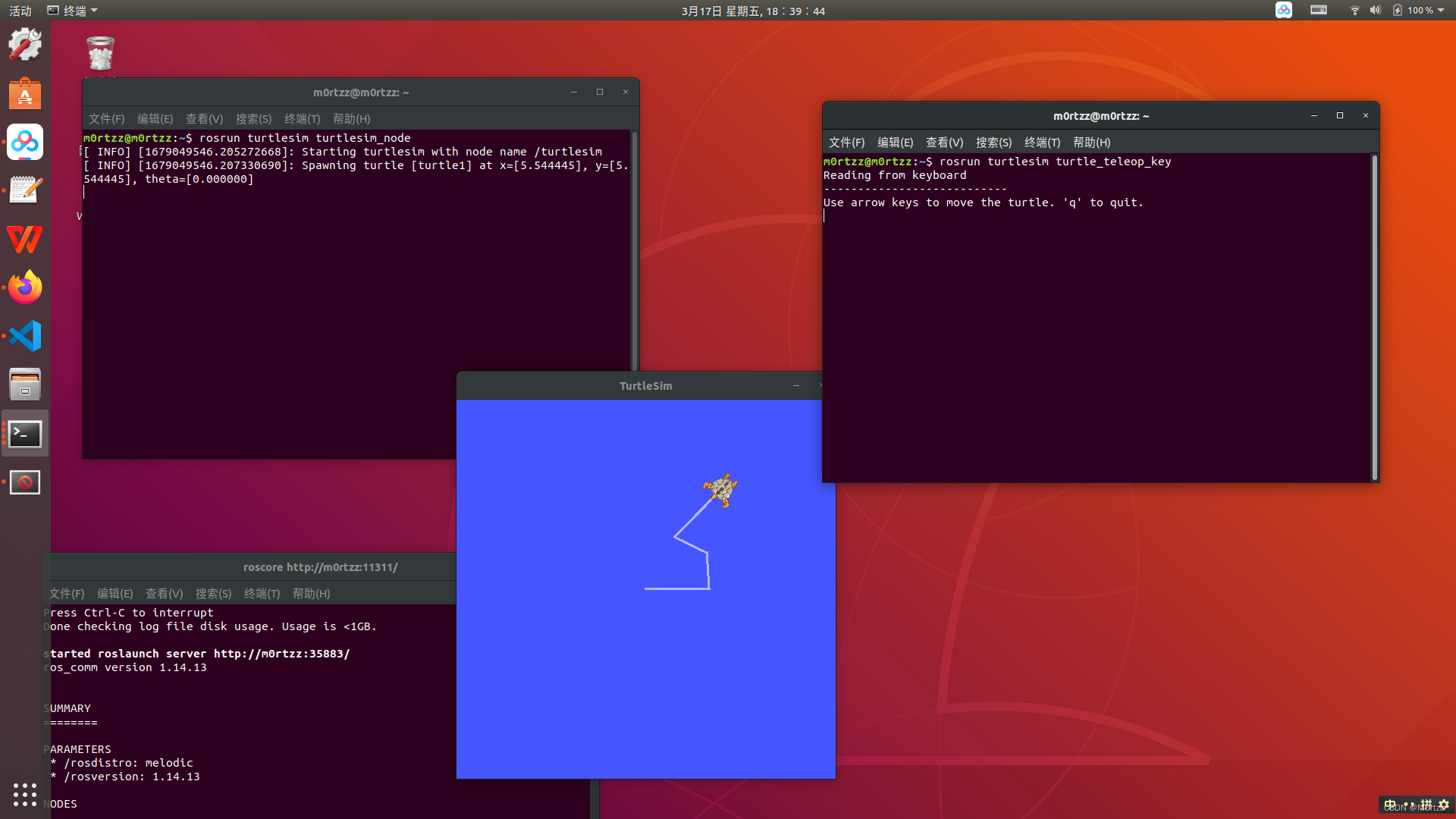
再新建两个终端,分别输入
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
在rosrun turtlesim turtle_teleop_key所在终端点击一下任意位置,然后使用↕↔小键盘控制,看小海龟会不会动,如果会动则安装成功
9.安装opencv-3.4.16和opencv_contrib-3.4.16(Ubuntu18.04),Ubuntu20.04请装opencv-4.2.0及其扩展模块:
虽然使用cv_bridge时某些shared object有可能和ROS自带的opencv-3.2.0版本冲突,但实测安装3.2.0对cuda的兼容性太差导致无法使用深度相机,所以安装官网最近更新过的OpenCV3.4.16
经尝试多版本Ubuntu和OpenCV,装Ubuntu20.04,ROS noetic和OpenCV4.2.0及其扩展模块才能解决将彩色图像转换为网络所需的输入Blob后前馈时抛出的(raised OpenCV exception,error: (-215:Assertion failed)等等)。下方OpenCV3的安装步骤仅供参考,OpenCV4.2.0的cmake命令及注意事项在本小节最后!
①OpenCV3的安装步骤:
git clone -b 3.4.16 https://gitcode.com/mirrors/opencv/opencv.git opencv-3.4.16
cd opencv-3.4.16
git clone -b 3.4.16 https://gitcode.com/mirrors/opencv/opencv_contrib.git opencv_contrib-3.4.16
安装所需依赖库,打开终端,输入:
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main"
sudo apt update
sudo apt install libjasper1 libjasper-dev
sudo apt install build-essential cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libdc1394-22-dev liblapacke-dev checkinstall
sudo apt install liblapacke-dev checkinstall
进入opencv-3.4.16文件夹,打开终端,输入:
mkdir build
cd build
接下来编译安装,注意此命令的OPENCV_EXTRA_MODULES_PATH=后边的路径是你电脑下的绝对路径,请自行修改
cmake -D CMAKE_BUILD_TYPE=RELEASE \
-D WITH_GTK_2_X=ON \
-D OPENCV_ENABLE_NONFREE=ON \
-D OPENCV_GENERATE_PKGCONFIG=YES \
-D OPENCV_EXTRA_MODULES_PATH=/home/m0rtzz/Program_Files/opencv-3.4.16/opencv_contrib-3.4.16/modules \
-D WITH_CUDA=ON \
-D WITH_CUDNN=ON \
-D WITH_FFMPEG=ON \
-D WITH_OPENGL=ON \
-D WITH_NVCUVID=ON \
-D ENABLE_PRECOMPILED_HEADERS=OFF \
-D CMAKE_EXE_LINKER_FLAGS=-lcblas \
-D WITH_LAPACK=OFF \
-j$(nproc) ..
过程中会出现IPPICV: Download: ippicv_2020_lnx_intel64_20191018_general.tgz
解决方法:
cd ../ && mkdir downloads
cd downloads && pwd
复制绝对路径后:
打开这个ippicv.cmake

把绝对路径复制进去:
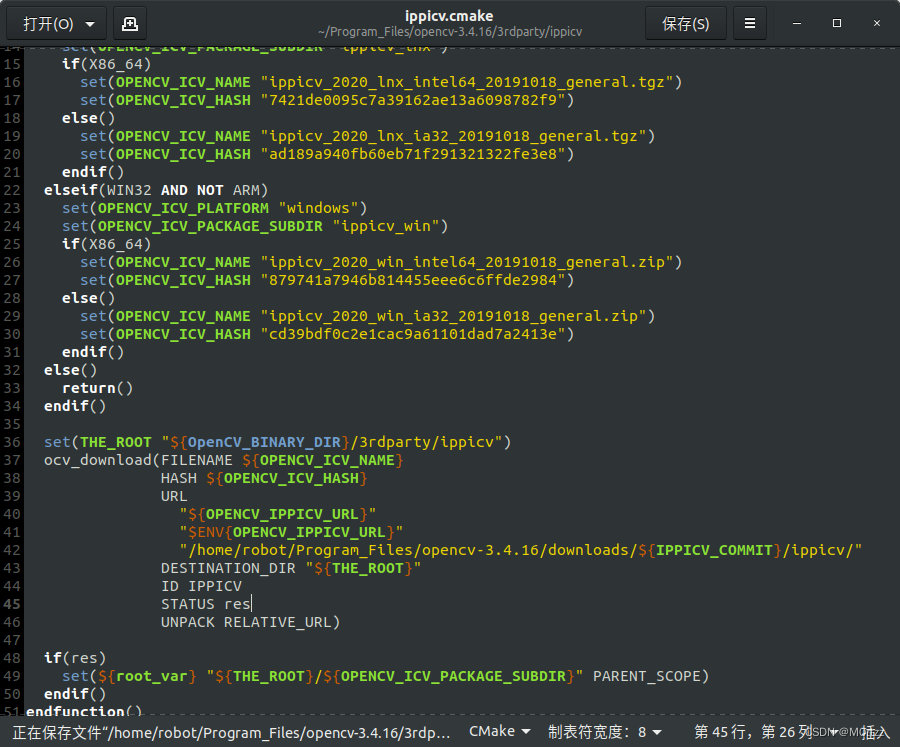
然后把下面网址下载的文件cp进去就行了(或者开头百度云分享链接中自取~)
https://gitcode.com/mirrors/opencv/opencv_3rdparty
然后重新打开终端,输入:cmake(别忘了改路径):
cmake -D CMAKE_BUILD_TYPE=RELEASE \
-D WITH_GTK_2_X=ON \
-D OPENCV_ENABLE_NONFREE=ON \
-D OPENCV_GENERATE_PKGCONFIG=YES \
-D OPENCV_EXTRA_MODULES_PATH=/home/m0rtzz/Program_Files/opencv-3.4.16/opencv_contrib-3.4.16/modules \
-D WITH_CUDA=ON \
-D WITH_CUDNN=ON \
-D WITH_FFMPEG=ON \
-D WITH_OPENGL=ON \
-D WITH_NVCUVID=ON \
-D ENABLE_PRECOMPILED_HEADERS=OFF \
-D CMAKE_EXE_LINKER_FLAGS=-lcblas \
-D WITH_LAPACK=OFF \
-j$(nproc) ..
这些.i文件需要在国外下载,网上说下载好文件直接把他们放进相对应的目录下就行,实测不行(建议科学的上网,想试试网上说法的:
https://blog.csdn.net/curious_undergather/article/details/111639199
文件的话,开头百度云分享链接里都有)
cmake -D CMAKE_BUILD_TYPE=RELEASE \
-D WITH_GTK_2_X=ON \
-D OPENCV_ENABLE_NONFREE=ON \
-D OPENCV_GENERATE_PKGCONFIG=YES \
-D OPENCV_EXTRA_MODULES_PATH=/home/m0rtzz/Program_Files/opencv-3.4.16/opencv_contrib-3.4.16/modules \
-D WITH_CUDA=ON \
-D WITH_CUDNN=ON \
-D WITH_FFMPEG=ON \
-D WITH_OPENGL=ON \
-D WITH_NVCUVID=ON \
-D ENABLE_PRECOMPILED_HEADERS=OFF \
-D CMAKE_EXE_LINKER_FLAGS=-lcblas \
-D WITH_LAPACK=OFF \
-j$(nproc) ..
sudo make -j$(nproc)
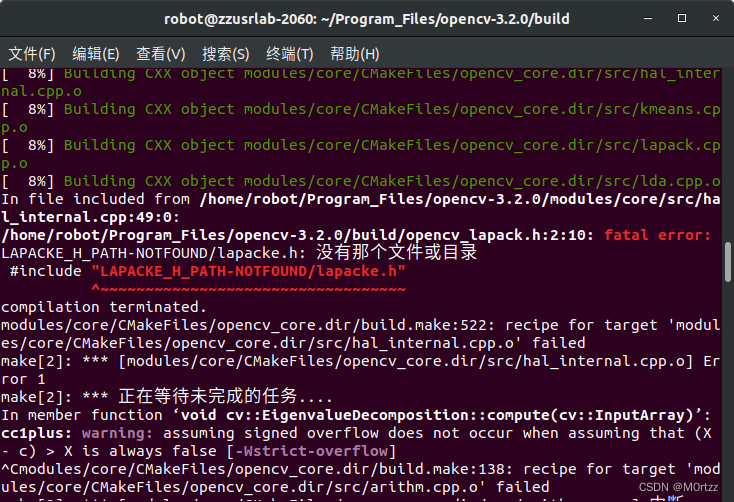
打开那个头文件,把报错所在行改为:
#include "lapacke.h"
sudo make -j$(nproc)
sudo make install
sudo gedit /etc/ld.so.conf.d/opencv.conf
加入
/usr/local/lib
保存后关闭,打开终端,输入:
sudo ldconfig
sudo gedit /etc/bash.bashrc
加入
export PKG_CONFIG_PATH=${PKG_CONFIG_PATH}:/usr/local/lib/pkgconfig
保存后关闭,打开终端,输入:
source /etc/bash.bashrc
测试
cd ../samples/cpp/example_cmake
cmake -j$(nproc) .
sudo make -j$(nproc)
./opencv_example
安装成功!
设置cv_bridge的版本(ROS-melodic,经实践发现毫无效果):
sudo gedit /opt/ros/melodic/share/cv_bridge/cmake/cv_bridgeConfig.cmake
# generated from catkin/cmake/template/pkgConfig.cmake.in
# append elements to a list and remove existing duplicates from the list
# copied from catkin/cmake/list_append_deduplicate.cmake to keep pkgConfig
# self contained
macro(_list_append_deduplicate listname)
if(NOT "${ARGN}" STREQUAL "")
if(${listname})
list(REMOVE_ITEM ${listname} ${ARGN})
endif()
list(APPEND ${listname} ${ARGN})
endif()
endmacro()
# append elements to a list if they are not already in the list
# copied from catkin/cmake/list_append_unique.cmake to keep pkgConfig
# self contained
macro(_list_append_unique listname)
foreach(_item ${ARGN})
list(FIND ${listname} ${_item} _index)
if(_index EQUAL -1)
list(APPEND ${listname} ${_item})
endif()
endforeach()
endmacro()
# pack a list of libraries with optional build configuration keywords
# copied from catkin/cmake/catkin_libraries.cmake to keep pkgConfig
# self contained
macro(_pack_libraries_with_build_configuration VAR)
set(${VAR} "")
set(_argn ${ARGN})
list(LENGTH _argn _count)
set(_index 0)
while(${_index} LESS ${_count})
list(GET _argn ${_index} lib)
if("${lib}" MATCHES "^(debug|optimized|general)$")
math(EXPR _index "${_index} + 1")
if(${_index} EQUAL ${_count})
message(FATAL_ERROR "_pack_libraries_with_build_configuration() the list of libraries '${ARGN}' ends with '${lib}' which is a build configuration keyword and must be followed by a library")
endif()
list(GET _argn ${_index} library)
list(APPEND ${VAR} "${lib}${CATKIN_BUILD_CONFIGURATION_KEYWORD_SEPARATOR}${library}")
else()
list(APPEND ${VAR} "${lib}")
endif()
math(EXPR _index "${_index} + 1")
endwhile()
endmacro()
# unpack a list of libraries with optional build configuration keyword prefixes
# copied from catkin/cmake/catkin_libraries.cmake to keep pkgConfig
# self contained
macro(_unpack_libraries_with_build_configuration VAR)
set(${VAR} "")
foreach(lib ${ARGN})
string(REGEX REPLACE "^(debug|optimized|general)${CATKIN_BUILD_CONFIGURATION_KEYWORD_SEPARATOR}(.+)$" "\\1;\\2" lib "${lib}")
list(APPEND ${VAR} "${lib}")
endforeach()
endmacro()
if(cv_bridge_CONFIG_INCLUDED)
return()
endif()
set(cv_bridge_CONFIG_INCLUDED TRUE)
# set variables for source/devel/install prefixes
if("FALSE" STREQUAL "TRUE")
set(cv_bridge_SOURCE_PREFIX /tmp/binarydeb/ros-melodic-cv-bridge-1.13.1)
set(cv_bridge_DEVEL_PREFIX /tmp/binarydeb/ros-melodic-cv-bridge-1.13.1/.obj-x86_64-linux-gnu/devel)
set(cv_bridge_INSTALL_PREFIX "")
set(cv_bridge_PREFIX ${cv_bridge_DEVEL_PREFIX})
else()
set(cv_bridge_SOURCE_PREFIX "")
set(cv_bridge_DEVEL_PREFIX "")
set(cv_bridge_INSTALL_PREFIX /opt/ros/melodic)
set(cv_bridge_PREFIX ${cv_bridge_INSTALL_PREFIX})
endif()
# warn when using a deprecated package
if(NOT "" STREQUAL "")
set(_msg "WARNING: package 'cv_bridge' is deprecated")
# append custom deprecation text if available
if(NOT "" STREQUAL "TRUE")
set(_msg "${_msg} ()")
endif()
message("${_msg}")
endif()
# flag project as catkin-based to distinguish if a find_package()-ed project is a catkin project
set(cv_bridge_FOUND_CATKIN_PROJECT TRUE)
# if(NOT "include;/usr/include;/usr/include/opencv " STREQUAL " ")
# set(cv_bridge_INCLUDE_DIRS "")
# set(_include_dirs "include;/usr/include;/usr/include/opencv")
if(NOT "include;/usr/local/include/opencv;/usr/local/include/opencv2 " STREQUAL " ")
set(cv_bridge_INCLUDE_DIRS "")
set(_include_dirs "include;/usr/local/include/opencv;/usr/local/include/opencv;/usr/local/include/;/usr/include")
if(NOT "https://github.com/ros-perception/vision_opencv/issues " STREQUAL " ")
set(_report "Check the issue tracker 'https://github.com/ros-perception/vision_opencv/issues' and consider creating a ticket if the problem has not been reported yet.")
elseif(NOT "http://www.ros.org/wiki/cv_bridge " STREQUAL " ")
set(_report "Check the website 'http://www.ros.org/wiki/cv_bridge' for information and consider reporting the problem.")
else()
set(_report "Report the problem to the maintainer 'Vincent Rabaud <vincent.rabaud@gmail.com>' and request to fix the problem.")
endif()
foreach(idir ${_include_dirs})
if(IS_ABSOLUTE ${idir} AND IS_DIRECTORY ${idir})
set(include ${idir})
elseif("${idir} " STREQUAL "include ")
get_filename_component(include "${cv_bridge_DIR}/../../../include" ABSOLUTE)
if(NOT IS_DIRECTORY ${include})
message(FATAL_ERROR "Project 'cv_bridge' specifies '${idir}' as an include dir, which is not found. It does not exist in '${include}'. ${_report}")
endif()
else()
message(FATAL_ERROR "Project 'cv_bridge' specifies '${idir}' as an include dir, which is not found. It does neither exist as an absolute directory nor in '\${prefix}/${idir}'. ${_report}")
endif()
_list_append_unique(cv_bridge_INCLUDE_DIRS ${include})
endforeach()
endif()
# set(libraries "cv_bridge;/usr/lib/x86_64-linux-gnu/libopencv_core.so.3.2.0;/usr/lib/x86_64-linux-gnu/libopencv_imgproc.so.3.2.0;/usr/lib/x86_64-linux-gnu/libopencv_imgcodecs.so.3.2.0")
set(libraries "cv_bridge;/usr/local/lib/libopencv_core.so.3.4.16;/usr/local/lib/libopencv_imgproc.so.3.4.16;/usr/local/lib/libopencv_imgcodecs.so.3.4.16")
foreach(library ${libraries})
# keep build configuration keywords, target names and absolute libraries as-is
if("${library}" MATCHES "^(debug|optimized|general)$")
list(APPEND cv_bridge_LIBRARIES ${library})
elseif(${library} MATCHES "^-l")
list(APPEND cv_bridge_LIBRARIES ${library})
elseif(${library} MATCHES "^-")
# This is a linker flag/option (like -pthread)
# There's no standard variable for these, so create an interface library to hold it
if(NOT cv_bridge_NUM_DUMMY_TARGETS)
set(cv_bridge_NUM_DUMMY_TARGETS 0)
endif()
# Make sure the target name is unique
set(interface_target_name "catkin::cv_bridge::wrapped-linker-option${cv_bridge_NUM_DUMMY_TARGETS}")
while(TARGET "${interface_target_name}")
math(EXPR cv_bridge_NUM_DUMMY_TARGETS "${cv_bridge_NUM_DUMMY_TARGETS}+1")
set(interface_target_name "catkin::cv_bridge::wrapped-linker-option${cv_bridge_NUM_DUMMY_TARGETS}")
endwhile()
add_library("${interface_target_name}" INTERFACE IMPORTED)
if("${CMAKE_VERSION}" VERSION_LESS "3.13.0")
set_property(
TARGET
"${interface_target_name}"
APPEND PROPERTY
INTERFACE_LINK_LIBRARIES "${library}")
else()
target_link_options("${interface_target_name}" INTERFACE "${library}")
endif()
list(APPEND cv_bridge_LIBRARIES "${interface_target_name}")
elseif(TARGET ${library})
list(APPEND cv_bridge_LIBRARIES ${library})
elseif(IS_ABSOLUTE ${library})
list(APPEND cv_bridge_LIBRARIES ${library})
else()
set(lib_path "")
set(lib "${library}-NOTFOUND")
# since the path where the library is found is returned we have to iterate over the paths manually
foreach(path /opt/ros/melodic/lib;/opt/ros/melodic/lib)
find_library(lib ${library}
PATHS ${path}
NO_DEFAULT_PATH NO_CMAKE_FIND_ROOT_PATH)
if(lib)
set(lib_path ${path})
break()
endif()
endforeach()
if(lib)
_list_append_unique(cv_bridge_LIBRARY_DIRS ${lib_path})
list(APPEND cv_bridge_LIBRARIES ${lib})
else()
# as a fall back for non-catkin libraries try to search globally
find_library(lib ${library})
if(NOT lib)
message(FATAL_ERROR "Project '${PROJECT_NAME}' tried to find library '${library}'. The library is neither a target nor built/installed properly. Did you compile project 'cv_bridge'? Did you find_package() it before the subdirectory containing its code is included?")
endif()
list(APPEND cv_bridge_LIBRARIES ${lib})
endif()
endif()
endforeach()
set(cv_bridge_EXPORTED_TARGETS "")
# create dummy targets for exported code generation targets to make life of users easier
foreach(t ${cv_bridge_EXPORTED_TARGETS})
if(NOT TARGET ${t})
add_custom_target(${t})
endif()
endforeach()
set(depends "rosconsole;sensor_msgs")
foreach(depend ${depends})
string(REPLACE " " ";" depend_list ${depend})
# the package name of the dependency must be kept in a unique variable so that it is not overwritten in recursive calls
list(GET depend_list 0 cv_bridge_dep)
list(LENGTH depend_list count)
if(${count} EQUAL 1)
# simple dependencies must only be find_package()-ed once
if(NOT ${cv_bridge_dep}_FOUND)
find_package(${cv_bridge_dep} REQUIRED NO_MODULE)
endif()
else()
# dependencies with components must be find_package()-ed again
list(REMOVE_AT depend_list 0)
find_package(${cv_bridge_dep} REQUIRED NO_MODULE ${depend_list})
endif()
_list_append_unique(cv_bridge_INCLUDE_DIRS ${${cv_bridge_dep}_INCLUDE_DIRS})
# merge build configuration keywords with library names to correctly deduplicate
_pack_libraries_with_build_configuration(cv_bridge_LIBRARIES ${cv_bridge_LIBRARIES})
_pack_libraries_with_build_configuration(_libraries ${${cv_bridge_dep}_LIBRARIES})
_list_append_deduplicate(cv_bridge_LIBRARIES ${_libraries})
# undo build configuration keyword merging after deduplication
_unpack_libraries_with_build_configuration(cv_bridge_LIBRARIES ${cv_bridge_LIBRARIES})
_list_append_unique(cv_bridge_LIBRARY_DIRS ${${cv_bridge_dep}_LIBRARY_DIRS})
list(APPEND cv_bridge_EXPORTED_TARGETS ${${cv_bridge_dep}_EXPORTED_TARGETS})
endforeach()
set(pkg_cfg_extras "cv_bridge-extras.cmake")
foreach(extra ${pkg_cfg_extras})
if(NOT IS_ABSOLUTE ${extra})
set(extra ${cv_bridge_DIR}/${extra})
endif()
include(${extra})
endforeach()
opencv-3.4.4cmake命令:
cmake -D CMAKE_BUILD_TYPE=BUILD \
-D CMAKE_INSTALL_PREFIX=/usr/local \
-D WITH_GTK_2_X=ON \
-D OPENCV_ENABLE_NONFREE=ON \
-D OPENCV_GENERATE_PKGCONFIG=YES \
-D OPENCV_EXTRA_MODULES_PATH=/home/m0rtzz/Program_Files/opencv-3.4.4/opencv_contrib-3.4.4/modules \
-D WITH_CUDA=ON \
-D WITH_CUDNN=ON \
-D OPENCV_DNN_CUDA=ON \
-D WITH_FFMPEG=ON \
-D WITH_OPENGL=ON \
-D WITH_NVCUVID=ON \
-D ENABLE_PRECOMPILED_HEADERS=OFF \
-D CMAKE_EXE_LINKER_FLAGS=-lcblas \
-D WITH_LAPACK=OFF \
-D WITH_OPENMP=ON \
-D BUILD_TESTS=OFF \
-D BUILD_opencv_xfeatures2d=ON \
-D CUDA_ARCH_BIN=8.6 \
-D CUDA_GENERATION=Auto \
-D CUDA_HOST_COMPILER:FILEPATH=/usr/bin/gcc-7 \
-j$(nproc) ..
