






 本文详细探讨了堆垛机的机械结构,重点介绍了采用汇川MD810变频器的双闭环控制,以及汇川SV660N伺服的全闭环运动控制。还涉及电力载波和节能控制方案,展示了现代机械技术在精确定位和能效优化中的应用。
本文详细探讨了堆垛机的机械结构,重点介绍了采用汇川MD810变频器的双闭环控制,以及汇川SV660N伺服的全闭环运动控制。还涉及电力载波和节能控制方案,展示了现代机械技术在精确定位和能效优化中的应用。
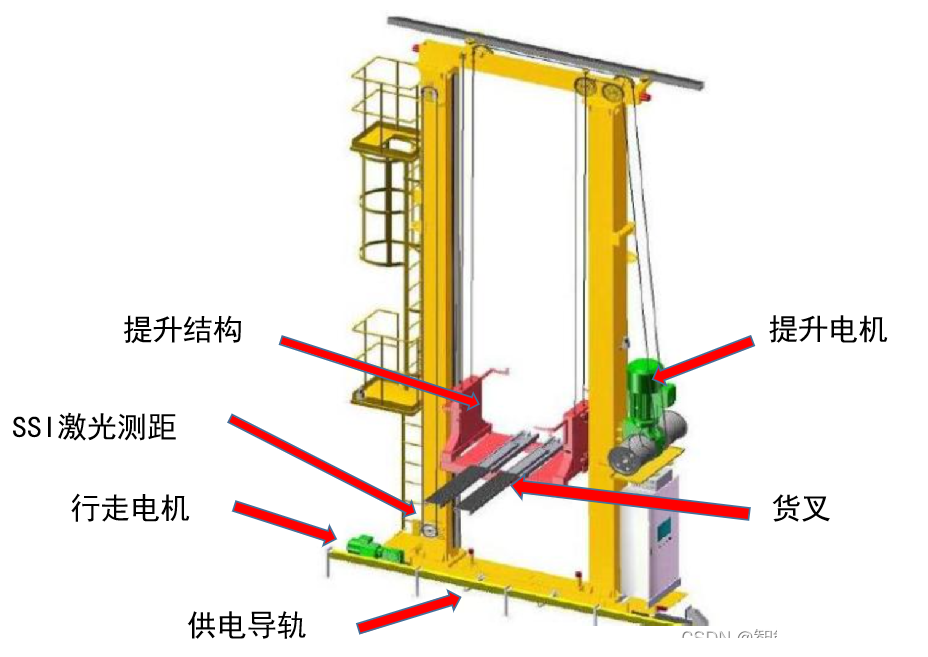
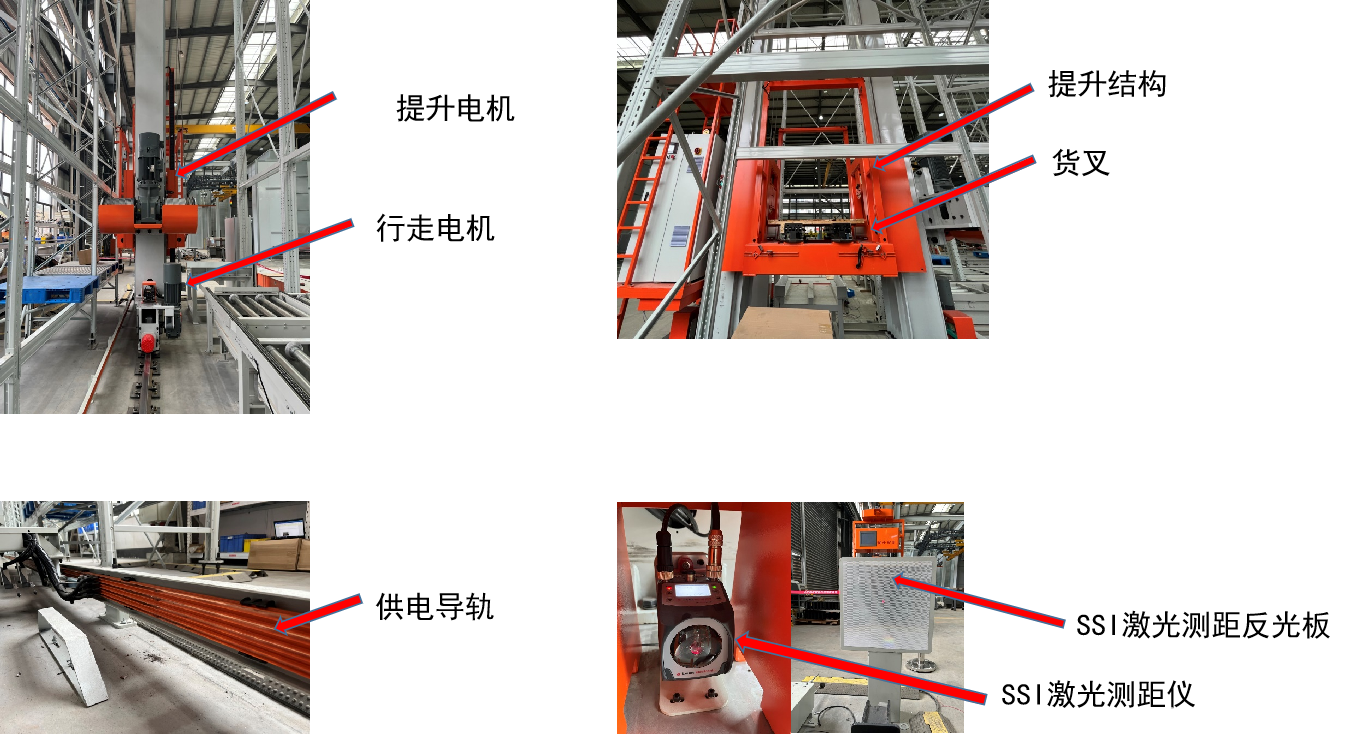
一、堆垛机机械结构
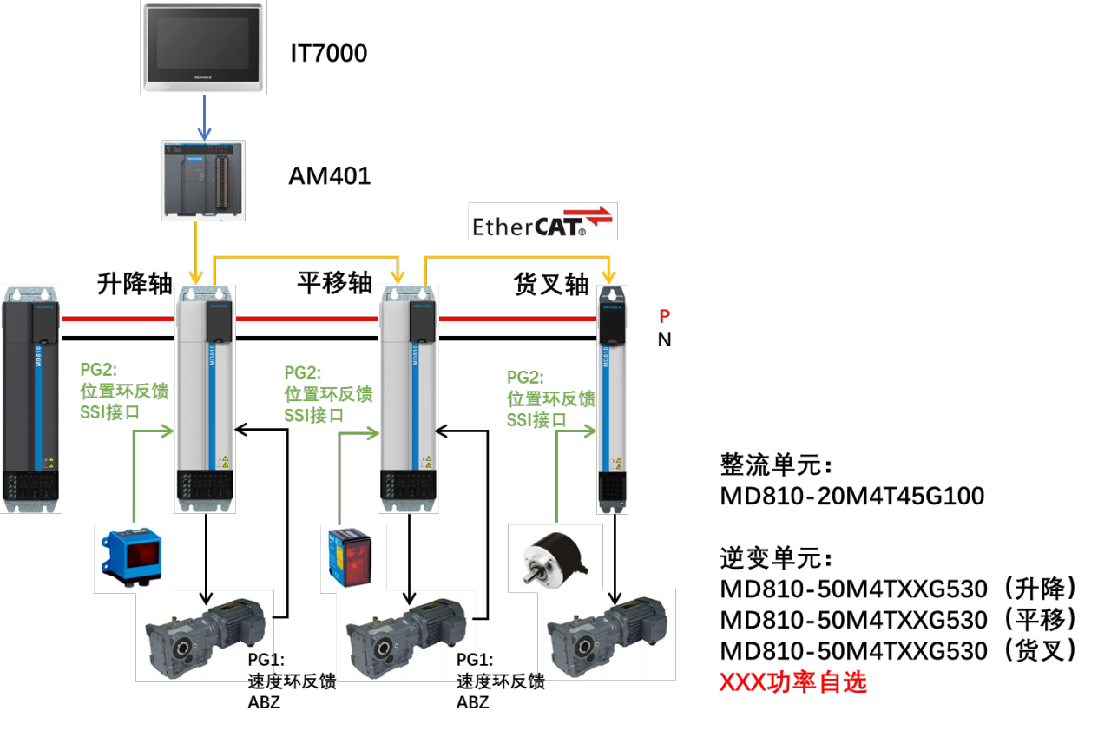
二、变频器方案