②OpenCV4.2.0的cmake命令及注意事项(Ubuntu20.04装这个):
cmake -D CMAKE_BUILD_TYPE=RELEASE \
-D OPENCV_GENERATE_PKGCONFIG=ON \
-D INSTALL_PYTHON_EXAMPLES=ON \
-D INSTALL_C_EXAMPLES=ON \
-D OPENCV_EXTRA_MODULES_PATH=/home/m0rtzz/Program_Files/opencv-4.2.0/opencv_contrib-4.2.0/modules \
-D WITH_V4L=ON \
-D WITH_QT=ON \
-D WITH_GTK=ON \
-D WITH_VTK=ON \
-D WITH_OPENGL=ON \
-D WITH_OPENMP=ON \
-D BUILD_EXAMPLES=ON \
-D WITH_CUDA=ON \
-D WITH_CUDNN=ON \
-D OPENCV_DNN_CUDA=ON \
-D BUILD_TIFF=ON \
-D ENABLE_PRECOMPILED_HEADERS=OFF \
-D OPENCV_ENABLE_NONFREE=ON \
-D CUDA_GENERATION=Auto \
-D CUDA_CUDA_LIBRARY=/usr/local/cuda/lib64/stubs/libcuda.so \
-D CUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda \
-D CUDNN_LIBRARY=/usr/local/cuda/lib64/libcudnn.so \
-D WITH_ADE=OFF ..
或:
cmake -D CMAKE_BUILD_TYPE=RELEASE \
-D OPENCV_GENERATE_PKGCONFIG=ON \
-D INSTALL_PYTHON_EXAMPLES=ON \
-D INSTALL_C_EXAMPLES=ON \
-D OPENCV_EXTRA_MODULES_PATH=/home/m0rtzz/Program_Files/opencv-4.2.0/opencv_contrib-4.2.0/modules \
-D WITH_V4L=ON \
-D WITH_QT=ON \
-D WITH_GTK=ON \
-D WITH_VTK=ON \
-D WITH_OPENGL=ON \
-D WITH_OPENMP=ON \
-D BUILD_EXAMPLES=ON \
-D WITH_CUDA=ON \
-D WITH_CUDNN=ON \
-D OPENCV_DNN_CUDA=ON \
-D BUILD_TIFF=ON \
-D ENABLE_PRECOMPILED_HEADERS=OFF \
-D OPENCV_ENABLE_NONFREE=ON \
-D CUDA_GENERATION=Auto \
-D WITH_ADE=OFF \
-D CUDA_CUDA_LIBRARY=true \
-D CUDA_nppicom_LIBRARY=true \
-j$(nproc) ..
或:
cmake -D CMAKE_BUILD_TYPE=RELEASE \
-D OPENCV_GENERATE_PKGCONFIG=ON \
-D INSTALL_PYTHON_EXAMPLES=ON \
-D INSTALL_C_EXAMPLES=ON \
-D OPENCV_EXTRA_MODULES_PATH=/home/m0rtzz/Program_Files/opencv-4.2.0/opencv_contrib-4.2.0/modules \
-D WITH_V4L=ON \
-D WITH_QT=ON \
-D WITH_GTK=ON \
-D WITH_VTK=OFF \
-D WITH_OPENGL=ON \
-D WITH_OPENMP=ON \
-D BUILD_EXAMPLES=ON \
-D WITH_CUDA=ON \
-D WITH_CUDNN=ON \
-D OPENCV_DNN_CUDA=ON \
-D BUILD_TIFF=ON \
-D ENABLE_PRECOMPILED_HEADERS=OFF \
-D OPENCV_ENABLE_NONFREE=ON \
-D CUDA_GENERATION=Auto \
-D WITH_ADE=OFF \
-D CUDA_CUDA_LIBRARY=true \
-D CUDNN_LIBRARY=/usr/local/cuda/lib64/libcudnn.so \
-D CUDA_ARCH_BIN= 8.6\
-D CUDA_nppicom_LIBRARY=stdc++ \
-D CUDA_HOST_COMPILER:FILEPATH=/usr/bin/gcc \
-j$(nproc) ..
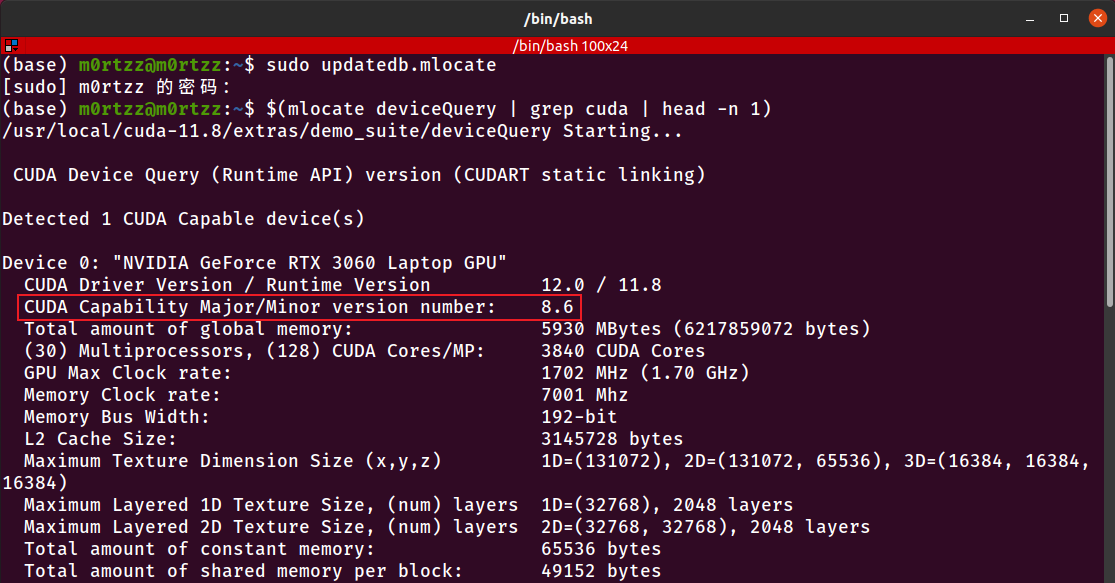
CUDA_ARCH_BIN查看命令:
sudo apt install mlocate
sudo updatedb.mlocate
$(mlocate deviceQuery | grep cuda | head -n 1)
+(解决CUDNN8编译报错,需手动加入PR代码)
https://github.com/opencv/opencv/pull/17685/files
.patch文件可用以下命令下载:
wget https://raw.gitcode.com/M0rtzz/opencv4-cudnn8-support-patch/assets/149 -O opencv_PR_17685.patch
+(如果不执行以下几步,编译darknet_ros会报错:error:‘IplImage’之类的)
sudo cp /usr/local/lib/pkgconfig/opencv4.pc /usr/lib/pkgconfig
cd /usr/lib/pkgconfig
sudo cp opencv4.pc opencv.pc
10.安装protobuf2.6.1
sudo apt install libtool
https://github.com/google/protobuf/releases/download/v2.6.1/protobuf-2.6.1.tar.gz
或镜像:
wget https://raw.gitcode.com/M0rtzz/protobuf-2.6.1/assets/199 -O protobuf-2.6.1.tar.gz
解压压缩包后进入文件夹,打开终端,输入:
./autogen.sh
./configure --prefix=/usr/local/protobuf
sudo make -j$(nproc)
养成make check的好习惯
sudo make check -j$(nproc)
sudo make install
sudo gedit /etc/profile
在最后加入:
#protobuf
export PATH=${PATH}:/usr/local/protobuf/bin/
export PKG_CONFIG_PATH=${PKG_CONFIG_PATH}:/usr/local/protobuf/lib/pkgconfig/
保存后关闭,打开终端,输入:
source /etc/profile
sudo gedit /etc/ld.so.conf
在最后一行输入:
/usr/local/protobuf/lib
保存后关闭,打开终端,输入:
sudo ldconfig
最后验证版本:
protoc --version
11.配置OpenBLAS
sudo apt install gcc-arm-linux-gnueabihf libnewlib-arm-none-eabi libc6-dev-i386
OpenBLAS源码(非最新)最上方百度网盘里有,或者使用公益加速源:
git clone https://gitclone.com/github.com/OpenMathLib/OpenBLAS.git OpenBLAS
cd OpenBLAS
sudo apt install gfortran
sudo make FC=gfortran TARGET=ARMV8 -j$(nproc)
sudo make PREFIX=/usr/local install
查看版本
grep OPENBLAS_VERSION /usr/local/include/openblas_config.h
12.配置seetaface2工作空间
gedit ~/.bashrc
在最后加入
source /home/m0rtzz/Workspaces/catkin_ws/devel/setup.bash
保存后关闭,打开终端,输入:
source ~/.bashrc
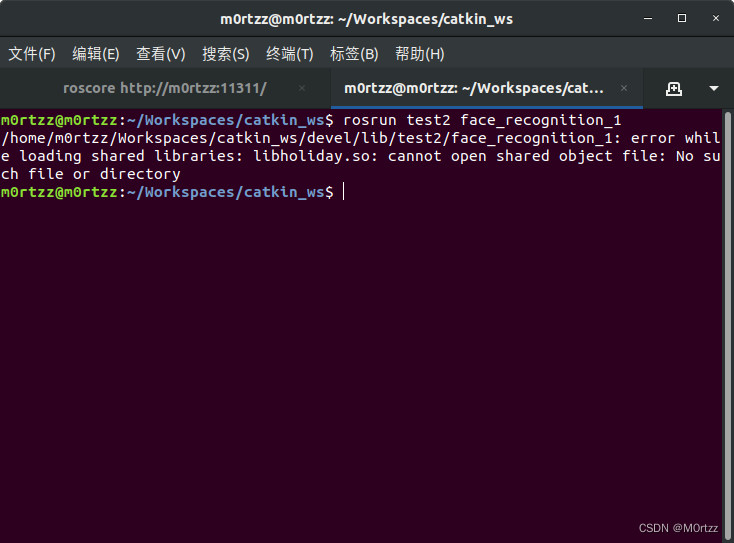
解决办法:
终端输入:
gedit ~/.bashrc
加入工作空间下lib文件夹的路径
export LD_LIBRARY_PATH=${LD_LIBRARY_PATH}:/home/m0rtzz/Workspaces/catkin_ws/lib
保存后关闭,打开终端,输入:
source ~/.bashrc
解决!
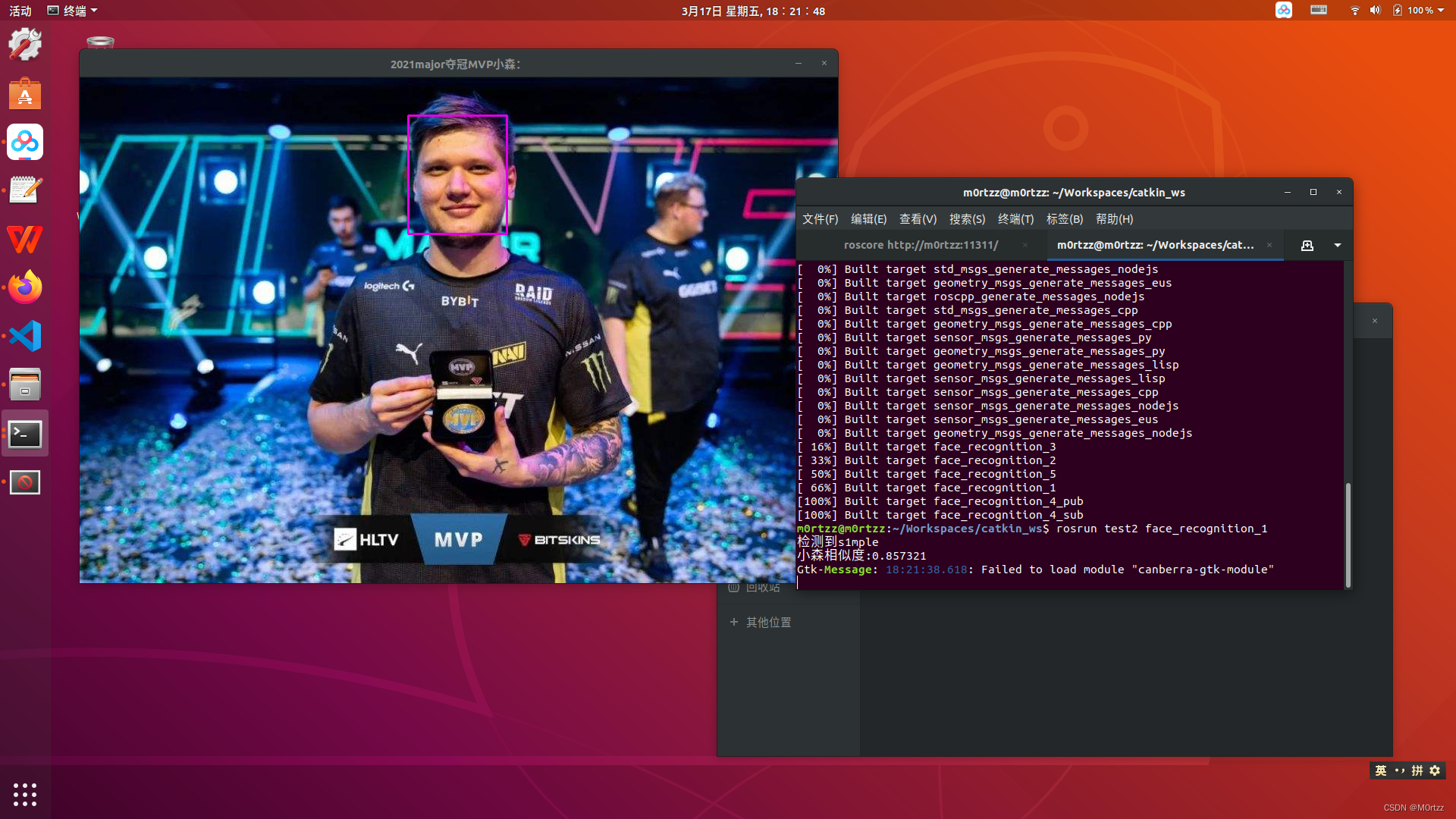
报错:
Gtk-Message: 15:22:30.610: Failed to load module "canberra-gtk-module"
解决方法:
sudo apt install libcanberra-gtk*
13.百度智能云
sudo apt install curl
include jsoncpp库的头文件改为
#include "jsoncpp/json/json.h"
g++编译
g++ *.cpp -o * -lcurl -ljsoncpp
运行
./*
14.使在桌面上右键打开终端时进入Desktop目录(Ubuntu18.04)
https://packages.ubuntu.com/source/bionic/gnome-terminal
下载下图表格中的下边两个文件

下载好gnome-terminal_3.28.1.orig.tar.xz文件之后解压出一个文件夹gnome-terminal-3.28.1,将gnome-terminal_3.28.1-1ubuntu1.debian.tar.xz 里面debian目录下的文件解压到之前解压出的gnome-terminal-3.28.1目录下
在此目录下打开终端
git apply patches/*.patch
安装依赖
sudo apt install intltool libvte-2.91-dev gsettings-desktop-schemas-dev uuid-dev libdconf-dev libpcre2-dev libgconf2-dev libxml2-utils gnome-shell libnautilus-extension-dev itstool yelp-tools pcre2-utils
打开src/下的terminal-nautilus.c
找到
static inline gboolean
desktop_opens_home_dir (TerminalNautilus *nautilus)
{
#if 0
return _client_get_bool (gconf_client,
"/apps/nautilus-open-terminal/desktop_opens_home_dir",
NULL);
#endif
return TRUE;
}
改为
static inline gboolean
desktop_opens_home_dir (TerminalNautilus *nautilus)
{
#if 0
return _client_get_bool (gconf_client,
"/apps/nautilus-open-terminal/desktop_opens_home_dir",
NULL);
#endif
return FALSE;
}
src下打开终端
cd ..
autoreconf --install
autoconf
./configure --prefix='/usr'
sudo make -j$(nproc)
sudo make check -j$(nproc)
sudo make install
sudo cp /usr/lib/nautilus/extensions-3.0/libterminal-nautilus.so /usr/lib/x86_64-linux-gnu/nautilus/extensions-3.0/
reboot
问题解决!
15.同步双系统时间
sudo apt install ntpdate
sudo ntpdate time.windows.com
timedatectl set-local-rtc 1 --adjust-system-clock
16.启动菜单的默认项
sudo gedit /etc/default/grub
改一下GRUB_DEFAULT=后边的数字,默认是0,windows是第n个就设置为 n-1
保存后关闭,打开终端,输入:
sudo update-grub
reboot
重启后问题解决~
17.安装darknet版yolov3及darknet-ros工作空间
git clone https://gitcode.com/mirrors/AlexeyAB/darknet.git darknet
cd darknet
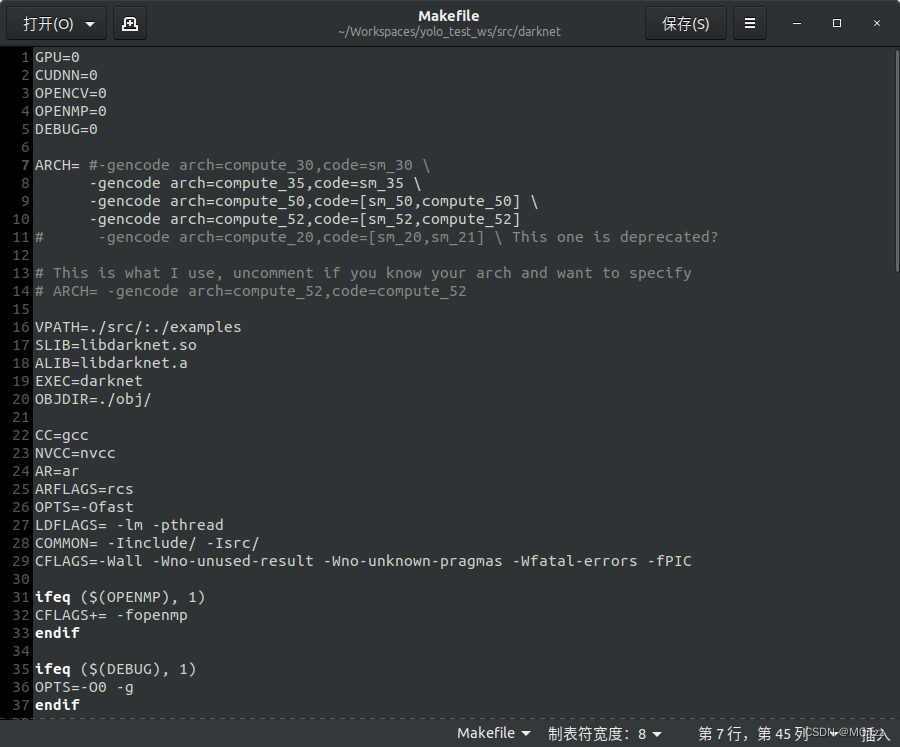
sudo gedit Makefile
修改以下前几行为:
GPU=1
CUDNN=1
CUDNN_HALF=1
OPENCV=1
AVX=0
OPENMP=1
LIBSO=1
ZED_CAMERA=0
ZED_CAMERA_v2_8=0
然后修改NVCC=后边为nvcc路径:
NVCC=/usr/local/cuda/bin/nvcc
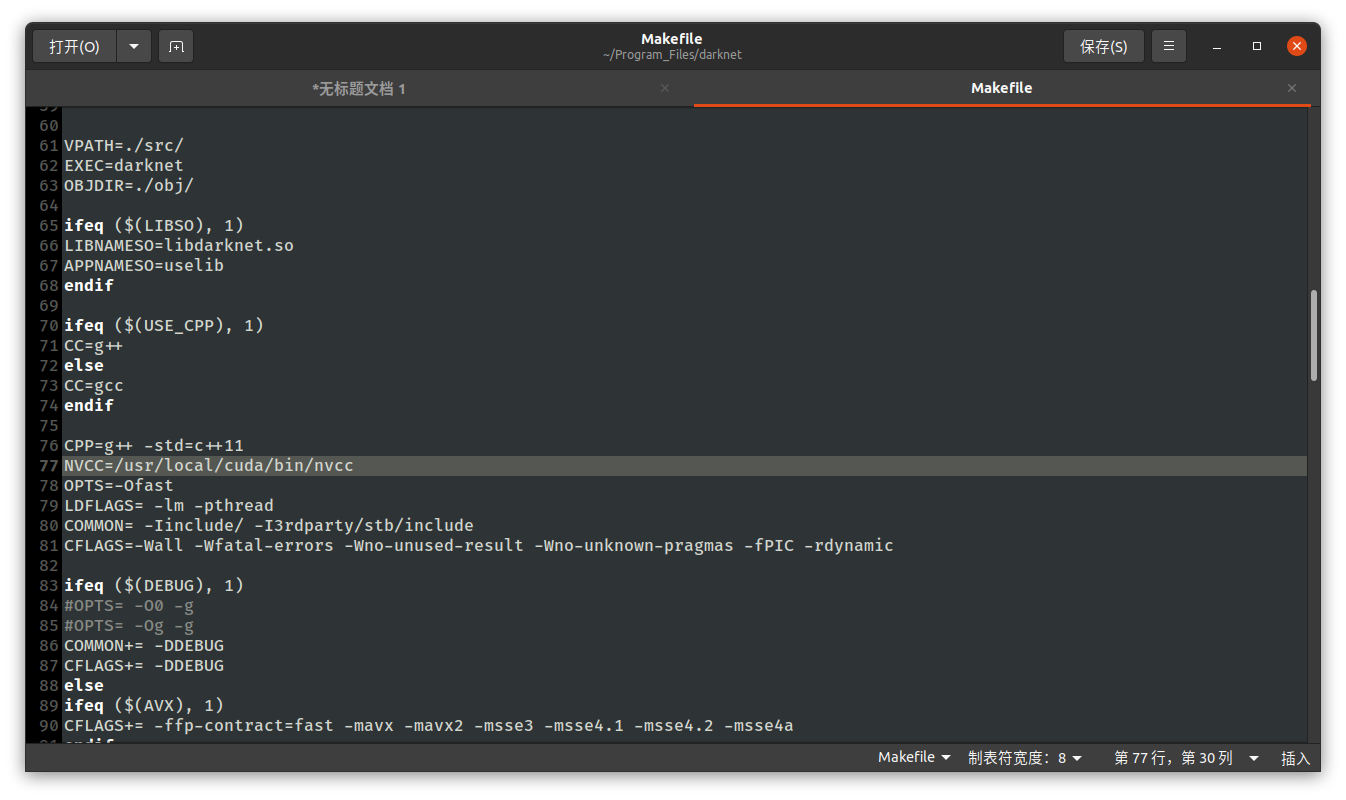
之后保存退出后,打开终端,输入:
sudo gedit /etc/ld.so.conf.d/cuda.conf
加入以下内容后保存退出:
/usr/local/cuda/lib64
打开终端输入:
sudo ldconfig
sudo make -j$(nproc)
./darknet
输出为:
usage: ./darknet <function>
之后我们下载yolov3权重文件:
mkdir weights && cd ./weights && wget https://pjreddie.com/media/files/yolov3.weights
正常wget太慢,我们使用mwget进行安装:
找一个你想安装mwget的地方打开终端,输入:
sudo apt install build-essential intltool
sudo apt upgrade intltool
sudo apt install libssl-dev
之后:
git clone https://github.com/rayylee/mwget.git mwget
或公益加速源:
git clone https://mirror.ghproxy.com/https://github.com/rayylee/mwget.git mwget
cd mwget
./configure
sudo make -j$(nproc)
sudo make install
之后mwget就安装成功了
我们用mwget多线程获取权重文件:
cd darknet/ && mkdir weights && cd weights/
mwget https://pjreddie.com/media/files/yolov3.weights -n16
上方命令是16线程获取 ,速度会快很多
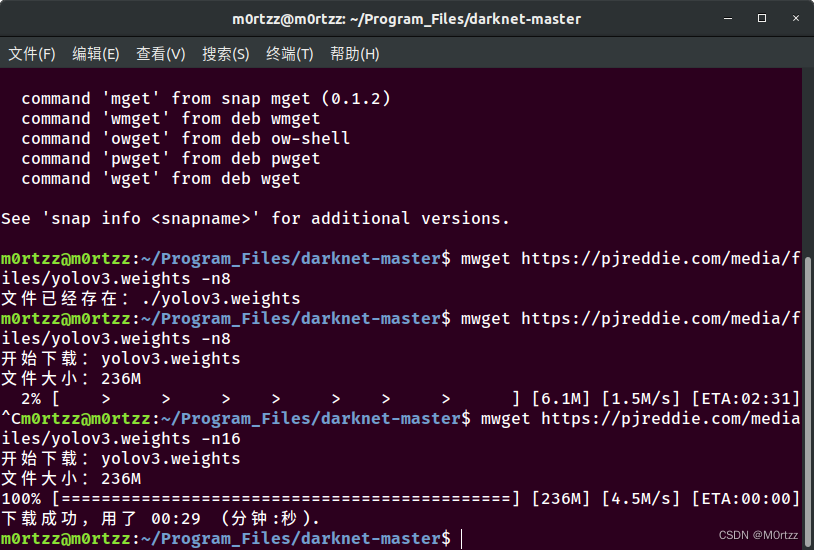
到此为止darknet版yolov3就配置好了
下面我们测试一下:
./darknet detect cfg/yolov3.cfg weights/yolov3.weights data/dog.jpg
输出以下就证明配置没有问题:
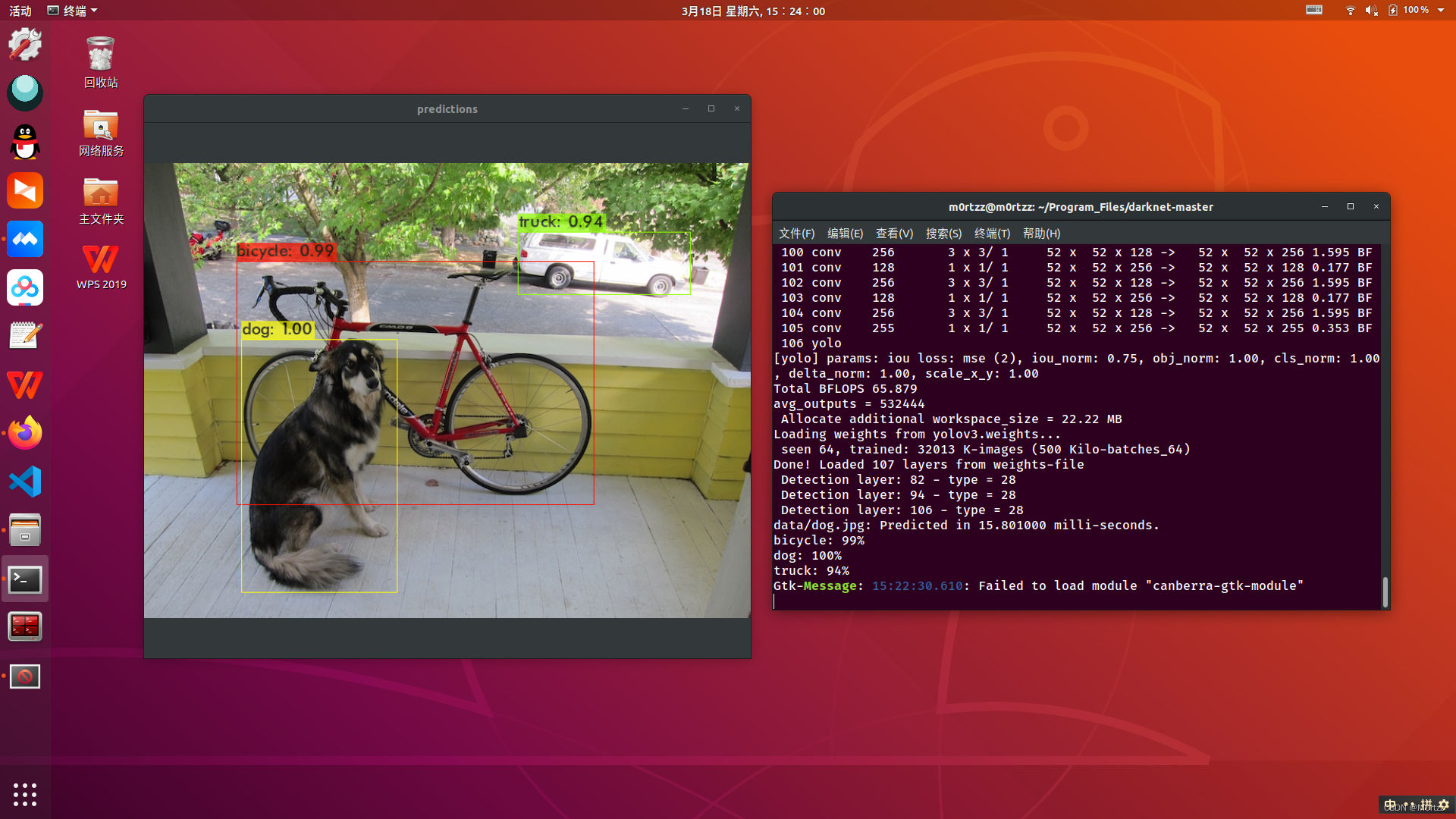
输出的最后一行报错:
Gtk-Message: 15:22:30.610: Failed to load module "canberra-gtk-module"
解决方法:
sudo apt install libcanberra-gtk*
安装之后重新运行就不会报错了。
配置 darknet-ros工作空间:
mkdir darknet-ros_test_ws && cd darknet-ros_test_ws/ && mkdir src
cd src/ && catkin_init_workspace
cd .. && catkin_make -j$(nproc)
cd src/
①如果是OpenCV3:
git clone --recursive https://gitcode.com/mirrors/leggedrobotics/darknet_ros.git darknet_ros
②如果是OpenCV4:
git clone -b opencv4 --recursive https://github.com/kunaltyagi/darknet_ros.git darknet_ros
cd darknet_ros
git branch -a
git checkout remotes/origin/opencv4
git submodule update --recursive
如果是OpenCV4,视频流只有第一帧是RGB8编码格式,阅读源码后发现在show_image之前调用image.cpp中的rgbgr_image函数循环转换图像编码格式即可解决此问题:
// @file : image.cpp
void rgbgr_image(image im)
{
int i;
for(i = 0; i < im.w*im.h; ++i){
float swap = im.data[i];
im.data[i] = im.data[i+im.w*im.h*2];
im.data[i+im.w*im.h*2] = swap;
}
}
// @file : YoloObjectDetector.cpp
void *YoloObjectDetector::displayInThread(void *ptr)
{
// NOTE: Modified by M0rtzz,Solved the problem of displaying video streams as bgr8
rgbgr_image(buff_[(buffIndex_ + 1) % 3]);
int c = show_image(buff_[(buffIndex_ + 1) % 3], "YOLO V3", waitKeyDelay_);
if (c != -1)
c = c % 256;
if (c == 27)
{
demoDone_ = 1;
return 0;
}
else if (c == 82)
{
demoThresh_ += .02;
}
else if (c == 84)
{
demoThresh_ -= .02;
if (demoThresh_ <= .02)
demoThresh_ = .02;
}
else if (c == 83)
{
demoHier_ += .02;
}
else if (c == 81)
{
demoHier_ -= .02;
if (demoHier_ <= .0)
demoHier_ = .0;
}
return 0;
}
之后:
cd darknet_ros && sudo rm -rf darknet
git clone https://gitcode.com/mirrors/AlexeyAB/darknet.git darknet
catkin_make如果编译不过的话(error: ‘IplImage’之类的,之前装OpenCV提到过避免报错的方法),注意以下命令是只编译darknet-ros一个包,若工作空间下有多个包需要一起编译那么把命令中的darknet-ros删除重新执行即可:
catkin_make -j$(nproc) darknet_ros --cmake-args -DCMAKE_CXX_FLAGS=-DCV__ENABLE_C_API_CTORS
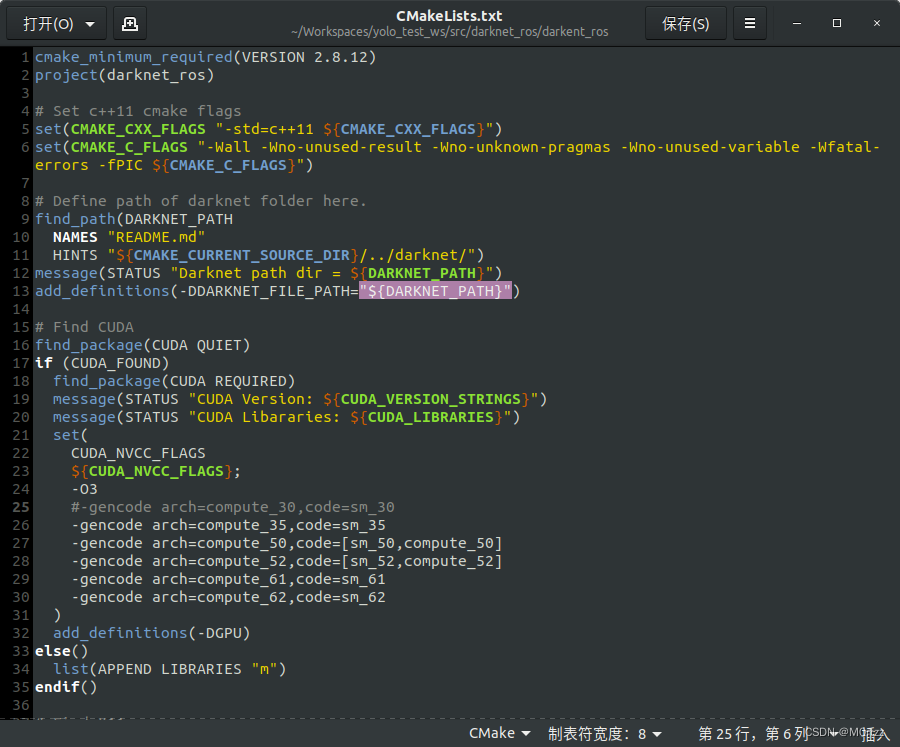
如果报错nvcc fatal : Unsupported gpu architecture 'compute_30’之类的,是因为CUDA11已经不支持compute_30了,我们将darknet_ros/darknet/Makefile和darknet_ros/darknet_ros/CMakeLists.txt中含有 'compute_30’的行进行注释后重新catkin_make:
18.Azure Kinect SDK-v1.4.0的安装(Ubuntu18.04源码编译安装,也可像本小节末尾Ubuntu20.04一样直接使用.deb包安装)
①Ubuntu18.04源码编译安装:
Reference:
https://blog.csdn.net/BlacKingZ/article/details/119115883
git clone -b v1.4.0 https://gitcode.com/mirrors/microsoft/Azure-Kinect-Sensor-SDK.git Azure-Kinect-Sensor-SDK-v1.4.0
sudo dpkg --add-architecture amd64
sudo apt update
sudo apt install -y pkg-config ninja-build doxygen clang gcc-multilib g++-multilib python3 nasm cmake libgl1-mesa-dev libsoundio-dev libvulkan-dev libx11-dev libxcursor-dev libxinerama-dev libxrandr-dev libusb-1.0-0-dev libssl-dev libudev-dev mesa-common-dev uuid-dev
https://packages.microsoft.com/ubuntu/18.04/prod/pool/main/libk/
从上面的网站下载 libk4a1.2 中 libk4a1.2_1.2.0_amd64.deb文件

解压 .deb 文件,再解压内部的 data.tar.gz和control.tar.gz文件,并进入data文件夹,打开终端输入:
cd usr/lib/x86_64-linux-gnu
sudo cp libdepthengine.so.2.0 /usr/lib/x86_64-linux-gnu
随后进入下载好的 Azure-Kinect-Sensor-SDK-v1.4.0文件夹下打开终端输入
mkdir build && cd build
cmake -j$(nproc) .. -GNinja
注意此步过程中extern/libyuv/src克隆较慢原因是使用了google的网站,我们把对应文件的克隆url改为github的就能正常克隆了,在Azure-Kinect-Sensor-SDK-v1.4.0文件夹下键盘Ctrl+H显示隐藏文件,打开.gitmodules文件,修改libyuv的部分为:
[submodule "extern/libyuv/src"]
path = extern/libyuv/src
url = https://github.com/lemenkov/libyuv.git
保存后关闭
之后打开.git文件夹下的config文件,修改libyuv的部分为:
[submodule "extern/libyuv/src"]
active = true
url = https://github.com/lemenkov/libyuv.git
接下来就能正常克隆了,但是速度还是很慢,请耐心等待~
保存后关闭,打开终端,输入:
cmake -j$(nproc) .. -GNinja
克隆完成后为如图所示:
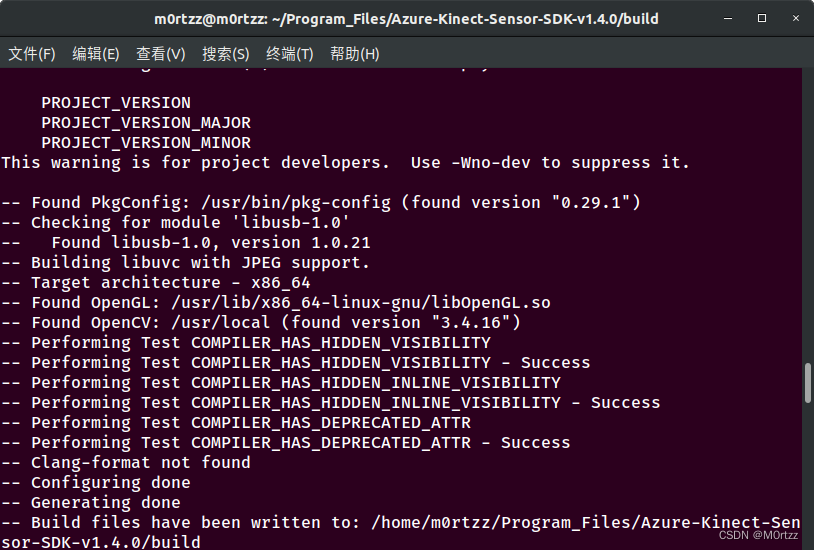
之后输入:
sudo ninja -j$(nproc)
完成后如下:
最后输入:
sudo ninja install
完成后如下:
之后安装依赖:
sudo add-apt-repository ppa:ubuntu-toolchain-r/test
sudo apt update
sudo gedit /etc/apt/sources.list
在最后一行加入:
## gcc-4.9
deb http://dk.archive.ubuntu.com/ubuntu/ xenial main
deb http://dk.archive.ubuntu.com/ubuntu/ xenial universe
##
保存后关闭,打开终端,输入:
sudo apt update
sudo apt install gcc-4.9
sudo apt upgrade libstdc++6
sudo cp /usr/lib/x86_64-linux-gnu/libk4a1.4/libdepthengine.so.2.0 /usr/lib
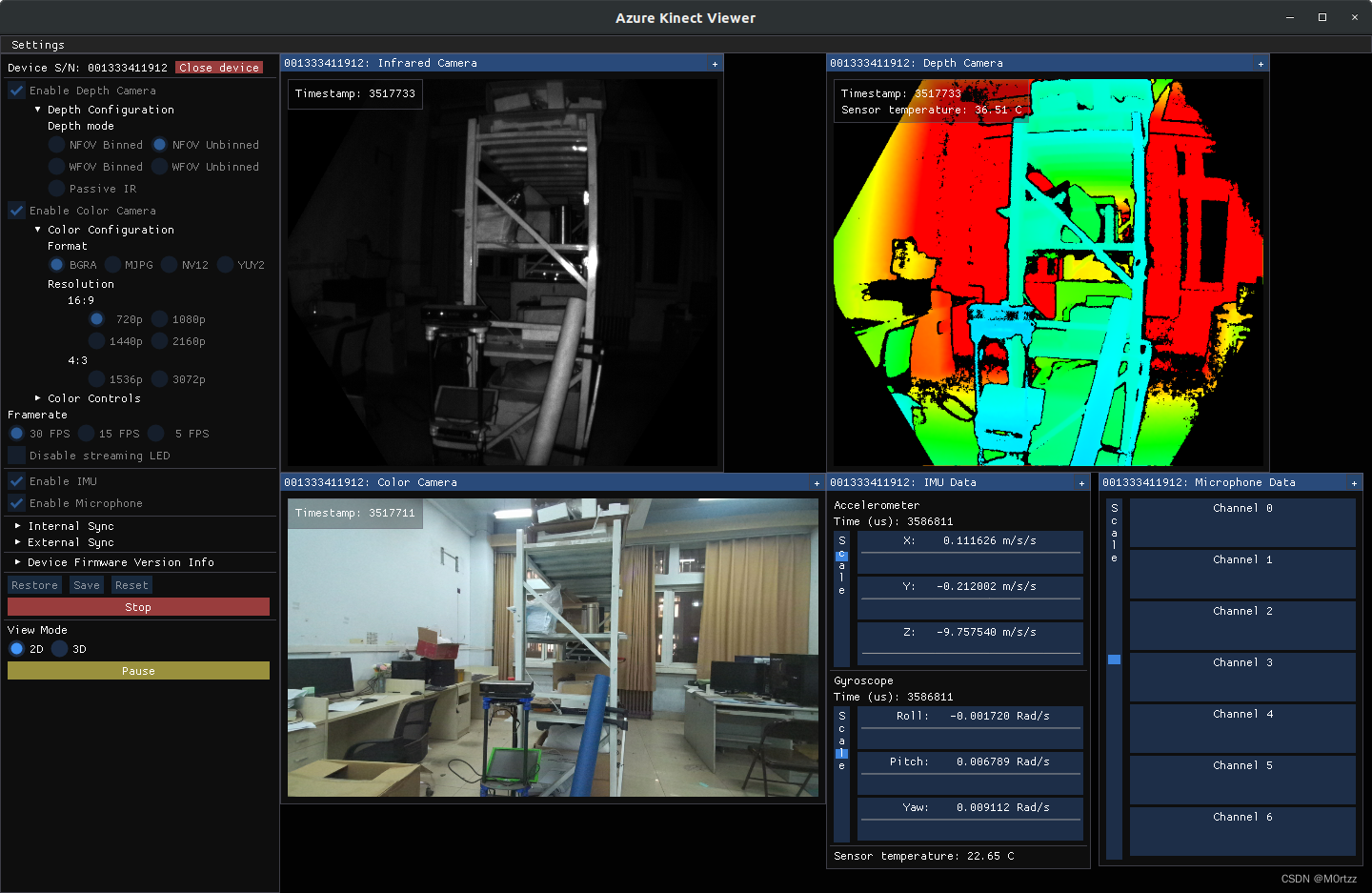
之后测试一下:
sudo ./bin/k4aviewer
授予权限:
cd .. && sudo cp scripts/99-k4a.rules /etc/udev/rules.d
如果说是.deb包安装,该udev规则文件(99-k4a.rules,将其保存在/etc/udev/rules.d下)内容如下(将其保存在/etc/udev/rules.d下):
# Bus 002 Device 116: ID 045e:097a Microsoft Corp. - Generic Superspeed USB Hub
# Bus 001 Device 015: ID 045e:097b Microsoft Corp. - Generic USB Hub
# Bus 002 Device 118: ID 045e:097c Microsoft Corp. - Azure Kinect Depth Camera
# Bus 002 Device 117: ID 045e:097d Microsoft Corp. - Azure Kinect 4K Camera
# Bus 001 Device 016: ID 045e:097e Microsoft Corp. - Azure Kinect Microphone Array
BUS!="usb", ACTION!="add", SUBSYSTEM!=="usb_device", GOTO="k4a_logic_rules_end"
ATTRS{idVendor}=="045e", ATTRS{idProduct}=="097a", MODE="0666", GROUP="plugdev"
ATTRS{idVendor}=="045e", ATTRS{idProduct}=="097b", MODE="0666", GROUP="plugdev"
ATTRS{idVendor}=="045e", ATTRS{idProduct}=="097c", MODE="0666", GROUP="plugdev"
ATTRS{idVendor}=="045e", ATTRS{idProduct}=="097d", MODE="0666", GROUP="plugdev"
ATTRS{idVendor}=="045e", ATTRS{idProduct}=="097e", MODE="0666", GROUP="plugdev"
LABEL="k4a_logic_rules_end"
②Ubuntu20.04,Reference:
https://blog.csdn.net/qq_42108414/article/details/129015474
19.配置科大讯飞
https://www.xfyun.cn/sdk/dispatcher
sudo apt install sox libsox-fmt-all pavucontrol
sudo gedit /usr/include/pcl-1.8/pcl/visualization/cloud_viewer.h
修改一下:
//line 199左右
private:
/** \brief Private implementation. */
struct CloudViewer_impl;
//std::auto_ptr<CloudViewer_impl> impl_;
std::shared_ptr<CloudViewer_impl> impl_;
boost::signals2::connection
registerMouseCallback (boost::function<void (const pcl::visualization::MouseEvent&)>);
下载所需SDK,将libs/x64/libmsc.so文件拷贝至工作空间的某个位置。
cmake_minimum_required(VERSION 3.0.2)
project(tts_voice_test)
SET(CMAKE_CXX_FLAGS "-std=c++0x")
find_package(k4a REQUIRED)
find_package(OpenCV REQUIRED)
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
cv_bridge
message_generation
)
generate_messages(
DEPENDENCIES
std_msgs
)
include_directories(
~/Workspaces/tts_test_ws/include
${catkin_INCLUDE_DIRS}
)
add_executable(tts_voice_test src/tts_voice_test.cpp)
target_link_libraries(tts_voice_test
PRIVATE k4a::k4a
${catkin_LIBRARIES}
${OpenCV_LIBRARIES}
${PCL_LIBRARIES}
-lcurl -ljsoncpp -lmsc -lrt -ldl -pthread -lasound /home/m0rtzz/Workspaces/tts_voice_test_ws/libs/x64/libmsc.so
)
打开终端:
catkin_make
若找不到asoundlib.h文件打开终端输入:
sudo apt install libasound2-dev
编译通过~
20.配置realsense及realsense工作空间
sudo apt install ros-${ROS_DISTRO}-realsense2-camera ros-${ROS_DISTRO}-rgbd-launch
安装realsense sdk:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
sudo apt update
安装realsense lib
sudo apt install librealsense2-dkms librealsense2-utils
测试:
realsense-viewer
下载lib并指定版本为v2.50.0,否则接下来会与realsense-ros版本冲突导致无法打开摄像头:
git clone -b v2.50.0 https://gitcode.com/mirrors/IntelRealSense/librealsense.git librealsense-2.50.0
安装依赖:
sudo apt install libudev-dev pkg-config libgtk-3-dev libusb-1.0-0-dev pkg-config libglfw3-dev
进入刚才克隆的librealsense文件夹内:
cd librealsense-2.50.0/
./scripts/setup_udev_rules.sh
./scripts/patch-realsense-ubuntu-lts.sh
注意:上面的命令可能执行过慢,请耐心等待,或者科学的上网~
完成结果如下:
之后输入:
mkdir build && cd build
# @file : CMakeLists.txt
# NOTE: Modified by M0rtzz
LINK_LIBRARIES(-lcurl -lcrypto)
cmake -j$(nproc) ../ -DCMAKE_BUILD_TYPE=Release -DBUILD_EXAMPLES=true
以下编译过慢,使用CPU最大线程进行make,速度会快很多:
sudo make -j$(nproc)
sudo make install
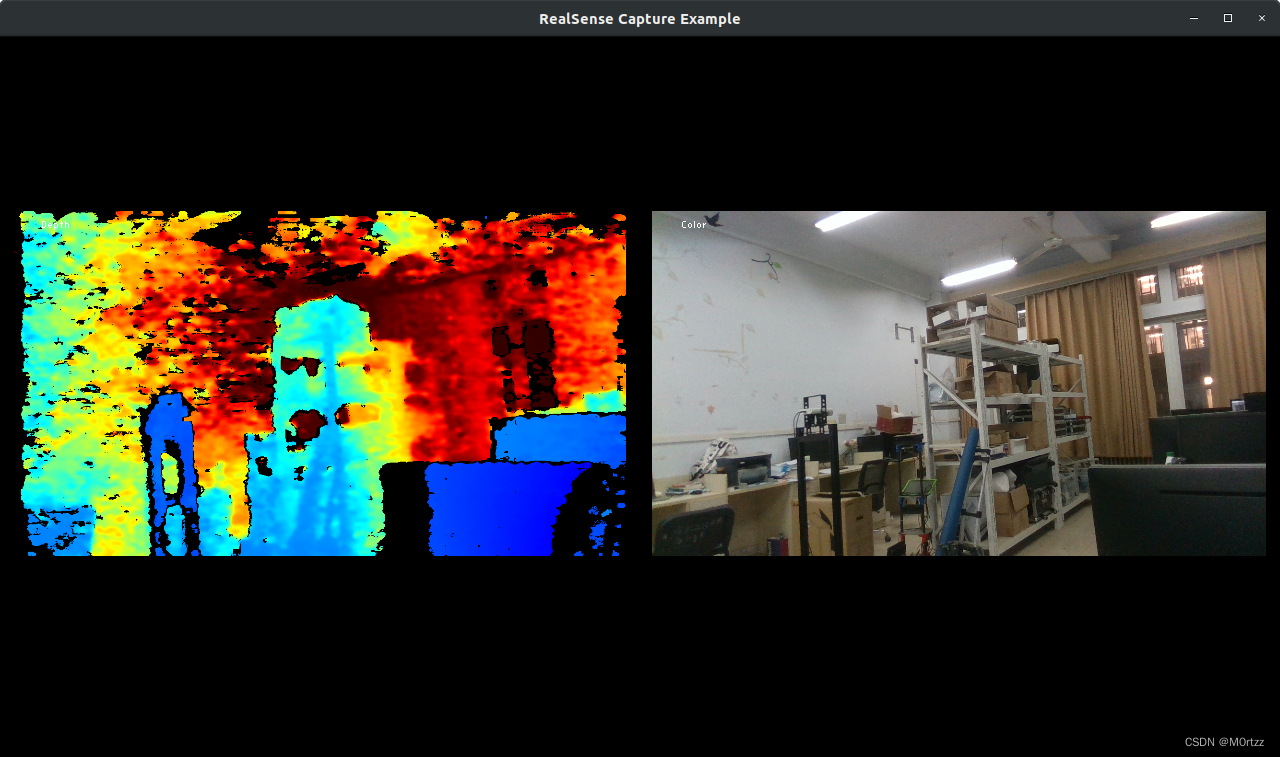
测试:
cd examples/capture
./rs-capture
接下来我们配置realsense工作空间:
创建一个realsense_test_ws文件夹,进入文件夹下,打开终端:
mkdir src && cd src/
下载功能包:
git clone -b ros1-legacy https://gitcode.com/mirrors/IntelRealSense/realsense-ros.git realsense-ros
cd ..
catkin_make -j$(nproc) -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
测试:
roslaunch realsense2_camera rs_camera.launch
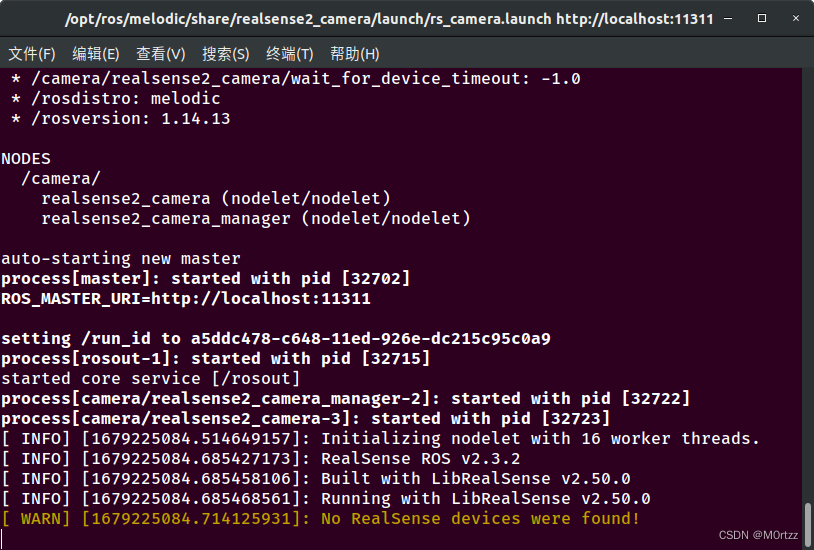
还没安摄像头~
21.配置Kinova机械臂工作空间
mkdir -p kinova_test_ws/src
cd kinova_test_ws/src
catkin_init_workspace
cd ..
catkin_make
echo 'source /home/m0rtzz/Workspaces/kinova_test_ws/devel/setup.bash' >> ~/.bashrc
cd src/
git clone https://gitcode.com/mirrors/Kinovarobotics/kinova-ros.git kinova-ros
cd ..
安装缺少的moveit中相应的功能包 :
sudo apt install ros-${ROS_DISTRO}-moveit-visual-tools ros-${ROS_DISTRO}-moveit-ros-planning-interface
catkin_make -j$(nproc)
sudo cp src/kinova-ros/kinova_driver/udev/10-kinova-arm.rules /etc/udev/rules.d/
安装Moveit和pr2:
sudo apt install $(apt-cache search ros-${ROS_DISTRO}-pr2- | grep -v "ros-${ROS_DISTRO}-pr2-apps" | cut -d' ' -f1)
完成~
22.配置机器人导航(实体)
安装 Arduino IDE:
https://www.arduino.cc/en/software
下载Linux 64bit安装包
tar -xvf arduino-1.8.19-linux64.tar.xz
sudo mv arduino-1.8.19 /opt
cd /opt/arduino-1.8.19
sudo chmod +x install.sh
sudo ./install.sh
sudo apt install ros-${ROS_DISTRO}-move-base* ros-${ROS_DISTRO}-turtlebot3-* ros-${ROS_DISTRO}-dwa-local-planner
sudo apt install ros-${ROS_DISTRO}-joy ros-${ROS_DISTRO}-teleop-twist-joy ros-${ROS_DISTRO}-teleop-twist-keyboard ros-${ROS_DISTRO}-laser-proc ros-${ROS_DISTRO}-rgbd-launch ros-${ROS_DISTRO}-depthimage-to-laserscan ros-${ROS_DISTRO}-rosserial-arduino ros-${ROS_DISTRO}-rosserial-python ros-${ROS_DISTRO}-rosserial-server ros-${ROS_DISTRO}-rosserial-client ros-${ROS_DISTRO}-rosserial-msgs ros-${ROS_DISTRO}-amcl ros-${ROS_DISTRO}-map-server ros-${ROS_DISTRO}-move-base ros-${ROS_DISTRO}-urdf ros-${ROS_DISTRO}-xacro ros-${ROS_DISTRO}-compressed-image-transport ros-${ROS_DISTRO}-rqt-image-view ros-${ROS_DISTRO}-gmapping ros-${ROS_DISTRO}-navigation ros-${ROS_DISTRO}-interactive-markers
安装 gmapping 包(用于构建地图):
sudo apt install ros-${ROS_DISTRO}-gmapping
安装地图服务包(用于保存与读取地图):
sudo apt install ros-${ROS_DISTRO}-map-server
安装 navigation 包(用于定位以及路径规划):
sudo apt install ros-${ROS_DISTRO}-navigation
因tf和tf2迁移问题,需将工作空间内的所有global_costmap_params.yaml和local_costmap_params.yaml文件里的头几行去掉“/”,返回工作空间根目录下重新编译。
Reference:
http://wiki.ros.org/tf2/Migration
首先创建实体导航工作空间:
mkdir -p navigation_entity_test_ws/src
cd navigation_entity_test_ws/src
catkin_create_pkg entity_test roscpp rospy std_msgs gmapping map_server amcl move_base
cd .. && catkin_make
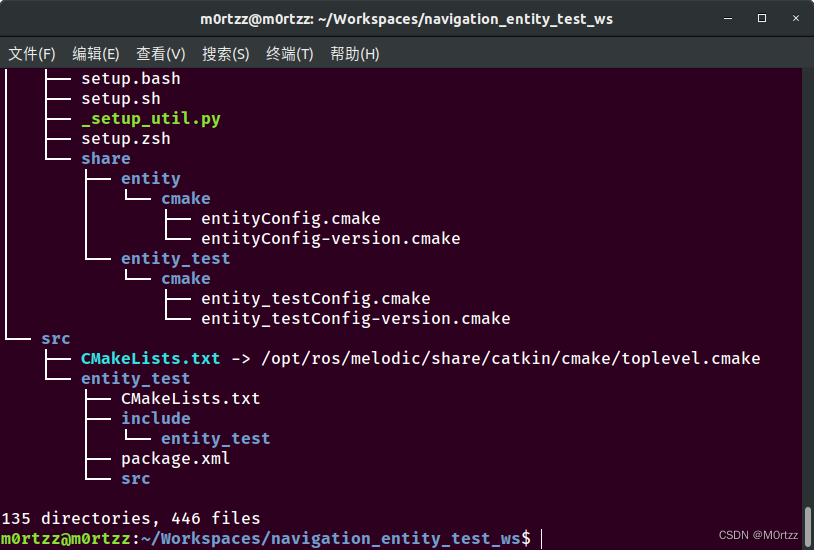
查看一下文件目录,tree命令在下边的PS小节有讲怎么安装
tree .
cd src/ && catkin_create_pkg robot_start_test roscpp rospy std_msgs ros_arduino_python usb_cam rplidar_ros
cd robot_start_test/ && mkdir launch && cd launch && touch start_test.launch
<!--@File Name : start_test.launch
@Brief : 机器人启动文件:
1.启动底盘
2.启动激光雷达
3.启动摄像头
-->
<launch>
<include file="$(find ros_arduino_python)/launch/arduino.launch" />
<include file="$(find usb_cam)/launch/usb_cam-test.launch" />
<include file="$(find rplidar_ros)/launch/rplidar.launch" />
</launch>
FIXME:Updating…
接下来创建机器人模型相关的功能包:
cd src/
catkin_create_pkg robot_description_test urdf xacro
在功能包下新建 urdf 目录,编写具体的 urdf 文件(code命令是VSCode,没安装的小伙伴下边PS小节有下载网址~):
cd robot_description_test/ && mkdir urdf
cd urdf/ && touch {robot.urdf.xacro,robot_base.urdf.xacro,robot_camera.urdf.xacro,robot_laser.urdf.xacro} && code robot.urdf.xacro
将下列代码粘贴进去:
<!-- File Name : robot.urdf.xacro -->
<robot name="robot_test" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="robot_base.urdf.xacro" />
<xacro:include filename="robot_camera.urdf.xacro" />
<xacro:include filename="robot_laser.urdf.xacro" />
</robot>
保存退出,打开终端输入:
code robot_base.urdf.xacro
将下列代码粘贴进去:
<!-- File Name : robot_base.urdf.xacro -->
<robot name="robot_test" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:property name="footprint_radius" value="0.001" />
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="${footprint_radius}" />
</geometry>
</visual>
</link>
<xacro:property name="base_radius" value="0.1" />
<xacro:property name="base_length" value="0.08" />
<xacro:property name="lidi" value="0.015" />
<xacro:property name="base_joint_z" value="${base_length / 2 + lidi}" />
<link name="base_link">
<visual>
<geometry>
<cylinder radius="0.1" length="0.08" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="baselink_color">
<color rgba="1.0 0.5 0.2 0.5" />
</material>
</visual>
</link>
<joint name="link2footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link" />
<origin xyz="0 0 0.055" rpy="0 0 0" />
</joint>
<xacro:property name="wheel_radius" value="0.0325" />
<xacro:property name="wheel_length" value="0.015" />
<xacro:property name="PI" value="3.1415927" />
<xacro:property name="wheel_joint_z" value="${(base_length / 2 + lidi - wheel_radius) * -1}" />
<xacro:macro name="wheel_func" params="wheel_name flag">
<link name="${wheel_name}_wheel">
<visual>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}" />
</geometry>
<origin xyz="0 0 0" rpy="${PI / 2} 0 0" />
<material name="wheel_color">
<color rgba="0 0 0 0.3" />
</material>
</visual>
</link>
<joint name="${wheel_name}2link" type="continuous">
<parent link="base_link" />
<child link="${wheel_name}_wheel" />
<origin xyz="0 ${0.1 * flag} ${wheel_joint_z}" rpy="0 0 0" />
<axis xyz="0 1 0" />
</joint>
</xacro:macro>
<xacro:wheel_func wheel_name="left" flag="1" />
<xacro:wheel_func wheel_name="right" flag="-1" />
<xacro:property name="small_wheel_radius" value="0.0075" />
<xacro:property name="small_joint_z" value="${(base_length / 2 + lidi - small_wheel_radius) * -1}" />
<xacro:macro name="small_wheel_func" params="small_wheel_name flag">
<link name="${small_wheel_name}_wheel">
<visual>
<geometry>
<sphere radius="${small_wheel_radius}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="wheel_color">
<color rgba="0 0 0 0.3" />
</material>
</visual>
</link>
<joint name="${small_wheel_name}2link" type="continuous">
<parent link="base_link" />
<child link="${small_wheel_name}_wheel" />
<origin xyz="${0.08 * flag} 0 ${small_joint_z}" rpy="0 0 0" />
<axis xyz="0 1 0" />
</joint>
</xacro:macro >
<xacro:small_wheel_func small_wheel_name="front" flag="1"/>
<xacro:small_wheel_func small_wheel_name="back" flag="-1"/>
</robot>
保存退出,打开终端输入:
code robot_camera.urdf.xacro
将下列代码粘贴进去:
<!-- File Name : robot_camera.urdf.xacro -->
<robot name="robot_test" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:property name="camera_length" value="0.02" />
<xacro:property name="camera_width" value="0.05" />
<xacro:property name="camera_height" value="0.05" />
<xacro:property name="joint_camera_x" value="0.08" />
<xacro:property name="joint_camera_y" value="0" />
<xacro:property name="joint_camera_z" value="${base_length / 2 + camera_height / 2}" />
<link name="camera">
<visual>
<geometry>
<box size="${camera_length} ${camera_width} ${camera_height}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black">
<color rgba="0 0 0 0.8" />
</material>
</visual>
</link>
<joint name="camera2base" type="fixed">
<parent link="base_link" />
<child link="camera" />
<origin xyz="${joint_camera_x} ${joint_camera_y} ${joint_camera_z}" rpy="0 0 0" />
</joint>
</robot>
保存退出,打开终端输入:
code robot_laser.urdf.xacro
将下列代码粘贴进去:
<!-- File Name : robot_laser.urdf.xacro -->
<robot name="robot_test" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:property name="support_radius" value="0.01" />
<xacro:property name="support_length" value="0.15" />
<xacro:property name="laser_radius" value="0.03" />
<xacro:property name="laser_length" value="0.05" />
<xacro:property name="joint_support_x" value="0" />
<xacro:property name="joint_support_y" value="0" />
<xacro:property name="joint_support_z" value="${base_length / 2 + support_length / 2}" />
<xacro:property name="joint_laser_x" value="0" />
<xacro:property name="joint_laser_y" value="0" />
<xacro:property name="joint_laser_z" value="${support_length / 2 + laser_length / 2}" />
<link name="support">
<visual>
<geometry>
<cylinder radius="${support_radius}" length="${support_length}" />
</geometry>
<material name="yellow">
<color rgba="0.8 0.5 0.0 0.5" />
</material>
</visual>
</link>
<joint name="support2base" type="fixed">
<parent link="base_link" />
<child link="support"/>
<origin xyz="${joint_support_x} ${joint_support_y} ${joint_support_z}" rpy="0 0 0" />
</joint>
<link name="laser">
<visual>
<geometry>
<cylinder radius="${laser_radius}" length="${laser_length}" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.5" />
</material>
</visual>
</link>
<joint name="laser2support" type="fixed">
<parent link="support" />
<child link="laser"/>
<origin xyz="${joint_laser_x} ${joint_laser_y} ${joint_laser_z}" rpy="0 0 0" />
</joint>
</robot>
保存退出,打开终端:
cd .. && mkdir launch
touch robot_test.launch && code robot_test.launch
将下列代码粘贴进去:
<!-- File Name : robot_test.launch -->
<launch>
<param name="robot_description" command="$(find xacro)/xacro $(find robot_description_test)/urdf/robot.urdf.xacro" />
<node pkg="joint_state_publisher" name="joint_state_publisher" type="joint_state_publisher" />
<node pkg="robot_state_publisher" name="robot_state_publisher" type="robot_state_publisher" />
</launch>
保存退出,打开终端:
cd ../../../ && echo 'source /home/m0rtzz/Workspaces/navigation_entity_test_ws/devel/setup.bash' >> ~/.bashrc && source ~/.bashrc
测试一下:
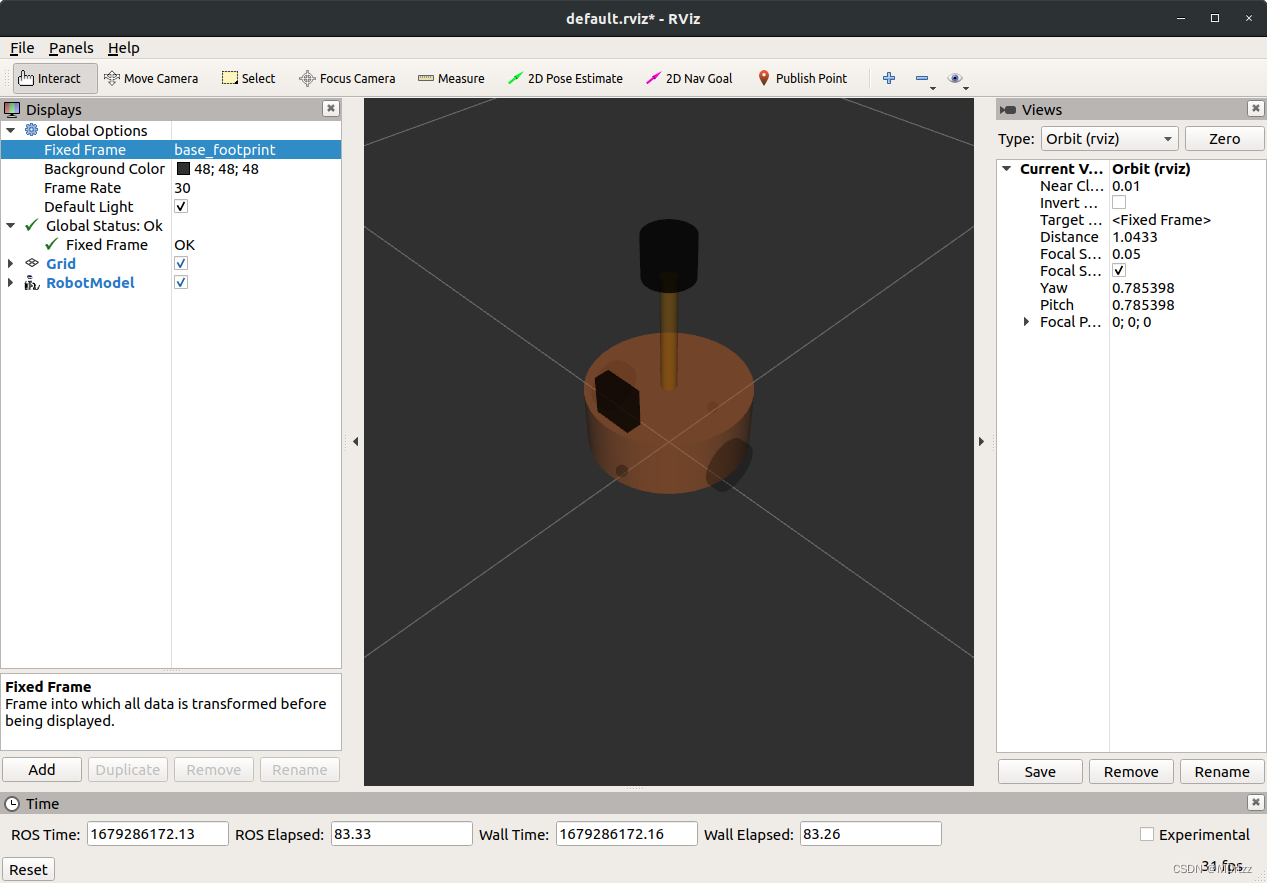
roslaunch robot_description_test robot_test.launch
之后Ctrl+Alt+T打开一个新的终端,输入:
rviz
将 Fixed Frame设置为base_footprint:
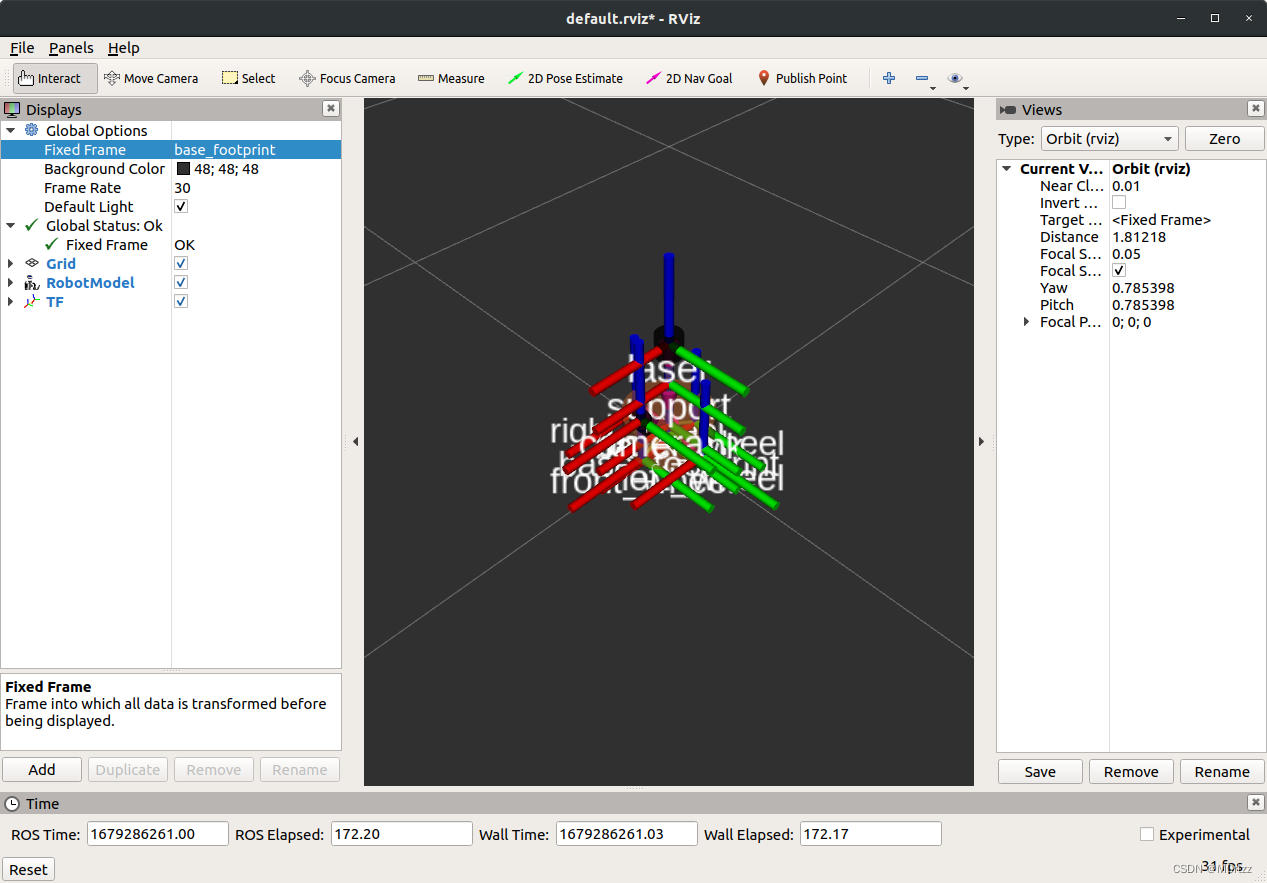
Add一个RobotModel:
Add一个TF:
cd src/entity_test/ && mkdir launch && cd launch/
touch gmapping.launch && code gmapping.launch
将下列代码粘贴进去:
<!-- File Name : gmapping.launch -->
<launch>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<remap from="scan" to="scan"/>
<param name="base_frame" value="base_footprint"/><!--底盘坐标系-->
<param name="odom_frame" value="odom"/> <!--里程计坐标系-->
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="16.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.1"/>
<param name="srt" value="0.2"/>
<param name="str" value="0.1"/>
<param name="stt" value="0.2"/>
<param name="linearUpdate" value="1.0"/>
<param name="angularUpdate" value="0.5"/>
<param name="temporalUpdate" value="3.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="30"/>
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
</node>
</launch>
cd .. && mkdir map
cd launch && touch map_save.launch && code map_save.launch
将下列代码粘贴进去:
<!-- File Name : map_save.launch -->
<launch>
<arg name="filename" value="$(find entity_test)/map/nav" />
<node name="map_save" pkg="map_server" type="map_saver" args="-f $(arg filename)" />
</launch>
touch map_server.launch && code map_server.launch
将下列代码粘贴进去:
<!-- File Name : map_server.launch -->
<launch>
<!-- 设置地图的配置文件 -->
<arg name="map" default="nav.yaml" />
<!-- 运行地图服务器,并且加载设置的地图-->
<node name="map_server" pkg="map_server" type="map_server" args="$(find entity_test)/map/$(arg map)"/>
</launch>
touch amcl.launch && code amcl.launch
将下列代码粘贴进去:
<!-- File Name : amcl.launch -->
<launch>
<node pkg="amcl" type="amcl" name="amcl" output="screen">
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="odom_model_type" value="diff"/><!-- 里程计模式为差分 -->
<param name="odom_alpha5" value="0.1"/>
<param name="transform_tolerance" value="0.2" />
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="30"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="5000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.8"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.2"/>
<param name="update_min_a" value="0.5"/>
<param name="odom_frame_id" value="odom"/><!-- 里程计坐标系 -->
<param name="base_frame_id" value="base_footprint"/><!-- 添加机器人基坐标系 -->
<param name="global_frame_id" value="map"/><!-- 添加地图坐标系 -->
</node>
</launch>
cd .. && mkdir param && cd param/ && touch {costmap_common_params.yaml,local_costmap_params.yaml,global_costmap_params.yaml,base_local_planner_params.yaml} && code .
将下列几个代码分别粘贴进去:
# File Name : base_local_planner_params.yaml
TrajectoryPlannerROS:
# Robot Configuration Parameters
max_vel_x: 0.5 # X 方向最大速度
min_vel_x: 0.1 # X 方向最小速速
max_vel_theta: 1.0 #
min_vel_theta: -1.0
min_in_place_vel_theta: 1.0
acc_lim_x: 1.0 # X 加速限制
acc_lim_y: 0.0 # Y 加速限制
acc_lim_theta: 0.6 # 角速度加速限制
# Goal Tolerance Parameters,目标公差
xy_goal_tolerance: 0.10
yaw_goal_tolerance: 0.05
# Differential-drive robot configuration
# 是否是全向移动机器人
holonomic_robot: false
# Forward Simulation Parameters,前进模拟参数
sim_time: 0.8
vx_samples: 18
vtheta_samples: 20
sim_granularity: 0.05
# File Name : cost_common_params.yaml
#机器人几何参,如果机器人是圆形,设置 robot_radius,如果是其他形状设置 footprint
robot_radius: 0.12 #圆形
# footprint: [[-0.12, -0.12], [-0.12, 0.12], [0.12, 0.12], [0.12, -0.12]] #其他形状
obstacle_range: 3.0 # 用于障碍物探测,比如: 值为 3.0,意味着检测到距离小于 3 米的障碍物时,就会引入代价地图
raytrace_range: 3.5 # 用于清除障碍物,比如:值为 3.5,意味着清除代价地图中 3.5 米以外的障碍物
#膨胀半径,扩展在碰撞区域以外的代价区域,使得机器人规划路径避开障碍物
inflation_radius: 0.2
#代价比例系数,越大则代价值越小
cost_scaling_factor: 3.0
#地图类型
map_type: costmap
#导航包所需要的传感器
observation_sources: scan
#对传感器的坐标系和数据进行配置。这个也会用于代价地图添加和清除障碍物。例如,你可以用激光雷达传感器用于在代价地图添加障碍物,再添加kinect用于导航和清除障碍物。
scan: {sensor_frame: laser, data_type: LaserScan, topic: scan, marking: true, clearing: true}
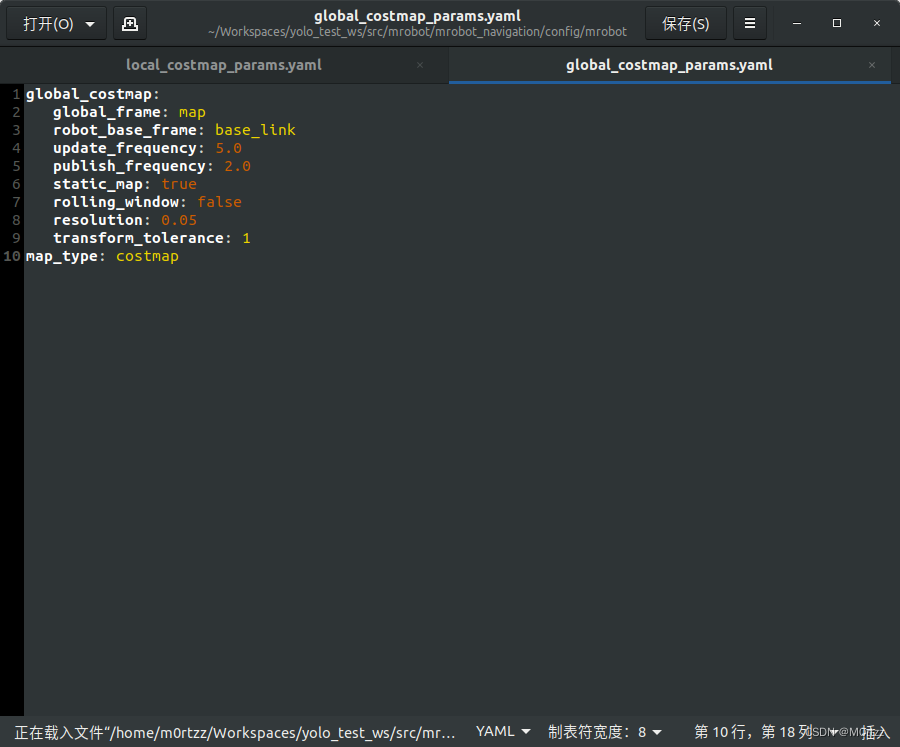
# File Name : global_costmap_params.yaml
global_costmap:
global_frame: map #地图坐标系
robot_base_frame: base_footprint #机器人坐标系
# 以此实现坐标变换
update_frequency: 1.0 #代价地图更新频率
publish_frequency: 1.0 #代价地图的发布频率
transform_tolerance: 0.5 #等待坐标变换发布信息的超时时间
static_map: true # 是否使用一个地图或者地图服务器来初始化全局代价地图,如果不使用静态地图,这个参数为false.
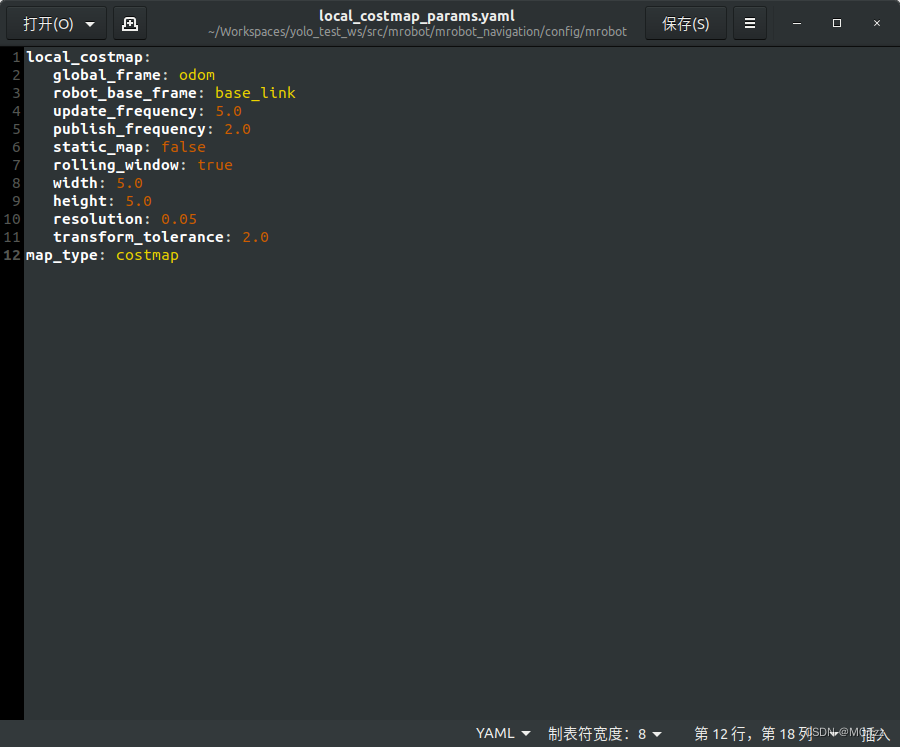
# File Name : local_costmap_params.yaml
local_costmap:
global_frame: odom #里程计坐标系
robot_base_frame: base_footprint #机器人坐标系
update_frequency: 10.0 #代价地图更新频率
publish_frequency: 10.0 #代价地图的发布频率
transform_tolerance: 0.5 #等待坐标变换发布信息的超时时间
static_map: false #不需要静态地图,可以提升导航效果
rolling_window: true #是否使用动态窗口,默认为false,在静态的全局地图中,地图不会变化
width: 3 # 局部地图宽度 单位是 m
height: 3 # 局部地图高度 单位是 m
resolution: 0.05 # 局部地图分辨率 单位是 m,一般与静态地图分辨率保持一致
cd ../launch && touch move_base.launch && code move_base.launch
将下列代码粘贴进去:
<!-- File Name : move_base.launch -->
<launch>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen" clear_params="true">
<rosparam file="$(find nav)/param/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find nav)/param/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find nav)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find nav)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find nav)/param/base_local_planner_params.yaml" command="load" />
</node>
</launch>
touch auto_slam.launch && code auto_slam.launch
将下列代码粘贴进去:
<!-- File Name : auto_slam.launch -->
<launch>
<!-- 启动SLAM节点 -->
<include file="$(find entity_test)/launch/gmapping.launch" />
<!-- 运行move_base节点 -->
<include file="$(find entity_test)/launch/move_base.launch" />
</launch>
23.安装配置caffe
Reference:
https://blog.csdn.net/weixin_39161727/article/details/120136500
首先安装依赖:
sudo apt install libprotobuf-dev libleveldb-dev libsnappy-dev libopencv-dev libhdf5-serial-dev protobuf-compiler libatlas-base-dev libgflags-dev libgoogle-glog-dev liblmdb-dev && sudo apt install --no-install-recommends libboost-all-dev
git clone https://gitcode.com/mirrors/BVLC/caffe.git caffe
cd caffe/ && sudo cp Makefile.config.example Makefile.config
gedit Makefile.config
## Refer to http://caffe.berkeleyvision.org/installation.html
# Contributions simplifying and improving our build system are welcome!
# cuDNN acceleration switch (uncomment to build with cuDNN).
USE_CUDNN := 1
# CPU-only switch (uncomment to build without GPU support).
# CPU_ONLY := 1
# uncomment to disable IO dependencies and corresponding data layers
# USE_OPENCV := 0
# USE_LEVELDB := 0
# USE_LMDB := 0
# This code is taken from https://github.com/sh1r0/caffe-android-lib
# USE_HDF5 := 0
# uncomment to allow MDB_NOLOCK when reading LMDB files (only if necessary)
# You should not set this flag if you will be reading LMDBs with any
# possibility of simultaneous read and write
# ALLOW_LMDB_NOLOCK := 1
# Uncomment if you're using OpenCV 3
OPENCV_VERSION := 3
# To customize your choice of compiler, uncomment and set the following.
# N.B. the default for Linux is g++ and the default for OSX is clang++
CUSTOM_CXX := g++
# CUDA directory contains bin/ and lib/ directories that we need.
CUDA_DIR := /usr/local/cuda
# On Ubuntu 14.04, if cuda tools are installed via
# "sudo apt-get install nvidia-cuda-toolkit" then use this instead:
# CUDA_DIR := /usr
# CUDA architecture setting: going with all of them.
# For CUDA < 6.0, comment the *_50 through *_61 lines for compatibility.
# For CUDA < 8.0, comment the *_60 and *_61 lines for compatibility.
# For CUDA >= 9.0, comment the *_20 and *_21 lines for compatibility.
CUDA_ARCH := #-gencode arch=compute_20,code=sm_20 \
#-gencode arch=compute_20,code=sm_21 \
#-gencode arch=compute_30,code=sm_30 \
-gencode arch=compute_35,code=sm_35 \
-gencode arch=compute_50,code=sm_50 \
-gencode arch=compute_52,code=sm_52 \
-gencode arch=compute_60,code=sm_60 \
-gencode arch=compute_61,code=sm_61 \
-gencode arch=compute_61,code=compute_61
# BLAS choice:
# atlas for ATLAS (default)
# mkl for MKL
# open for OpenBlas
BLAS := open
# Custom (MKL/ATLAS/OpenBLAS) include and lib directories.
# Leave commented to accept the defaults for your choice of BLAS
# (which should work)!
# BLAS_INCLUDE := /path/to/your/blas
# BLAS_LIB := /path/to/your/blas
# Homebrew puts openblas in a directory that is not on the standard search path
# BLAS_INCLUDE := $(shell brew --prefix openblas)/include
# BLAS_LIB := $(shell brew --prefix openblas)/lib
# This is required only if you will compile the matlab interface.
# MATLAB directory should contain the mex binary in /bin.
# MATLAB_DIR := /usr/local
# MATLAB_DIR := /Applications/MATLAB_R2012b.app
# NOTE: this is required only if you will compile the python interface.
# We need to be able to find Python.h and numpy/arrayobject.h.
PYTHON_INCLUDE := /usr/include/python2.7 \
/usr/lib/python2.7/dist-packages/numpy/core/include
# Anaconda Python distribution is quite popular. Include path:
# Verify anaconda location, sometimes it's in root.
# ANACONDA_HOME := $(HOME)/anaconda
# PYTHON_INCLUDE := $(ANACONDA_HOME)/include \
# $(ANACONDA_HOME)/include/python2.7 \
# $(ANACONDA_HOME)/lib/python2.7/site-packages/numpy/core/include
# Uncomment to use Python 3 (default is Python 2)
PYTHON_LIBRARIES := boost_python3 python3.6m
PYTHON_INCLUDE := /usr/include/python3.6m \
/usr/lib/python3.6/dist-packages/numpy/core/include
# We need to be able to find libpythonX.X.so or .dylib.
PYTHON_LIB := /usr/lib
# PYTHON_LIB := $(ANACONDA_HOME)/lib
# Homebrew installs numpy in a non standard path (keg only)
# PYTHON_INCLUDE += $(dir $(shell python -c 'import numpy.core; print(numpy.core.__file__)'))/include
# PYTHON_LIB += $(shell brew --prefix numpy)/lib
# Uncomment to support layers written in Python (will link against Python libs)
WITH_PYTHON_LAYER := 1
# Whatever else you find you need goes here.
INCLUDE_DIRS := $(PYTHON_INCLUDE) /usr/local/include /usr/include/hdf5/serial/
LIBRARY_DIRS := $(PYTHON_LIB) /usr/local/lib /usr/lib /usr/lib/x86_64-linux-gnu/hdf5/serial/
# If Homebrew is installed at a non standard location (for example your home directory) and you use it for general dependencies
# INCLUDE_DIRS += $(shell brew --prefix)/include
# LIBRARY_DIRS += $(shell brew --prefix)/lib
# NCCL acceleration switch (uncomment to build with NCCL)
# https://github.com/NVIDIA/nccl (last tested version: v1.2.3-1+cuda8.0)
# USE_NCCL := 1
# Uncomment to use `pkg-config` to specify OpenCV library paths.
# (Usually not necessary -- OpenCV libraries are normally installed in one of the above $LIBRARY_DIRS.)
# USE_PKG_CONFIG := 1
# N.B. both build and distribute dirs are cleared on `make clean`
BUILD_DIR := build
DISTRIBUTE_DIR := distribute
# Uncomment for debugging. Does not work on OSX due to https://github.com/BVLC/caffe/issues/171
# DEBUG := 1
# The ID of the GPU that 'make runtest' will use to run unit tests.
TEST_GPUID := 0
# enable pretty build (comment to see full commands)
Q ?= @
gedit Makefile
PROJECT := caffe
CONFIG_FILE := Makefile.config
# Explicitly check for the config file, otherwise make -k will proceed anyway.
ifeq ($(wildcard $(CONFIG_FILE)),)
$(error $(CONFIG_FILE) not found. See $(CONFIG_FILE).example.)
endif
include $(CONFIG_FILE)
BUILD_DIR_LINK := $(BUILD_DIR)
ifeq ($(RELEASE_BUILD_DIR),)
RELEASE_BUILD_DIR := .$(BUILD_DIR)_release
endif
ifeq ($(DEBUG_BUILD_DIR),)
DEBUG_BUILD_DIR := .$(BUILD_DIR)_debug
endif
DEBUG ?= 0
ifeq ($(DEBUG), 1)
BUILD_DIR := $(DEBUG_BUILD_DIR)
OTHER_BUILD_DIR := $(RELEASE_BUILD_DIR)
else
BUILD_DIR := $(RELEASE_BUILD_DIR)
OTHER_BUILD_DIR := $(DEBUG_BUILD_DIR)
endif
# All of the directories containing code.
SRC_DIRS := $(shell find * -type d -exec bash -c "find {} -maxdepth 1 \
\( -name '*.cpp' -o -name '*.proto' \) | grep -q ." \; -print)
# The target shared library name
LIBRARY_NAME := $(PROJECT)
LIB_BUILD_DIR := $(BUILD_DIR)/lib
STATIC_NAME := $(LIB_BUILD_DIR)/lib$(LIBRARY_NAME).a
DYNAMIC_VERSION_MAJOR := 1
DYNAMIC_VERSION_MINOR := 0
DYNAMIC_VERSION_REVISION := 0
DYNAMIC_NAME_SHORT := lib$(LIBRARY_NAME).so
#DYNAMIC_SONAME_SHORT := $(DYNAMIC_NAME_SHORT).$(DYNAMIC_VERSION_MAJOR)
DYNAMIC_VERSIONED_NAME_SHORT := $(DYNAMIC_NAME_SHORT).$(DYNAMIC_VERSION_MAJOR).$(DYNAMIC_VERSION_MINOR).$(DYNAMIC_VERSION_REVISION)
DYNAMIC_NAME := $(LIB_BUILD_DIR)/$(DYNAMIC_VERSIONED_NAME_SHORT)
COMMON_FLAGS += -DCAFFE_VERSION=$(DYNAMIC_VERSION_MAJOR).$(DYNAMIC_VERSION_MINOR).$(DYNAMIC_VERSION_REVISION)
##############################
# Get all source files
##############################
# CXX_SRCS are the source files excluding the test ones.
CXX_SRCS := $(shell find src/$(PROJECT) ! -name "test_*.cpp" -name "*.cpp")
# CU_SRCS are the cuda source files
CU_SRCS := $(shell find src/$(PROJECT) ! -name "test_*.cu" -name "*.cu")
# TEST_SRCS are the test source files
TEST_MAIN_SRC := src/$(PROJECT)/test/test_caffe_main.cpp
TEST_SRCS := $(shell find src/$(PROJECT) -name "test_*.cpp")
TEST_SRCS := $(filter-out $(TEST_MAIN_SRC), $(TEST_SRCS))
TEST_CU_SRCS := $(shell find src/$(PROJECT) -name "test_*.cu")
GTEST_SRC := src/gtest/gtest-all.cpp
# TOOL_SRCS are the source files for the tool binaries
TOOL_SRCS := $(shell find tools -name "*.cpp")
# EXAMPLE_SRCS are the source files for the example binaries
EXAMPLE_SRCS := $(shell find examples -name "*.cpp")
# BUILD_INCLUDE_DIR contains any generated header files we want to include.
BUILD_INCLUDE_DIR := $(BUILD_DIR)/src
# PROTO_SRCS are the protocol buffer definitions
PROTO_SRC_DIR := src/$(PROJECT)/proto
PROTO_SRCS := $(wildcard $(PROTO_SRC_DIR)/*.proto)
# PROTO_BUILD_DIR will contain the .cc and obj files generated from
# PROTO_SRCS; PROTO_BUILD_INCLUDE_DIR will contain the .h header files
PROTO_BUILD_DIR := $(BUILD_DIR)/$(PROTO_SRC_DIR)
PROTO_BUILD_INCLUDE_DIR := $(BUILD_INCLUDE_DIR)/$(PROJECT)/proto
# NONGEN_CXX_SRCS includes all source/header files except those generated
# automatically (e.g., by proto).
NONGEN_CXX_SRCS := $(shell find \
src/$(PROJECT) \
include/$(PROJECT) \
python/$(PROJECT) \
matlab/+$(PROJECT)/private \
examples \
tools \
-name "*.cpp" -or -name "*.hpp" -or -name "*.cu" -or -name "*.cuh")
LINT_SCRIPT := scripts/cpp_lint.py
LINT_OUTPUT_DIR := $(BUILD_DIR)/.lint
LINT_EXT := lint.txt
LINT_OUTPUTS := $(addsuffix .$(LINT_EXT), $(addprefix $(LINT_OUTPUT_DIR)/, $(NONGEN_CXX_SRCS)))
EMPTY_LINT_REPORT := $(BUILD_DIR)/.$(LINT_EXT)
NONEMPTY_LINT_REPORT := $(BUILD_DIR)/$(LINT_EXT)
# PY$(PROJECT)_SRC is the python wrapper for $(PROJECT)
PY$(PROJECT)_SRC := python/$(PROJECT)/_$(PROJECT).cpp
PY$(PROJECT)_SO := python/$(PROJECT)/_$(PROJECT).so
PY$(PROJECT)_HXX := include/$(PROJECT)/layers/python_layer.hpp
# MAT$(PROJECT)_SRC is the mex entrance point of matlab package for $(PROJECT)
MAT$(PROJECT)_SRC := matlab/+$(PROJECT)/private/$(PROJECT)_.cpp
ifneq ($(MATLAB_DIR),)
MAT_SO_EXT := $(shell $(MATLAB_DIR)/bin/mexext)
endif
MAT$(PROJECT)_SO := matlab/+$(PROJECT)/private/$(PROJECT)_.$(MAT_SO_EXT)
##############################
# Derive generated files
##############################
# The generated files for protocol buffers
PROTO_GEN_HEADER_SRCS := $(addprefix $(PROTO_BUILD_DIR)/, \
$(notdir ${PROTO_SRCS:.proto=.pb.h}))
PROTO_GEN_HEADER := $(addprefix $(PROTO_BUILD_INCLUDE_DIR)/, \
$(notdir ${PROTO_SRCS:.proto=.pb.h}))
PROTO_GEN_CC := $(addprefix $(BUILD_DIR)/, ${PROTO_SRCS:.proto=.pb.cc})
PY_PROTO_BUILD_DIR := python/$(PROJECT)/proto
PY_PROTO_INIT := python/$(PROJECT)/proto/__init__.py
PROTO_GEN_PY := $(foreach file,${PROTO_SRCS:.proto=_pb2.py}, \
$(PY_PROTO_BUILD_DIR)/$(notdir $(file)))
# The objects corresponding to the source files
# These objects will be linked into the final shared library, so we
# exclude the tool, example, and test objects.
CXX_OBJS := $(addprefix $(BUILD_DIR)/, ${CXX_SRCS:.cpp=.o})
CU_OBJS := $(addprefix $(BUILD_DIR)/cuda/, ${CU_SRCS:.cu=.o})
PROTO_OBJS := ${PROTO_GEN_CC:.cc=.o}
OBJS := $(PROTO_OBJS) $(CXX_OBJS) $(CU_OBJS)
# tool, example, and test objects
TOOL_OBJS := $(addprefix $(BUILD_DIR)/, ${TOOL_SRCS:.cpp=.o})
TOOL_BUILD_DIR := $(BUILD_DIR)/tools
TEST_CXX_BUILD_DIR := $(BUILD_DIR)/src/$(PROJECT)/test
TEST_CU_BUILD_DIR := $(BUILD_DIR)/cuda/src/$(PROJECT)/test
TEST_CXX_OBJS := $(addprefix $(BUILD_DIR)/, ${TEST_SRCS:.cpp=.o})
TEST_CU_OBJS := $(addprefix $(BUILD_DIR)/cuda/, ${TEST_CU_SRCS:.cu=.o})
TEST_OBJS := $(TEST_CXX_OBJS) $(TEST_CU_OBJS)
GTEST_OBJ := $(addprefix $(BUILD_DIR)/, ${GTEST_SRC:.cpp=.o})
EXAMPLE_OBJS := $(addprefix $(BUILD_DIR)/, ${EXAMPLE_SRCS:.cpp=.o})
# Output files for automatic dependency generation
DEPS := ${CXX_OBJS:.o=.d} ${CU_OBJS:.o=.d} ${TEST_CXX_OBJS:.o=.d} \
${TEST_CU_OBJS:.o=.d} $(BUILD_DIR)/${MAT$(PROJECT)_SO:.$(MAT_SO_EXT)=.d}
# tool, example, and test bins
TOOL_BINS := ${TOOL_OBJS:.o=.bin}
EXAMPLE_BINS := ${EXAMPLE_OBJS:.o=.bin}
# symlinks to tool bins without the ".bin" extension
TOOL_BIN_LINKS := ${TOOL_BINS:.bin=}
# Put the test binaries in build/test for convenience.
TEST_BIN_DIR := $(BUILD_DIR)/test
TEST_CU_BINS := $(addsuffix .testbin,$(addprefix $(TEST_BIN_DIR)/, \
$(foreach obj,$(TEST_CU_OBJS),$(basename $(notdir $(obj))))))
TEST_CXX_BINS := $(addsuffix .testbin,$(addprefix $(TEST_BIN_DIR)/, \
$(foreach obj,$(TEST_CXX_OBJS),$(basename $(notdir $(obj))))))
TEST_BINS := $(TEST_CXX_BINS) $(TEST_CU_BINS)
# TEST_ALL_BIN is the test binary that links caffe dynamically.
TEST_ALL_BIN := $(TEST_BIN_DIR)/test_all.testbin
##############################
# Derive compiler warning dump locations
##############################
WARNS_EXT := warnings.txt
CXX_WARNS := $(addprefix $(BUILD_DIR)/, ${CXX_SRCS:.cpp=.o.$(WARNS_EXT)})
CU_WARNS := $(addprefix $(BUILD_DIR)/cuda/, ${CU_SRCS:.cu=.o.$(WARNS_EXT)})
TOOL_WARNS := $(addprefix $(BUILD_DIR)/, ${TOOL_SRCS:.cpp=.o.$(WARNS_EXT)})
EXAMPLE_WARNS := $(addprefix $(BUILD_DIR)/, ${EXAMPLE_SRCS:.cpp=.o.$(WARNS_EXT)})
TEST_WARNS := $(addprefix $(BUILD_DIR)/, ${TEST_SRCS:.cpp=.o.$(WARNS_EXT)})
TEST_CU_WARNS := $(addprefix $(BUILD_DIR)/cuda/, ${TEST_CU_SRCS:.cu=.o.$(WARNS_EXT)})
ALL_CXX_WARNS := $(CXX_WARNS) $(TOOL_WARNS) $(EXAMPLE_WARNS) $(TEST_WARNS)
ALL_CU_WARNS := $(CU_WARNS) $(TEST_CU_WARNS)
ALL_WARNS := $(ALL_CXX_WARNS) $(ALL_CU_WARNS)
EMPTY_WARN_REPORT := $(BUILD_DIR)/.$(WARNS_EXT)
NONEMPTY_WARN_REPORT := $(BUILD_DIR)/$(WARNS_EXT)
##############################
# Derive include and lib directories
##############################
CUDA_INCLUDE_DIR := $(CUDA_DIR)/include
CUDA_LIB_DIR :=
# add <cuda>/lib64 only if it exists
ifneq ("$(wildcard $(CUDA_DIR)/lib64)","")
CUDA_LIB_DIR += $(CUDA_DIR)/lib64
endif
CUDA_LIB_DIR += $(CUDA_DIR)/lib
INCLUDE_DIRS += $(BUILD_INCLUDE_DIR) ./src ./include
ifneq ($(CPU_ONLY), 1)
INCLUDE_DIRS += $(CUDA_INCLUDE_DIR)
LIBRARY_DIRS += $(CUDA_LIB_DIR)
LIBRARIES := cudart cublas curand
endif
LIBRARIES += glog gflags protobuf boost_system boost_filesystem m hdf5_serial_hl hdf5_serial
# handle IO dependencies
USE_LEVELDB ?= 1
USE_LMDB ?= 1
# This code is taken from https://github.com/sh1r0/caffe-android-lib
USE_HDF5 ?= 1
USE_OPENCV ?= 1
ifeq ($(USE_LEVELDB), 1)
LIBRARIES += leveldb snappy
endif
ifeq ($(USE_LMDB), 1)
LIBRARIES += lmdb
endif
# This code is taken from https://github.com/sh1r0/caffe-android-lib
ifeq ($(USE_HDF5), 1)
LIBRARIES += hdf5_hl hdf5
endif
ifeq ($(USE_OPENCV), 1)
LIBRARIES += opencv_core opencv_highgui opencv_imgproc
ifeq ($(OPENCV_VERSION), 3)
LIBRARIES += opencv_imgcodecs
endif
endif
PYTHON_LIBRARIES ?= boost_python python2.7
WARNINGS := -Wall -Wno-sign-compare
##############################
# Set build directories
##############################
DISTRIBUTE_DIR ?= distribute
DISTRIBUTE_SUBDIRS := $(DISTRIBUTE_DIR)/bin $(DISTRIBUTE_DIR)/lib
DIST_ALIASES := dist
ifneq ($(strip $(DISTRIBUTE_DIR)),distribute)
DIST_ALIASES += distribute
endif
ALL_BUILD_DIRS := $(sort $(BUILD_DIR) $(addprefix $(BUILD_DIR)/, $(SRC_DIRS)) \
$(addprefix $(BUILD_DIR)/cuda/, $(SRC_DIRS)) \
$(LIB_BUILD_DIR) $(TEST_BIN_DIR) $(PY_PROTO_BUILD_DIR) $(LINT_OUTPUT_DIR) \
$(DISTRIBUTE_SUBDIRS) $(PROTO_BUILD_INCLUDE_DIR))
##############################
# Set directory for Doxygen-generated documentation
##############################
DOXYGEN_CONFIG_FILE ?= ./.Doxyfile
# should be the same as OUTPUT_DIRECTORY in the .Doxyfile
DOXYGEN_OUTPUT_DIR ?= ./doxygen
DOXYGEN_COMMAND ?= doxygen
# All the files that might have Doxygen documentation.
DOXYGEN_SOURCES := $(shell find \
src/$(PROJECT) \
include/$(PROJECT) \
python/ \
matlab/ \
examples \
tools \
-name "*.cpp" -or -name "*.hpp" -or -name "*.cu" -or -name "*.cuh" -or \
-name "*.py" -or -name "*.m")
DOXYGEN_SOURCES += $(DOXYGEN_CONFIG_FILE)
##############################
# Configure build
##############################
# Determine platform
UNAME := $(shell uname -s)
ifeq ($(UNAME), Linux)
LINUX := 1
else ifeq ($(UNAME), Darwin)
OSX := 1
OSX_MAJOR_VERSION := $(shell sw_vers -productVersion | cut -f 1 -d .)
OSX_MINOR_VERSION := $(shell sw_vers -productVersion | cut -f 2 -d .)
endif
# Linux
ifeq ($(LINUX), 1)
CXX ?= /usr/bin/g++
GCCVERSION := $(shell $(CXX) -dumpversion | cut -f1,2 -d.)
# older versions of gcc are too dumb to build boost with -Wuninitalized
ifeq ($(shell echo | awk '{exit $(GCCVERSION) < 4.6;}'), 1)
WARNINGS += -Wno-uninitialized
endif
# boost::thread is reasonably called boost_thread (compare OS X)
# We will also explicitly add stdc++ to the link target.
LIBRARIES += boost_thread stdc++
VERSIONFLAGS += -Wl,-soname,$(DYNAMIC_VERSIONED_NAME_SHORT) -Wl,-rpath,$(ORIGIN)/../lib
endif
# OS X:
# clang++ instead of g++
# libstdc++ for NVCC compatibility on OS X >= 10.9 with CUDA < 7.0
ifeq ($(OSX), 1)
CXX := /usr/bin/clang++
ifneq ($(CPU_ONLY), 1)
CUDA_VERSION := $(shell $(CUDA_DIR)/bin/nvcc -V | grep -o 'release [0-9.]*' | tr -d '[a-z ]')
ifeq ($(shell echo | awk '{exit $(CUDA_VERSION) < 7.0;}'), 1)
CXXFLAGS += -stdlib=libstdc++
LINKFLAGS += -stdlib=libstdc++
endif
# clang throws this warning for cuda headers
WARNINGS += -Wno-unneeded-internal-declaration
# 10.11 strips DYLD_* env vars so link CUDA (rpath is available on 10.5+)
OSX_10_OR_LATER := $(shell [ $(OSX_MAJOR_VERSION) -ge 10 ] && echo true)
OSX_10_5_OR_LATER := $(shell [ $(OSX_MINOR_VERSION) -ge 5 ] && echo true)
ifeq ($(OSX_10_OR_LATER),true)
ifeq ($(OSX_10_5_OR_LATER),true)
LDFLAGS += -Wl,-rpath,$(CUDA_LIB_DIR)
endif
endif
endif
# gtest needs to use its own tuple to not conflict with clang
COMMON_FLAGS += -DGTEST_USE_OWN_TR1_TUPLE=1
# boost::thread is called boost_thread-mt to mark multithreading on OS X
LIBRARIES += boost_thread-mt
# we need to explicitly ask for the rpath to be obeyed
ORIGIN := @loader_path
VERSIONFLAGS += -Wl,-install_name,@rpath/$(DYNAMIC_VERSIONED_NAME_SHORT) -Wl,-rpath,$(ORIGIN)/../../build/lib
else
ORIGIN := \$$ORIGIN
endif
# Custom compiler
ifdef CUSTOM_CXX
CXX := $(CUSTOM_CXX)
endif
# Static linking
ifneq (,$(findstring clang++,$(CXX)))
STATIC_LINK_COMMAND := -Wl,-force_load $(STATIC_NAME)
else ifneq (,$(findstring g++,$(CXX)))
STATIC_LINK_COMMAND := -Wl,--whole-archive $(STATIC_NAME) -Wl,--no-whole-archive
else
# The following line must not be indented with a tab, since we are not inside a target
$(error Cannot static link with the $(CXX) compiler)
endif
# Debugging
ifeq ($(DEBUG), 1)
COMMON_FLAGS += -DDEBUG -g -O0
NVCCFLAGS += -G
else
COMMON_FLAGS += -DNDEBUG -O2
endif
# cuDNN acceleration configuration.
ifeq ($(USE_CUDNN), 1)
LIBRARIES += cudnn
COMMON_FLAGS += -DUSE_CUDNN
endif
# NCCL acceleration configuration
ifeq ($(USE_NCCL), 1)
LIBRARIES += nccl
COMMON_FLAGS += -DUSE_NCCL
endif
# configure IO libraries
ifeq ($(USE_OPENCV), 1)
COMMON_FLAGS += -DUSE_OPENCV
endif
ifeq ($(USE_LEVELDB), 1)
COMMON_FLAGS += -DUSE_LEVELDB
endif
ifeq ($(USE_LMDB), 1)
COMMON_FLAGS += -DUSE_LMDB
ifeq ($(ALLOW_LMDB_NOLOCK), 1)
COMMON_FLAGS += -DALLOW_LMDB_NOLOCK
endif
endif
# This code is taken from https://github.com/sh1r0/caffe-android-lib
ifeq ($(USE_HDF5), 1)
COMMON_FLAGS += -DUSE_HDF5
endif
# CPU-only configuration
ifeq ($(CPU_ONLY), 1)
OBJS := $(PROTO_OBJS) $(CXX_OBJS)
TEST_OBJS := $(TEST_CXX_OBJS)
TEST_BINS := $(TEST_CXX_BINS)
ALL_WARNS := $(ALL_CXX_WARNS)
TEST_FILTER := --gtest_filter="-*GPU*"
COMMON_FLAGS += -DCPU_ONLY
endif
# Python layer support
ifeq ($(WITH_PYTHON_LAYER), 1)
COMMON_FLAGS += -DWITH_PYTHON_LAYER
LIBRARIES += $(PYTHON_LIBRARIES)
endif
# BLAS configuration (default = ATLAS)
BLAS ?= atlas
ifeq ($(BLAS), mkl)
# MKL
LIBRARIES += mkl_rt
COMMON_FLAGS += -DUSE_MKL
MKLROOT ?= /opt/intel/mkl
BLAS_INCLUDE ?= $(MKLROOT)/include
BLAS_LIB ?= $(MKLROOT)/lib $(MKLROOT)/lib/intel64
else ifeq ($(BLAS), open)
# OpenBLAS
LIBRARIES += openblas
else
# ATLAS
ifeq ($(LINUX), 1)
ifeq ($(BLAS), atlas)
# Linux simply has cblas and atlas
LIBRARIES += cblas atlas
endif
else ifeq ($(OSX), 1)
# OS X packages atlas as the vecLib framework
LIBRARIES += cblas
# 10.10 has accelerate while 10.9 has veclib
XCODE_CLT_VER := $(shell pkgutil --pkg-info=com.apple.pkg.CLTools_Executables | grep 'version' | sed 's/[^0-9]*\([0-9]\).*/\1/')
XCODE_CLT_GEQ_7 := $(shell [ $(XCODE_CLT_VER) -gt 6 ] && echo 1)
XCODE_CLT_GEQ_6 := $(shell [ $(XCODE_CLT_VER) -gt 5 ] && echo 1)
ifeq ($(XCODE_CLT_GEQ_7), 1)
BLAS_INCLUDE ?= /Applications/Xcode.app/Contents/Developer/Platforms/MacOSX.platform/Developer/SDKs/$(shell ls /Applications/Xcode.app/Contents/Developer/Platforms/MacOSX.platform/Developer/SDKs/ | sort | tail -1)/System/Library/Frameworks/Accelerate.framework/Versions/A/Frameworks/vecLib.framework/Versions/A/Headers
else ifeq ($(XCODE_CLT_GEQ_6), 1)
BLAS_INCLUDE ?= /System/Library/Frameworks/Accelerate.framework/Versions/Current/Frameworks/vecLib.framework/Headers/
LDFLAGS += -framework Accelerate
else
BLAS_INCLUDE ?= /System/Library/Frameworks/vecLib.framework/Versions/Current/Headers/
LDFLAGS += -framework vecLib
endif
endif
endif
INCLUDE_DIRS += $(BLAS_INCLUDE)
LIBRARY_DIRS += $(BLAS_LIB)
LIBRARY_DIRS += $(LIB_BUILD_DIR)
# Automatic dependency generation (nvcc is handled separately)
CXXFLAGS += -MMD -MP
# Complete build flags.
COMMON_FLAGS += $(foreach includedir,$(INCLUDE_DIRS),-I$(includedir))
CXXFLAGS += -pthread -fPIC $(COMMON_FLAGS) $(WARNINGS)
NVCCFLAGS += -ccbin=$(CXX) -Xcompiler -fPIC $(COMMON_FLAGS)
NVCCFLAGS += -D_FORCE_INLINES -ccbin=$(CXX) -Xcompiler -fPIC $(COMMON_FLAGS)
# mex may invoke an older gcc that is too liberal with -Wuninitalized
MATLAB_CXXFLAGS := $(CXXFLAGS) -Wno-uninitialized
LINKFLAGS += -pthread -fPIC $(COMMON_FLAGS) $(WARNINGS)
USE_PKG_CONFIG ?= 0
ifeq ($(USE_PKG_CONFIG), 1)
PKG_CONFIG := $(shell pkg-config opencv --libs)
else
PKG_CONFIG :=
endif
LDFLAGS += $(foreach librarydir,$(LIBRARY_DIRS),-L$(librarydir)) $(PKG_CONFIG) \
$(foreach library,$(LIBRARIES),-l$(library))
PYTHON_LDFLAGS := $(LDFLAGS) $(foreach library,$(PYTHON_LIBRARIES),-l$(library))
# 'superclean' target recursively* deletes all files ending with an extension
# in $(SUPERCLEAN_EXTS) below. This may be useful if you've built older
# versions of Caffe that do not place all generated files in a location known
# to the 'clean' target.
#
# 'supercleanlist' will list the files to be deleted by make superclean.
#
# * Recursive with the exception that symbolic links are never followed, per the
# default behavior of 'find'.
SUPERCLEAN_EXTS := .so .a .o .bin .testbin .pb.cc .pb.h _pb2.py .cuo
# Set the sub-targets of the 'everything' target.
EVERYTHING_TARGETS := all py$(PROJECT) test warn lint
# Only build matcaffe as part of "everything" if MATLAB_DIR is specified.
ifneq ($(MATLAB_DIR),)
EVERYTHING_TARGETS += mat$(PROJECT)
endif
##############################
# Define build targets
##############################
.PHONY: all lib test clean docs linecount lint lintclean tools examples $(DIST_ALIASES) \
py mat py$(PROJECT) mat$(PROJECT) proto runtest \
superclean supercleanlist supercleanfiles warn everything
all: lib tools examples
lib: $(STATIC_NAME) $(DYNAMIC_NAME)
everything: $(EVERYTHING_TARGETS)
linecount:
cloc --read-lang-def=$(PROJECT).cloc \
src/$(PROJECT) include/$(PROJECT) tools examples \
python matlab
lint: $(EMPTY_LINT_REPORT)
lintclean:
@ $(RM) -r $(LINT_OUTPUT_DIR) $(EMPTY_LINT_REPORT) $(NONEMPTY_LINT_REPORT)
docs: $(DOXYGEN_OUTPUT_DIR)
@ cd ./docs ; ln -sfn ../$(DOXYGEN_OUTPUT_DIR)/html doxygen
$(DOXYGEN_OUTPUT_DIR): $(DOXYGEN_CONFIG_FILE) $(DOXYGEN_SOURCES)
$(DOXYGEN_COMMAND) $(DOXYGEN_CONFIG_FILE)
$(EMPTY_LINT_REPORT): $(LINT_OUTPUTS) | $(BUILD_DIR)
@ cat $(LINT_OUTPUTS) > $@
@ if [ -s "$@" ]; then \
cat $@; \
mv $@ $(NONEMPTY_LINT_REPORT); \
echo "Found one or more lint errors."; \
exit 1; \
fi; \
$(RM) $(NONEMPTY_LINT_REPORT); \
echo "No lint errors!";
$(LINT_OUTPUTS): $(LINT_OUTPUT_DIR)/%.lint.txt : % $(LINT_SCRIPT) | $(LINT_OUTPUT_DIR)
@ mkdir -p $(dir $@)
@ python $(LINT_SCRIPT) $< 2>&1 \
| grep -v "^Done processing " \
| grep -v "^Total errors found: 0" \
> $@ \
|| true
test: $(TEST_ALL_BIN) $(TEST_ALL_DYNLINK_BIN) $(TEST_BINS)
tools: $(TOOL_BINS) $(TOOL_BIN_LINKS)
examples: $(EXAMPLE_BINS)
py$(PROJECT): py
py: $(PY$(PROJECT)_SO) $(PROTO_GEN_PY)
$(PY$(PROJECT)_SO): $(PY$(PROJECT)_SRC) $(PY$(PROJECT)_HXX) | $(DYNAMIC_NAME)
@ echo CXX/LD -o $@ $<
$(Q)$(CXX) -shared -o $@ $(PY$(PROJECT)_SRC) \
-o $@ $(LINKFLAGS) -l$(LIBRARY_NAME) $(PYTHON_LDFLAGS) \
-Wl,-rpath,$(ORIGIN)/../../build/lib
mat$(PROJECT): mat
mat: $(MAT$(PROJECT)_SO)
$(MAT$(PROJECT)_SO): $(MAT$(PROJECT)_SRC) $(STATIC_NAME)
@ if [ -z "$(MATLAB_DIR)" ]; then \
echo "MATLAB_DIR must be specified in $(CONFIG_FILE)" \
"to build mat$(PROJECT)."; \
exit 1; \
fi
@ echo MEX $<
$(Q)$(MATLAB_DIR)/bin/mex $(MAT$(PROJECT)_SRC) \
CXX="$(CXX)" \
CXXFLAGS="\$$CXXFLAGS $(MATLAB_CXXFLAGS)" \
CXXLIBS="\$$CXXLIBS $(STATIC_LINK_COMMAND) $(LDFLAGS)" -output $@
@ if [ -f "$(PROJECT)_.d" ]; then \
mv -f $(PROJECT)_.d $(BUILD_DIR)/${MAT$(PROJECT)_SO:.$(MAT_SO_EXT)=.d}; \
fi
runtest: $(TEST_ALL_BIN)
$(TOOL_BUILD_DIR)/caffe
$(TEST_ALL_BIN) $(TEST_GPUID) --gtest_shuffle $(TEST_FILTER)
pytest: py
cd python; python -m unittest discover -s caffe/test
mattest: mat
cd matlab; $(MATLAB_DIR)/bin/matlab -nodisplay -r 'caffe.run_tests(), exit()'
warn: $(EMPTY_WARN_REPORT)
$(EMPTY_WARN_REPORT): $(ALL_WARNS) | $(BUILD_DIR)
@ cat $(ALL_WARNS) > $@
@ if [ -s "$@" ]; then \
cat $@; \
mv $@ $(NONEMPTY_WARN_REPORT); \
echo "Compiler produced one or more warnings."; \
exit 1; \
fi; \
$(RM) $(NONEMPTY_WARN_REPORT); \
echo "No compiler warnings!";
$(ALL_WARNS): %.o.$(WARNS_EXT) : %.o
$(BUILD_DIR_LINK): $(BUILD_DIR)/.linked
# Create a target ".linked" in this BUILD_DIR to tell Make that the "build" link
# is currently correct, then delete the one in the OTHER_BUILD_DIR in case it
# exists and $(DEBUG) is toggled later.
$(BUILD_DIR)/.linked:
@ mkdir -p $(BUILD_DIR)
@ $(RM) $(OTHER_BUILD_DIR)/.linked
@ $(RM) -r $(BUILD_DIR_LINK)
@ ln -s $(BUILD_DIR) $(BUILD_DIR_LINK)
@ touch $@
$(ALL_BUILD_DIRS): | $(BUILD_DIR_LINK)
@ mkdir -p $@
$(DYNAMIC_NAME): $(OBJS) | $(LIB_BUILD_DIR)
@ echo LD -o $@
$(Q)$(CXX) -shared -o $@ $(OBJS) $(VERSIONFLAGS) $(LINKFLAGS) $(LDFLAGS)
@ cd $(BUILD_DIR)/lib; rm -f $(DYNAMIC_NAME_SHORT); ln -s $(DYNAMIC_VERSIONED_NAME_SHORT) $(DYNAMIC_NAME_SHORT)
$(STATIC_NAME): $(OBJS) | $(LIB_BUILD_DIR)
@ echo AR -o $@
$(Q)ar rcs $@ $(OBJS)
$(BUILD_DIR)/%.o: %.cpp $(PROTO_GEN_HEADER) | $(ALL_BUILD_DIRS)
@ echo CXX $<
$(Q)$(CXX) $< $(CXXFLAGS) -c -o $@ 2> $@.$(WARNS_EXT) \
|| (cat $@.$(WARNS_EXT); exit 1)
@ cat $@.$(WARNS_EXT)
$(PROTO_BUILD_DIR)/%.pb.o: $(PROTO_BUILD_DIR)/%.pb.cc $(PROTO_GEN_HEADER) \
| $(PROTO_BUILD_DIR)
@ echo CXX $<
$(Q)$(CXX) $< $(CXXFLAGS) -c -o $@ 2> $@.$(WARNS_EXT) \
|| (cat $@.$(WARNS_EXT); exit 1)
@ cat $@.$(WARNS_EXT)
$(BUILD_DIR)/cuda/%.o: %.cu | $(ALL_BUILD_DIRS)
@ echo NVCC $<
$(Q)$(CUDA_DIR)/bin/nvcc $(NVCCFLAGS) $(CUDA_ARCH) -M $< -o ${@:.o=.d} \
-odir $(@D)
$(Q)$(CUDA_DIR)/bin/nvcc $(NVCCFLAGS) $(CUDA_ARCH) -c $< -o $@ 2> $@.$(WARNS_EXT) \
|| (cat $@.$(WARNS_EXT); exit 1)
@ cat $@.$(WARNS_EXT)
$(TEST_ALL_BIN): $(TEST_MAIN_SRC) $(TEST_OBJS) $(GTEST_OBJ) \
| $(DYNAMIC_NAME) $(TEST_BIN_DIR)
@ echo CXX/LD -o $@ $<
$(Q)$(CXX) $(TEST_MAIN_SRC) $(TEST_OBJS) $(GTEST_OBJ) \
-o $@ $(LINKFLAGS) $(LDFLAGS) -l$(LIBRARY_NAME) -Wl,-rpath,$(ORIGIN)/../lib
$(TEST_CU_BINS): $(TEST_BIN_DIR)/%.testbin: $(TEST_CU_BUILD_DIR)/%.o \
$(GTEST_OBJ) | $(DYNAMIC_NAME) $(TEST_BIN_DIR)
@ echo LD $<
$(Q)$(CXX) $(TEST_MAIN_SRC) $< $(GTEST_OBJ) \
-o $@ $(LINKFLAGS) $(LDFLAGS) -l$(LIBRARY_NAME) -Wl,-rpath,$(ORIGIN)/../lib
$(TEST_CXX_BINS): $(TEST_BIN_DIR)/%.testbin: $(TEST_CXX_BUILD_DIR)/%.o \
$(GTEST_OBJ) | $(DYNAMIC_NAME) $(TEST_BIN_DIR)
@ echo LD $<
$(Q)$(CXX) $(TEST_MAIN_SRC) $< $(GTEST_OBJ) \
-o $@ $(LINKFLAGS) $(LDFLAGS) -l$(LIBRARY_NAME) -Wl,-rpath,$(ORIGIN)/../lib
# Target for extension-less symlinks to tool binaries with extension '*.bin'.
$(TOOL_BUILD_DIR)/%: $(TOOL_BUILD_DIR)/%.bin | $(TOOL_BUILD_DIR)
@ $(RM) $@
@ ln -s $(notdir $<) $@
$(TOOL_BINS): %.bin : %.o | $(DYNAMIC_NAME)
@ echo CXX/LD -o $@
$(Q)$(CXX) $< -o $@ $(LINKFLAGS) -l$(LIBRARY_NAME) $(LDFLAGS) \
-Wl,-rpath,$(ORIGIN)/../lib
$(EXAMPLE_BINS): %.bin : %.o | $(DYNAMIC_NAME)
@ echo CXX/LD -o $@
$(Q)$(CXX) $< -o $@ $(LINKFLAGS) -l$(LIBRARY_NAME) $(LDFLAGS) \
-Wl,-rpath,$(ORIGIN)/../../lib
proto: $(PROTO_GEN_CC) $(PROTO_GEN_HEADER)
$(PROTO_BUILD_DIR)/%.pb.cc $(PROTO_BUILD_DIR)/%.pb.h : \
$(PROTO_SRC_DIR)/%.proto | $(PROTO_BUILD_DIR)
@ echo PROTOC $<
$(Q)protoc --proto_path=$(PROTO_SRC_DIR) --cpp_out=$(PROTO_BUILD_DIR) $<
$(PY_PROTO_BUILD_DIR)/%_pb2.py : $(PROTO_SRC_DIR)/%.proto \
$(PY_PROTO_INIT) | $(PY_PROTO_BUILD_DIR)
@ echo PROTOC \(python\) $<
$(Q)protoc --proto_path=src --python_out=python $<
$(PY_PROTO_INIT): | $(PY_PROTO_BUILD_DIR)
touch $(PY_PROTO_INIT)
clean:
@- $(RM) -rf $(ALL_BUILD_DIRS)
@- $(RM) -rf $(OTHER_BUILD_DIR)
@- $(RM) -rf $(BUILD_DIR_LINK)
@- $(RM) -rf $(DISTRIBUTE_DIR)
@- $(RM) $(PY$(PROJECT)_SO)
@- $(RM) $(MAT$(PROJECT)_SO)
supercleanfiles:
$(eval SUPERCLEAN_FILES := $(strip \
$(foreach ext,$(SUPERCLEAN_EXTS), $(shell find . -name '*$(ext)' \
-not -path './data/*'))))
supercleanlist: supercleanfiles
@ \
if [ -z "$(SUPERCLEAN_FILES)" ]; then \
echo "No generated files found."; \
else \
echo $(SUPERCLEAN_FILES) | tr ' ' '\n'; \
fi
superclean: clean supercleanfiles
@ \
if [ -z "$(SUPERCLEAN_FILES)" ]; then \
echo "No generated files found."; \
else \
echo "Deleting the following generated files:"; \
echo $(SUPERCLEAN_FILES) | tr ' ' '\n'; \
$(RM) $(SUPERCLEAN_FILES); \
fi
$(DIST_ALIASES): $(DISTRIBUTE_DIR)
$(DISTRIBUTE_DIR): all py | $(DISTRIBUTE_SUBDIRS)
# add proto
cp -r src/caffe/proto $(DISTRIBUTE_DIR)/
# add include
cp -r include $(DISTRIBUTE_DIR)/
mkdir -p $(DISTRIBUTE_DIR)/include/caffe/proto
cp $(PROTO_GEN_HEADER_SRCS) $(DISTRIBUTE_DIR)/include/caffe/proto
# add tool and example binaries
cp $(TOOL_BINS) $(DISTRIBUTE_DIR)/bin
cp $(EXAMPLE_BINS) $(DISTRIBUTE_DIR)/bin
# add libraries
cp $(STATIC_NAME) $(DISTRIBUTE_DIR)/lib
install -m 644 $(DYNAMIC_NAME) $(DISTRIBUTE_DIR)/lib
cd $(DISTRIBUTE_DIR)/lib; rm -f $(DYNAMIC_NAME_SHORT); ln -s $(DYNAMIC_VERSIONED_NAME_SHORT) $(DYNAMIC_NAME_SHORT)
# add python - it's not the standard way, indeed...
cp -r python $(DISTRIBUTE_DIR)/
-include $(DEPS)
cd python/
使用阿里云镜像安装依赖库:
for req in $(cat requirements.txt); do pip3 install $req -i https://mirrors.aliyun.com/pypi/simple/; done
cd .. && sudo make clean
sudo make all -j$(nproc)
由于caffe最后支持的版本是cuDNN7.6.5,为了能在cuDNN8的环境下编译通过,需要修改两个cpp文件,路径为/caffe/src/caffe/layers下的cudnn_conv_layer.cpp和cudnn_deconv_layer.cpp两个文件,分别将他们内容替换为:
/**
* @File Name : cudnn_conv_layer.cpp
*/
#ifdef USE_CUDNN
#include <algorithm>
#include <vector>
#include "caffe/layers/cudnn_conv_layer.hpp"
namespace caffe
{
// Set to three for the benefit of the backward pass, which
// can use separate streams for calculating the gradient w.r.t.
// bias, filter weights, and bottom data for each group independently
#define CUDNN_STREAMS_PER_GROUP 3
/**
* TODO(dox) explain cuDNN interface
*/
template <typename Dtype>
void CuDNNConvolutionLayer<Dtype>::LayerSetUp(
const vector<Blob<Dtype> *> &bottom, const vector<Blob<Dtype> *> &top)
{
ConvolutionLayer<Dtype>::LayerSetUp(bottom, top);
// Initialize CUDA streams and cuDNN.
stream_ = new cudaStream_t[this->group_ * CUDNN_STREAMS_PER_GROUP];
handle_ = new cudnnHandle_t[this->group_ * CUDNN_STREAMS_PER_GROUP];
// Initialize algorithm arrays
fwd_algo_ = new cudnnConvolutionFwdAlgo_t[bottom.size()];
bwd_filter_algo_ = new cudnnConvolutionBwdFilterAlgo_t[bottom.size()];
bwd_data_algo_ = new cudnnConvolutionBwdDataAlgo_t[bottom.size()];
// initialize size arrays
workspace_fwd_sizes_ = new size_t[bottom.size()];
workspace_bwd_filter_sizes_ = new size_t[bottom.size()];
workspace_bwd_data_sizes_ = new size_t[bottom.size()];
// workspace data
workspaceSizeInBytes = 0;
workspaceData = NULL;
workspace = new void *[this->group_ * CUDNN_STREAMS_PER_GROUP];
for (size_t i = 0; i < bottom.size(); ++i)
{
// initialize all to default algorithms
fwd_algo_[i] = (cudnnConvolutionFwdAlgo_t)0;
bwd_filter_algo_[i] = (cudnnConvolutionBwdFilterAlgo_t)0;
bwd_data_algo_[i] = (cudnnConvolutionBwdDataAlgo_t)0;
// default algorithms don't require workspace
workspace_fwd_sizes_[i] = 0;
workspace_bwd_data_sizes_[i] = 0;
workspace_bwd_filter_sizes_[i] = 0;
}
for (int g = 0; g < this->group_ * CUDNN_STREAMS_PER_GROUP; g++)
{
CUDA_CHECK(cudaStreamCreate(&stream_[g]));
CUDNN_CHECK(cudnnCreate(&handle_[g]));
CUDNN_CHECK(cudnnSetStream(handle_[g], stream_[g]));
workspace[g] = NULL;
}
// Set the indexing parameters.
bias_offset_ = (this->num_output_ / this->group_);
// Create filter descriptor.
const int *kernel_shape_data = this->kernel_shape_.cpu_data();
const int kernel_h = kernel_shape_data[0];
const int kernel_w = kernel_shape_data[1];
cudnn::createFilterDesc<Dtype>(&filter_desc_,
this->num_output_ / this->group_, this->channels_ / this->group_,
kernel_h, kernel_w);
// Create tensor descriptor(s) for data and corresponding convolution(s).
for (int i = 0; i < bottom.size(); i++)
{
cudnnTensorDescriptor_t bottom_desc;
cudnn::createTensor4dDesc<Dtype>(&bottom_desc);
bottom_descs_.push_back(bottom_desc);
cudnnTensorDescriptor_t top_desc;
cudnn::createTensor4dDesc<Dtype>(&top_desc);
top_descs_.push_back(top_desc);
cudnnConvolutionDescriptor_t conv_desc;
cudnn::createConvolutionDesc<Dtype>(&conv_desc);
conv_descs_.push_back(conv_desc);
}
// Tensor descriptor for bias.
if (this->bias_term_)
{
cudnn::createTensor4dDesc<Dtype>(&bias_desc_);
}
handles_setup_ = true;
}
template <typename Dtype>
void CuDNNConvolutionLayer<Dtype>::Reshape(
const vector<Blob<Dtype> *> &bottom, const vector<Blob<Dtype> *> &top)
{
ConvolutionLayer<Dtype>::Reshape(bottom, top);
CHECK_EQ(2, this->num_spatial_axes_)
<< "CuDNNConvolution input must have 2 spatial axes "
<< "(e.g., height and width). "
<< "Use 'engine: CAFFE' for general ND convolution.";
bottom_offset_ = this->bottom_dim_ / this->group_;
top_offset_ = this->top_dim_ / this->group_;
const int height = bottom[0]->shape(this->channel_axis_ + 1);
const int width = bottom[0]->shape(this->channel_axis_ + 2);
const int height_out = top[0]->shape(this->channel_axis_ + 1);
const int width_out = top[0]->shape(this->channel_axis_ + 2);
const int *pad_data = this->pad_.cpu_data();
const int pad_h = pad_data[0];
const int pad_w = pad_data[1];
const int *stride_data = this->stride_.cpu_data();
const int stride_h = stride_data[0];
const int stride_w = stride_data[1];
#if CUDNN_VERSION_MIN(8, 0, 0)
int RetCnt;
bool found_conv_algorithm;
size_t free_memory, total_memory;
cudnnConvolutionFwdAlgoPerf_t fwd_algo_pref_[4];
cudnnConvolutionBwdDataAlgoPerf_t bwd_data_algo_pref_[4];
// get memory sizes
cudaMemGetInfo(&free_memory, &total_memory);
#else
// Specify workspace limit for kernels directly until we have a
// planning strategy and a rewrite of Caffe's GPU memory mangagement
size_t workspace_limit_bytes = 8 * 1024 * 1024;
#endif
for (int i = 0; i < bottom.size(); i++)
{
cudnn::setTensor4dDesc<Dtype>(&bottom_descs_[i],
this->num_,
this->channels_ / this->group_, height, width,
this->channels_ * height * width,
height * width, width, 1);
cudnn::setTensor4dDesc<Dtype>(&top_descs_[i],
this->num_,
this->num_output_ / this->group_, height_out, width_out,
this->num_output_ * this->out_spatial_dim_,
this->out_spatial_dim_, width_out, 1);
cudnn::setConvolutionDesc<Dtype>(&conv_descs_[i], bottom_descs_[i],
filter_desc_, pad_h, pad_w,
stride_h, stride_w);
#if CUDNN_VERSION_MIN(8, 0, 0)
// choose forward algorithm for filter
// in forward filter the CUDNN_CONVOLUTION_FWD_ALGO_WINOGRAD_NONFUSED is not implemented in cuDNN 8
CUDNN_CHECK(cudnnGetConvolutionForwardAlgorithm_v7(handle_[0],
bottom_descs_[i],
filter_desc_,
conv_descs_[i],
top_descs_[i],
4,
&RetCnt,
fwd_algo_pref_));
found_conv_algorithm = false;
for (int n = 0; n < RetCnt; n++)
{
if (fwd_algo_pref_[n].status == CUDNN_STATUS_SUCCESS &&
fwd_algo_pref_[n].algo != CUDNN_CONVOLUTION_FWD_ALGO_WINOGRAD_NONFUSED &&
fwd_algo_pref_[n].memory < free_memory)
{
found_conv_algorithm = true;
fwd_algo_[i] = fwd_algo_pref_[n].algo;
workspace_fwd_sizes_[i] = fwd_algo_pref_[n].memory;
break;
}
}
if (!found_conv_algorithm)
LOG(ERROR) << "cuDNN did not return a suitable algorithm for convolution.";
else
{
// choose backward algorithm for filter
// for better or worse, just a fixed constant due to the missing
// cudnnGetConvolutionBackwardFilterAlgorithm in cuDNN version 8.0
bwd_filter_algo_[i] = CUDNN_CONVOLUTION_BWD_FILTER_ALGO_0;
// twice the amount of the forward search to be save
workspace_bwd_filter_sizes_[i] = 2 * workspace_fwd_sizes_[i];
}
// choose backward algo for data
CUDNN_CHECK(cudnnGetConvolutionBackwardDataAlgorithm_v7(handle_[0],
filter_desc_,
top_descs_[i],
conv_descs_[i],
bottom_descs_[i],
4,
&RetCnt,
bwd_data_algo_pref_));
found_conv_algorithm = false;
for (int n = 0; n < RetCnt; n++)
{
if (bwd_data_algo_pref_[n].status == CUDNN_STATUS_SUCCESS &&
bwd_data_algo_pref_[n].algo != CUDNN_CONVOLUTION_BWD_DATA_ALGO_WINOGRAD &&
bwd_data_algo_pref_[n].algo != CUDNN_CONVOLUTION_BWD_DATA_ALGO_WINOGRAD_NONFUSED &&
bwd_data_algo_pref_[n].memory < free_memory)
{
found_conv_algorithm = true;
bwd_data_algo_[i] = bwd_data_algo_pref_[n].algo;
workspace_bwd_data_sizes_[i] = bwd_data_algo_pref_[n].memory;
break;
}
}
if (!found_conv_algorithm)
LOG(ERROR) << "cuDNN did not return a suitable algorithm for convolution.";
#else
// choose forward and backward algorithms + workspace(s)
CUDNN_CHECK(cudnnGetConvolutionForwardAlgorithm(handle_[0],
bottom_descs_[i],
filter_desc_,
conv_descs_[i],
top_descs_[i],
CUDNN_CONVOLUTION_FWD_SPECIFY_WORKSPACE_LIMIT,
workspace_limit_bytes,
&fwd_algo_[i]));
CUDNN_CHECK(cudnnGetConvolutionForwardWorkspaceSize(handle_[0],
bottom_descs_[i],
filter_desc_,
conv_descs_[i],
top_descs_[i],
fwd_algo_[i],
&(workspace_fwd_sizes_[i])));
// choose backward algorithm for filter
CUDNN_CHECK(cudnnGetConvolutionBackwardFilterAlgorithm(handle_[0],
bottom_descs_[i], top_descs_[i], conv_descs_[i], filter_desc_,
CUDNN_CONVOLUTION_BWD_FILTER_SPECIFY_WORKSPACE_LIMIT,
workspace_limit_bytes, &bwd_filter_algo_[i]));
// get workspace for backwards filter algorithm
CUDNN_CHECK(cudnnGetConvolutionBackwardFilterWorkspaceSize(handle_[0],
bottom_descs_[i], top_descs_[i], conv_descs_[i], filter_desc_,
bwd_filter_algo_[i], &workspace_bwd_filter_sizes_[i]));
// choose backward algo for data
CUDNN_CHECK(cudnnGetConvolutionBackwardDataAlgorithm(handle_[0],
filter_desc_, top_descs_[i], conv_descs_[i], bottom_descs_[i],
CUDNN_CONVOLUTION_BWD_DATA_SPECIFY_WORKSPACE_LIMIT,
workspace_limit_bytes, &bwd_data_algo_[i]));
// get workspace size
CUDNN_CHECK(cudnnGetConvolutionBackwardDataWorkspaceSize(handle_[0],
filter_desc_, top_descs_[i], conv_descs_[i], bottom_descs_[i],
bwd_data_algo_[i], &workspace_bwd_data_sizes_[i]));
#endif
}
// reduce over all workspace sizes to get a maximum to allocate / reallocate
size_t total_workspace_fwd = 0;
size_t total_workspace_bwd_data = 0;
size_t total_workspace_bwd_filter = 0;
for (size_t i = 0; i < bottom.size(); i++)
{
total_workspace_fwd = std::max(total_workspace_fwd,
workspace_fwd_sizes_[i]);
total_workspace_bwd_data = std::max(total_workspace_bwd_data,
workspace_bwd_data_sizes_[i]);
total_workspace_bwd_filter = std::max(total_workspace_bwd_filter,
workspace_bwd_filter_sizes_[i]);
}
// get max over all operations
size_t max_workspace = std::max(total_workspace_fwd,
total_workspace_bwd_data);
max_workspace = std::max(max_workspace, total_workspace_bwd_filter);
// ensure all groups have enough workspace
size_t total_max_workspace = max_workspace *
(this->group_ * CUDNN_STREAMS_PER_GROUP);
// this is the total amount of storage needed over all groups + streams
if (total_max_workspace > workspaceSizeInBytes)
{
DLOG(INFO) << "Reallocating workspace storage: " << total_max_workspace;
workspaceSizeInBytes = total_max_workspace;
// free the existing workspace and allocate a new (larger) one
cudaFree(this->workspaceData);
cudaError_t err = cudaMalloc(&(this->workspaceData), workspaceSizeInBytes);
if (err != cudaSuccess)
{
// force zero memory path
for (int i = 0; i < bottom.size(); i++)
{
workspace_fwd_sizes_[i] = 0;
workspace_bwd_filter_sizes_[i] = 0;
workspace_bwd_data_sizes_[i] = 0;
fwd_algo_[i] = CUDNN_CONVOLUTION_FWD_ALGO_IMPLICIT_GEMM;
bwd_filter_algo_[i] = CUDNN_CONVOLUTION_BWD_FILTER_ALGO_0;
bwd_data_algo_[i] = CUDNN_CONVOLUTION_BWD_DATA_ALGO_0;
}
// NULL out all workspace pointers
for (int g = 0; g < (this->group_ * CUDNN_STREAMS_PER_GROUP); g++)
{
workspace[g] = NULL;
}
// NULL out underlying data
workspaceData = NULL;
workspaceSizeInBytes = 0;
}
// if we succeed in the allocation, set pointer aliases for workspaces
for (int g = 0; g < (this->group_ * CUDNN_STREAMS_PER_GROUP); g++)
{
workspace[g] = reinterpret_cast<char *>(workspaceData) + g * max_workspace;
}
}
// Tensor descriptor for bias.
if (this->bias_term_)
{
cudnn::setTensor4dDesc<Dtype>(&bias_desc_,
1, this->num_output_ / this->group_, 1, 1);
}
}
template <typename Dtype>
CuDNNConvolutionLayer<Dtype>::~CuDNNConvolutionLayer()
{
// Check that handles have been setup before destroying.
if (!handles_setup_)
{
return;
}
for (int i = 0; i < bottom_descs_.size(); i++)
{
cudnnDestroyTensorDescriptor(bottom_descs_[i]);
cudnnDestroyTensorDescriptor(top_descs_[i]);
cudnnDestroyConvolutionDescriptor(conv_descs_[i]);
}
if (this->bias_term_)
{
cudnnDestroyTensorDescriptor(bias_desc_);
}
cudnnDestroyFilterDescriptor(filter_desc_);
for (int g = 0; g < this->group_ * CUDNN_STREAMS_PER_GROUP; g++)
{
cudaStreamDestroy(stream_[g]);
cudnnDestroy(handle_[g]);
}
cudaFree(workspaceData);
delete[] stream_;
delete[] handle_;
delete[] fwd_algo_;
delete[] bwd_filter_algo_;
delete[] bwd_data_algo_;
delete[] workspace_fwd_sizes_;
delete[] workspace_bwd_data_sizes_;
delete[] workspace_bwd_filter_sizes_;
}
INSTANTIATE_CLASS(CuDNNConvolutionLayer);
} // namespace caffe
#endif
/**
* @File Name : cudnn_deconv_layer.cpp
*/
#ifdef USE_CUDNN
#include <algorithm>
#include <vector>
#include "caffe/layers/cudnn_deconv_layer.hpp"
namespace caffe
{
// Set to three for the benefit of the backward pass, which
// can use separate streams for calculating the gradient w.r.t.
// bias, filter weights, and bottom data for each group independently
#define CUDNN_STREAMS_PER_GROUP 3
/**
* TODO(dox) explain cuDNN interface
*/
template <typename Dtype>
void CuDNNDeconvolutionLayer<Dtype>::LayerSetUp(
const vector<Blob<Dtype> *> &bottom, const vector<Blob<Dtype> *> &top)
{
DeconvolutionLayer<Dtype>::LayerSetUp(bottom, top);
// Initialize CUDA streams and cuDNN.
stream_ = new cudaStream_t[this->group_ * CUDNN_STREAMS_PER_GROUP];
handle_ = new cudnnHandle_t[this->group_ * CUDNN_STREAMS_PER_GROUP];
// Initialize algorithm arrays
fwd_algo_ = new cudnnConvolutionFwdAlgo_t[bottom.size()];
bwd_filter_algo_ = new cudnnConvolutionBwdFilterAlgo_t[bottom.size()];
bwd_data_algo_ = new cudnnConvolutionBwdDataAlgo_t[bottom.size()];
// initialize size arrays
workspace_fwd_sizes_ = new size_t[bottom.size()];
workspace_bwd_filter_sizes_ = new size_t[bottom.size()];
workspace_bwd_data_sizes_ = new size_t[bottom.size()];
// workspace data
workspaceSizeInBytes = 0;
workspaceData = NULL;
workspace = new void *[this->group_ * CUDNN_STREAMS_PER_GROUP];
for (size_t i = 0; i < bottom.size(); ++i)
{
// initialize all to default algorithms
fwd_algo_[i] = (cudnnConvolutionFwdAlgo_t)0;
bwd_filter_algo_[i] = (cudnnConvolutionBwdFilterAlgo_t)0;
bwd_data_algo_[i] = (cudnnConvolutionBwdDataAlgo_t)0;
// default algorithms don't require workspace
workspace_fwd_sizes_[i] = 0;
workspace_bwd_data_sizes_[i] = 0;
workspace_bwd_filter_sizes_[i] = 0;
}
for (int g = 0; g < this->group_ * CUDNN_STREAMS_PER_GROUP; g++)
{
CUDA_CHECK(cudaStreamCreate(&stream_[g]));
CUDNN_CHECK(cudnnCreate(&handle_[g]));
CUDNN_CHECK(cudnnSetStream(handle_[g], stream_[g]));
workspace[g] = NULL;
}
// Set the indexing parameters.
bias_offset_ = (this->num_output_ / this->group_);
// Create filter descriptor.
const int *kernel_shape_data = this->kernel_shape_.cpu_data();
const int kernel_h = kernel_shape_data[0];
const int kernel_w = kernel_shape_data[1];
cudnn::createFilterDesc<Dtype>(&filter_desc_,
this->channels_ / this->group_,
this->num_output_ / this->group_,
kernel_h,
kernel_w);
// Create tensor descriptor(s) for data and corresponding convolution(s).
for (int i = 0; i < bottom.size(); i++)
{
cudnnTensorDescriptor_t bottom_desc;
cudnn::createTensor4dDesc<Dtype>(&bottom_desc);
bottom_descs_.push_back(bottom_desc);
cudnnTensorDescriptor_t top_desc;
cudnn::createTensor4dDesc<Dtype>(&top_desc);
top_descs_.push_back(top_desc);
cudnnConvolutionDescriptor_t conv_desc;
cudnn::createConvolutionDesc<Dtype>(&conv_desc);
conv_descs_.push_back(conv_desc);
}
// Tensor descriptor for bias.
if (this->bias_term_)
{
cudnn::createTensor4dDesc<Dtype>(&bias_desc_);
}
handles_setup_ = true;
}
template <typename Dtype>
void CuDNNDeconvolutionLayer<Dtype>::Reshape(
const vector<Blob<Dtype> *> &bottom, const vector<Blob<Dtype> *> &top)
{
DeconvolutionLayer<Dtype>::Reshape(bottom, top);
CHECK_EQ(2, this->num_spatial_axes_)
<< "CuDNNDeconvolutionLayer input must have 2 spatial axes "
<< "(e.g., height and width). "
<< "Use 'engine: CAFFE' for general ND convolution.";
bottom_offset_ = this->bottom_dim_ / this->group_;
top_offset_ = this->top_dim_ / this->group_;
const int height = bottom[0]->shape(this->channel_axis_ + 1);
const int width = bottom[0]->shape(this->channel_axis_ + 2);
const int height_out = top[0]->shape(this->channel_axis_ + 1);
const int width_out = top[0]->shape(this->channel_axis_ + 2);
const int *pad_data = this->pad_.cpu_data();
const int pad_h = pad_data[0];
const int pad_w = pad_data[1];
const int *stride_data = this->stride_.cpu_data();
const int stride_h = stride_data[0];
const int stride_w = stride_data[1];
#if CUDNN_VERSION_MIN(8, 0, 0)
int RetCnt;
bool found_conv_algorithm;
size_t free_memory, total_memory;
cudnnConvolutionFwdAlgoPerf_t fwd_algo_pref_[4];
cudnnConvolutionBwdDataAlgoPerf_t bwd_data_algo_pref_[4];
// get memory sizes
cudaMemGetInfo(&free_memory, &total_memory);
#else
// Specify workspace limit for kernels directly until we have a
// planning strategy and a rewrite of Caffe's GPU memory mangagement
size_t workspace_limit_bytes = 8 * 1024 * 1024;
#endif
for (int i = 0; i < bottom.size(); i++)
{
cudnn::setTensor4dDesc<Dtype>(&bottom_descs_[i],
this->num_,
this->channels_ / this->group_,
height,
width,
this->channels_ * height * width,
height * width,
width,
1);
cudnn::setTensor4dDesc<Dtype>(&top_descs_[i],
this->num_,
this->num_output_ / this->group_,
height_out,
width_out,
this->num_output_ * height_out * width_out,
height_out * width_out,
width_out,
1);
cudnn::setConvolutionDesc<Dtype>(&conv_descs_[i],
top_descs_[i],
filter_desc_,
pad_h,
pad_w,
stride_h,
stride_w);
#if CUDNN_VERSION_MIN(8, 0, 0)
// choose forward algorithm for filter
// in forward filter the CUDNN_CONVOLUTION_FWD_ALGO_WINOGRAD_NONFUSED is not implemented in cuDNN 8
CUDNN_CHECK(cudnnGetConvolutionForwardAlgorithm_v7(handle_[0],
top_descs_[i],
filter_desc_,
conv_descs_[i],
bottom_descs_[i],
4,
&RetCnt,
fwd_algo_pref_));
found_conv_algorithm = false;
for (int n = 0; n < RetCnt; n++)
{
if (fwd_algo_pref_[n].status == CUDNN_STATUS_SUCCESS &&
fwd_algo_pref_[n].algo != CUDNN_CONVOLUTION_FWD_ALGO_WINOGRAD_NONFUSED &&
fwd_algo_pref_[n].memory < free_memory)
{
found_conv_algorithm = true;
fwd_algo_[i] = fwd_algo_pref_[n].algo;
workspace_fwd_sizes_[i] = fwd_algo_pref_[n].memory;
break;
}
}
if (!found_conv_algorithm)
LOG(ERROR) << "cuDNN did not return a suitable algorithm for convolution.";
else
{
// choose backward algorithm for filter
// for better or worse, just a fixed constant due to the missing
// cudnnGetConvolutionBackwardFilterAlgorithm in cuDNN version 8.0
bwd_filter_algo_[i] = CUDNN_CONVOLUTION_BWD_FILTER_ALGO_0;
// twice the amount of the forward search to be save
workspace_bwd_filter_sizes_[i] = 2 * workspace_fwd_sizes_[i];
}
// choose backward algo for data
CUDNN_CHECK(cudnnGetConvolutionBackwardDataAlgorithm_v7(handle_[0],
filter_desc_,
bottom_descs_[i],
conv_descs_[i],
top_descs_[i],
4,
&RetCnt,
bwd_data_algo_pref_));
found_conv_algorithm = false;
for (int n = 0; n < RetCnt; n++)
{
if (bwd_data_algo_pref_[n].status == CUDNN_STATUS_SUCCESS &&
bwd_data_algo_pref_[n].algo != CUDNN_CONVOLUTION_BWD_DATA_ALGO_WINOGRAD &&
bwd_data_algo_pref_[n].algo != CUDNN_CONVOLUTION_BWD_DATA_ALGO_WINOGRAD_NONFUSED &&
bwd_data_algo_pref_[n].memory < free_memory)
{
found_conv_algorithm = true;
bwd_data_algo_[i] = bwd_data_algo_pref_[n].algo;
workspace_bwd_data_sizes_[i] = bwd_data_algo_pref_[n].memory;
break;
}
}
if (!found_conv_algorithm)
LOG(ERROR) << "cuDNN did not return a suitable algorithm for convolution.";
#else
// choose forward and backward algorithms + workspace(s)
CUDNN_CHECK(cudnnGetConvolutionForwardAlgorithm(
handle_[0],
top_descs_[i],
filter_desc_,
conv_descs_[i],
bottom_descs_[i],
CUDNN_CONVOLUTION_FWD_SPECIFY_WORKSPACE_LIMIT,
workspace_limit_bytes,
&fwd_algo_[i]));
// We have found that CUDNN_CONVOLUTION_FWD_ALGO_IMPLICIT_PRECOMP_GEMM is
// buggy. Thus, if this algo was chosen, choose winograd instead. If
// winograd is not supported or workspace is larger than threshold, choose
// implicit_gemm instead.
if (fwd_algo_[i] == CUDNN_CONVOLUTION_FWD_ALGO_IMPLICIT_PRECOMP_GEMM)
{
size_t winograd_workspace_size;
cudnnStatus_t status = cudnnGetConvolutionForwardWorkspaceSize(
handle_[0],
top_descs_[i],
filter_desc_,
conv_descs_[i],
bottom_descs_[i],
CUDNN_CONVOLUTION_FWD_ALGO_WINOGRAD,
&winograd_workspace_size);
if (status != CUDNN_STATUS_SUCCESS ||
winograd_workspace_size >= workspace_limit_bytes)
{
fwd_algo_[i] = CUDNN_CONVOLUTION_FWD_ALGO_IMPLICIT_GEMM;
}
else
{
fwd_algo_[i] = CUDNN_CONVOLUTION_FWD_ALGO_WINOGRAD;
}
}
CUDNN_CHECK(cudnnGetConvolutionForwardWorkspaceSize(
handle_[0],
top_descs_[i],
filter_desc_,
conv_descs_[i],
bottom_descs_[i],
fwd_algo_[i],
&(workspace_fwd_sizes_[i])));
// choose backward algorithm for filter
CUDNN_CHECK(cudnnGetConvolutionBackwardFilterAlgorithm(
handle_[0],
top_descs_[i],
bottom_descs_[i],
conv_descs_[i],
filter_desc_,
CUDNN_CONVOLUTION_BWD_FILTER_SPECIFY_WORKSPACE_LIMIT,
workspace_limit_bytes,
&bwd_filter_algo_[i]));
// get workspace for backwards filter algorithm
CUDNN_CHECK(cudnnGetConvolutionBackwardFilterWorkspaceSize(
handle_[0],
top_descs_[i],
bottom_descs_[i],
conv_descs_[i],
filter_desc_,
bwd_filter_algo_[i],
&workspace_bwd_filter_sizes_[i]));
// choose backward algo for data
CUDNN_CHECK(cudnnGetConvolutionBackwardDataAlgorithm(
handle_[0],
filter_desc_,
bottom_descs_[i],
conv_descs_[i],
top_descs_[i],
CUDNN_CONVOLUTION_BWD_DATA_SPECIFY_WORKSPACE_LIMIT,
workspace_limit_bytes,
&bwd_data_algo_[i]));
// get workspace size
CUDNN_CHECK(cudnnGetConvolutionBackwardDataWorkspaceSize(
handle_[0],
filter_desc_,
bottom_descs_[i],
conv_descs_[i],
top_descs_[i],
bwd_data_algo_[i],
&workspace_bwd_data_sizes_[i]));
#endif
}
// reduce over all workspace sizes to get a maximum to allocate / reallocate
size_t total_workspace_fwd = 0;
size_t total_workspace_bwd_data = 0;
size_t total_workspace_bwd_filter = 0;
for (size_t i = 0; i < bottom.size(); i++)
{
total_workspace_fwd = std::max(total_workspace_fwd,
workspace_fwd_sizes_[i]);
total_workspace_bwd_data = std::max(total_workspace_bwd_data,
workspace_bwd_data_sizes_[i]);
total_workspace_bwd_filter = std::max(total_workspace_bwd_filter,
workspace_bwd_filter_sizes_[i]);
}
// get max over all operations
size_t max_workspace = std::max(total_workspace_fwd,
total_workspace_bwd_data);
max_workspace = std::max(max_workspace, total_workspace_bwd_filter);
// ensure all groups have enough workspace
size_t total_max_workspace = max_workspace *
(this->group_ * CUDNN_STREAMS_PER_GROUP);
// this is the total amount of storage needed over all groups + streams
if (total_max_workspace > workspaceSizeInBytes)
{
DLOG(INFO) << "Reallocating workspace storage: " << total_max_workspace;
workspaceSizeInBytes = total_max_workspace;
// free the existing workspace and allocate a new (larger) one
cudaFree(this->workspaceData);
cudaError_t err = cudaMalloc(&(this->workspaceData), workspaceSizeInBytes);
if (err != cudaSuccess)
{
// force zero memory path
for (int i = 0; i < bottom.size(); i++)
{
workspace_fwd_sizes_[i] = 0;
workspace_bwd_filter_sizes_[i] = 0;
workspace_bwd_data_sizes_[i] = 0;
fwd_algo_[i] = CUDNN_CONVOLUTION_FWD_ALGO_FFT_TILING;
bwd_filter_algo_[i] = CUDNN_CONVOLUTION_BWD_FILTER_ALGO_0;
bwd_data_algo_[i] = CUDNN_CONVOLUTION_BWD_DATA_ALGO_0;
}
// NULL out all workspace pointers
for (int g = 0; g < (this->group_ * CUDNN_STREAMS_PER_GROUP); g++)
{
workspace[g] = NULL;
}
// NULL out underlying data
workspaceData = NULL;
workspaceSizeInBytes = 0;
}
// if we succeed in the allocation, set pointer aliases for workspaces
for (int g = 0; g < (this->group_ * CUDNN_STREAMS_PER_GROUP); g++)
{
workspace[g] = reinterpret_cast<char *>(workspaceData) + g * max_workspace;
}
}
// Tensor descriptor for bias.
if (this->bias_term_)
{
cudnn::setTensor4dDesc<Dtype>(
&bias_desc_, 1, this->num_output_ / this->group_, 1, 1);
}
}
template <typename Dtype>
CuDNNDeconvolutionLayer<Dtype>::~CuDNNDeconvolutionLayer()
{
// Check that handles have been setup before destroying.
if (!handles_setup_)
{
return;
}
for (int i = 0; i < bottom_descs_.size(); i++)
{
cudnnDestroyTensorDescriptor(bottom_descs_[i]);
cudnnDestroyTensorDescriptor(top_descs_[i]);
cudnnDestroyConvolutionDescriptor(conv_descs_[i]);
}
if (this->bias_term_)
{
cudnnDestroyTensorDescriptor(bias_desc_);
}
cudnnDestroyFilterDescriptor(filter_desc_);
for (int g = 0; g < this->group_ * CUDNN_STREAMS_PER_GROUP; g++)
{
cudaStreamDestroy(stream_[g]);
cudnnDestroy(handle_[g]);
}
cudaFree(workspaceData);
delete[] workspace;
delete[] stream_;
delete[] handle_;
delete[] fwd_algo_;
delete[] bwd_filter_algo_;
delete[] bwd_data_algo_;
delete[] workspace_fwd_sizes_;
delete[] workspace_bwd_data_sizes_;
delete[] workspace_bwd_filter_sizes_;
}
INSTANTIATE_CLASS(CuDNNDeconvolutionLayer);
} // namespace caffe
#endif
由于cuDNN对代码进行了改版,在cudnn.h文件中不再指出cudnn的版本号,而是放在了cudnn_version.h文件中,所以,将cudnn_version.h中对于版本段的代码复制到cudnn.h文件中,代码如下:
locate cudnn_version.h
sudo gedit /usr/local/cuda/targets/x86_64-linux/include/cudnn_version.h
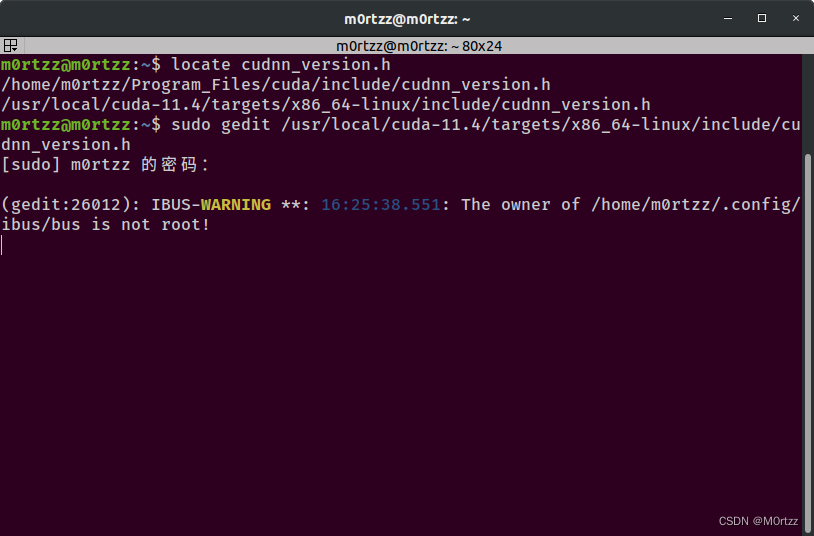
复制其中的非注释部分:
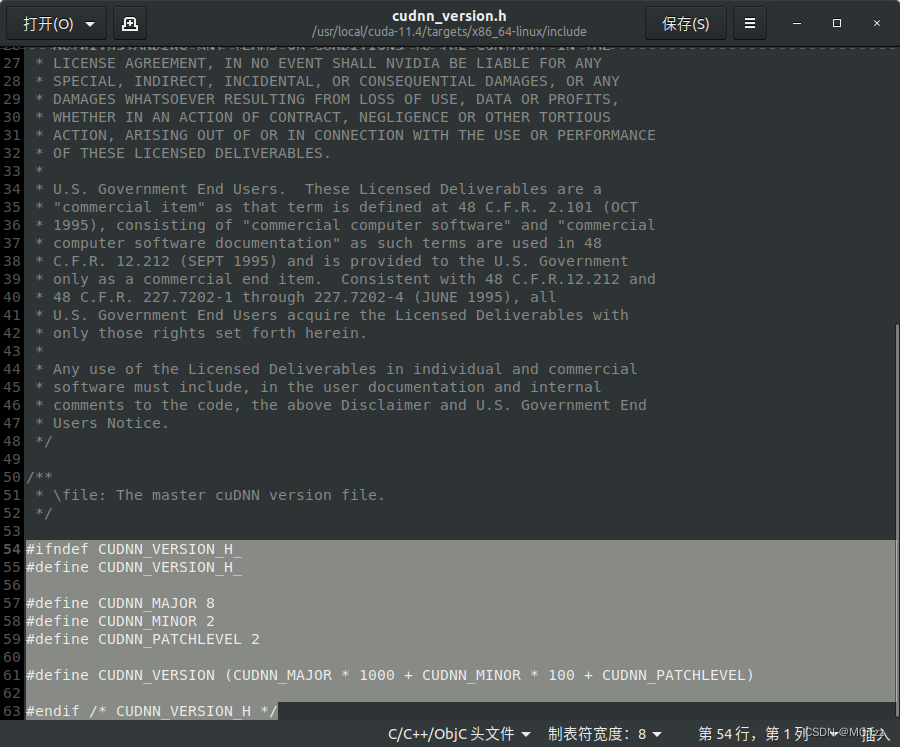
sudo gedit /usr/local/cuda/targets/x86_64-linux/include/cudnn.h
粘贴到最开头:
然后打开caffe包下的cudnn.hpp文件并指定cudnn.h路径:

之后重新执行编译:
sudo make clean && make all -j$(nproc)
生成以下静态库和共享库文件:
测试,时间较慢,耐心等待~
sudo make test -j$(nproc)
sudo make runtest -j$(nproc)
sudo make pycaffe -j$(nproc)
可能会有报错,但问题不大,我们只是需要那些库文件~
24.安装libfreenect2
git clone https://gitcode.com/mirrors/OpenKinect/libfreenect2.git
cd libfreenect2 && mkdir build && cd build/
cmake -j$(nproc) .. -DENABLE_CXX11=ON
sudo make -j$(nproc)
sudo make install
sudo cp ../platform/linux/udev/90-kinect2.rules /etc/udev/rules.d/
25.安装vtk8.2.0及PCL1.9.1
下载VTK-8.2.0.zip
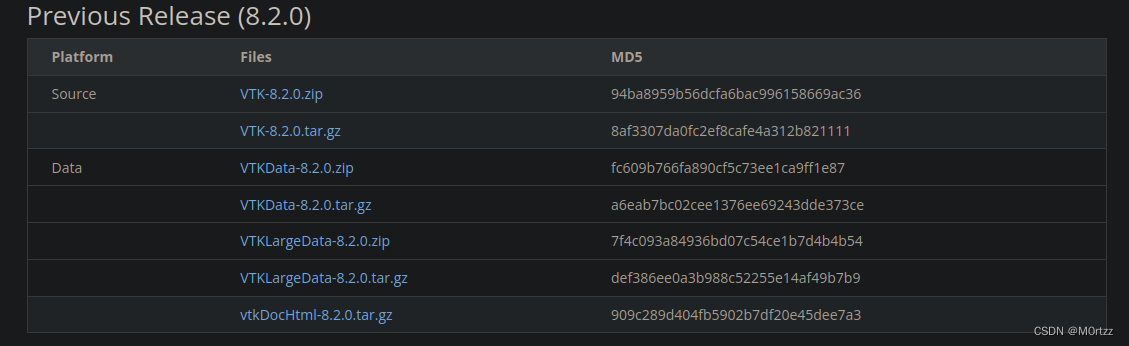
解压之后,进入文件夹打开终端:
sudo apt install cmake-gui && mkdir build && cd build && cmake-gui
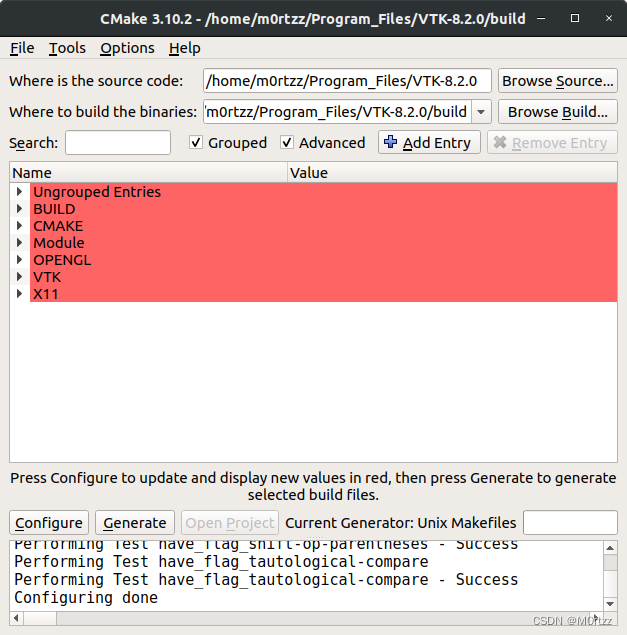
单击Configure后勾选以下两项后单击Configure和Generate
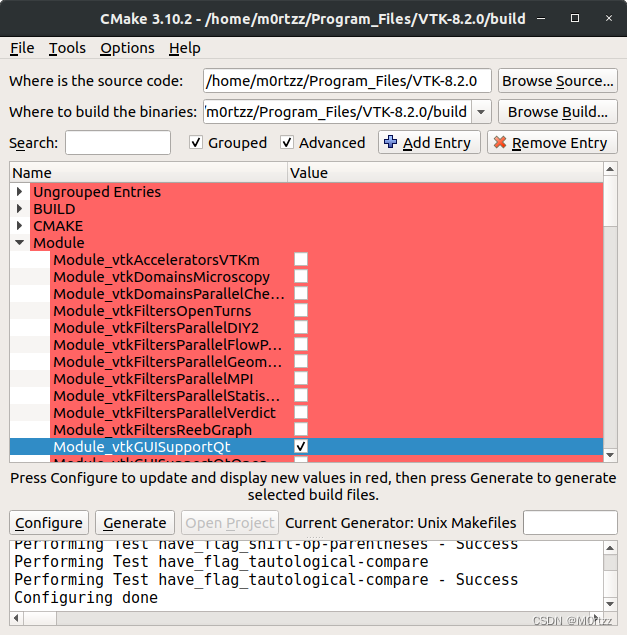
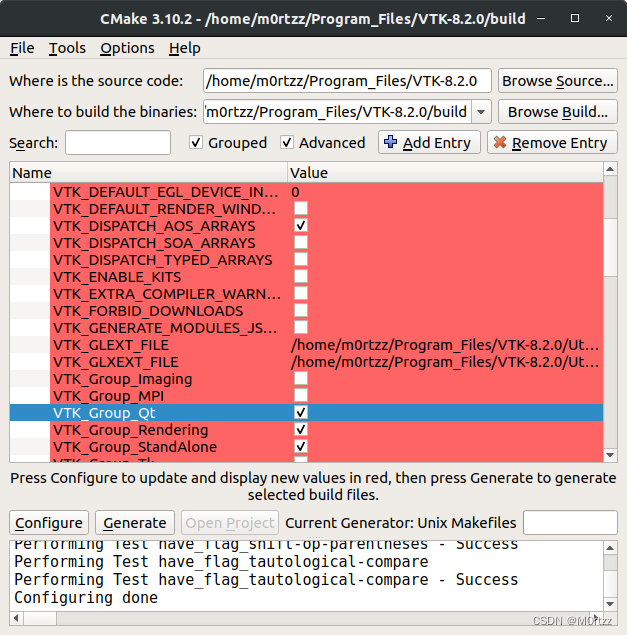
sudo make -j$(nproc)
sudo make install
接下来安装pcl:
git clone -b pcl-1.9.1 https://gitcode.com/mirrors/PointCloudLibrary/pcl.git pcl-1.9.1
之后进入文件夹打开终端输入:
mkdir release && cd release
cmake -D CMAKE_BUILD_TYPE=None \
-D CMAKE_INSTALL_PREFIX=/usr \
-D BUILD_GPU=ON-DBUILD_apps=ON \
-D BUILD_examples=ON \
-D CMAKE_INSTALL_PREFIX=/usr \
-j$(nproc) ..
sudo make -j$(nproc)
sudo make install
26.安装CarlaUE4(必须是Carla的UE仓库里的carla分支才可以通过安装Carla时的编译)
find . -name "*.sh" -exec dos2unix {} +
find . -name "*.sh" -exec chmod +x {} +
sudo chown -R m0rtzz: *
若报错:

因Epic更新了gitdeps,但Github上却没有更新,所以需要进入Github官方仓库release界面寻找对应版本的Commit.gitdeps.xml替换原来的文件即可:
https://github.com/EpicGames/UnrealEngine/releases/tag
若报错:
个人认为是因执行Setup.sh脚本未赋予root权限导致依赖未安装完整,所以再次执行:
sudo ./Setup.sh
// @file : CubemapUnwrapUtils.cpp
// Use
RHICmdList.GetBoundVertexShader() instead of GetVertexShader()
RHICmdList.GetBoundPixelShader() instead of GetPixelShader()
// Instead of the given macros, use code as below.
GraphicsPSOInit.BoundShaderState.VertexShaderRHI = VertexShader.GetVertexShader();
GraphicsPSOInit.BoundShaderState.PixelShaderRHI = PixelShader.GetPixelShader();
http://cdn.unrealengine.com/Toolchain_Linux/native-linux-v17_clang-10.0.10centos.tar.gz
cd your-path/UnrealEngine_4.26/Engine/Extras/ThirdPartyNotUE/SDKs/HostLinux/Linux_x64/
tar -zxvf native-linux-v17_clang-10.0.1-centos7.tar.gz
27.安装Carla0.9.13(添加fisheye sensor模块)
修改Update.sh下载网址为南方科技大学镜像站的网址:
#CONTENT_LINK=http://carla-assets.s3.amazonaws.com/${CONTENT_ID}.tar.gz
CONTENT_LINK=https://mirrors.sustech.edu.cn/carla/carla_content/${CONTENT_ID}.tar.gz
// @file : test_streaming.cpp
// Line 58
carla::streaming::low_level::Server<tcp::Server> srv(io.service, TESTING_PORT);
// Line 63
carla::streaming::low_level::Client<tcp::Client> c;
// Line 93
carla::streaming::low_level::Server<tcp::Server> srv(io.service, TESTING_PORT);
// Line 96
carla::streaming::low_level::Client<tcp::Client> c;
# @file : Package.sh(https://github.com/annaornatskaya/carla/tree/fisheye-sensor)
# copy_if_changed "./Plugins/" "${DESTINATION}/Plugins/"
copy_if_changed "./Unreal/CarlaUE4/Content/Carla/HDMaps/*.pcd" "${DESTINATION}/HDMaps/"
copy_if_changed "./Unreal/CarlaUE4/Content/Carla/HDMaps/Readme.md" "${DESTINATION}/HDMaps/README"
# NOTE: Modified by M0rtzz
if [ -d "./Plugins/" ] ; then
copy_if_changed "./Plugins/" "${DESTINATION}/Plugins/"
fi
P.S:
推荐一些linux办公常用的软件(linux版,不包括wine环境下,全部下载deb格式的安装包,系统架构可通过命令uname -a查看):
WPS Office 2019 for Linux-支持多版本下载_WPS官方网站
搜狗输入法-首页(下载安装包后,官方会跳转至安装教程,严格按照步骤执行)
Documentation for Visual Studio Code(推荐打开Settings Sync,换电脑时设置可以同步)
可以水平和垂直分割的bash终端:
sudo apt install terminator
trash命令:
sudo apt install trash-cli
tree命令:
sudo apt install tree
查看系统信息:
sudo apt install neofetch
rar文件解压工具:
sudo apt install unrar
解决不能观看MP4文件:
sudo apt update
sudo apt install libdvdnav4 libdvdread4 gstreamer1.0-plugins-bad gstreamer1.0-plugins-ugly libdvd-pkg
sudo apt install ubuntu-restricted-extras
sudo dpkg-reconfigure libdvd-pkg
系统优化:
sudo apt update
sudo apt install gnome-tweak-tool
火狐浏览器优化:
地址栏输入:
about:config
full-screen-api.warning.timeout
设置为0~
full-screen-api.transition-duration.enter
和
full-screen-api.transition-duration.leave
都设置为0 0~
browser.search.openintab
browser.urlbar.openintab
browser.tabs.loadBookmarksInTabs
都设置为true~















 5266
5266











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