该系统采用汇川MD810系列变频器作为驱动单元,利用变频器的SSI接口接收外部激光测距信号,实现编码器+激光测距的双闭环控制,其速度环运算基于电机编码器,位置环运算则基于外部激光测距信号,通过变频器内置的全闭环内部定位功能,实现基于外部激光测距信号的闭环定位控制。
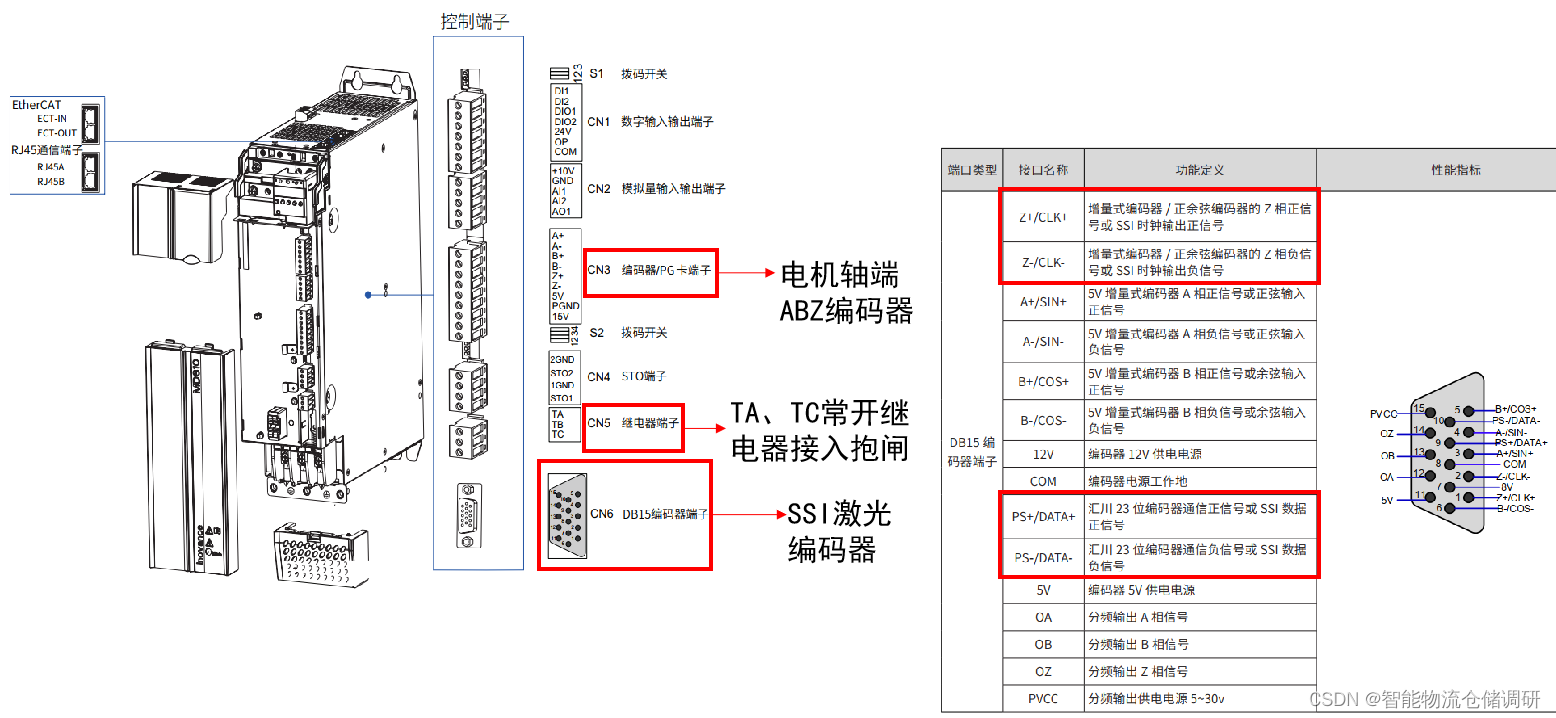
变频器接线:
电机全闭环控制 (s曲线)
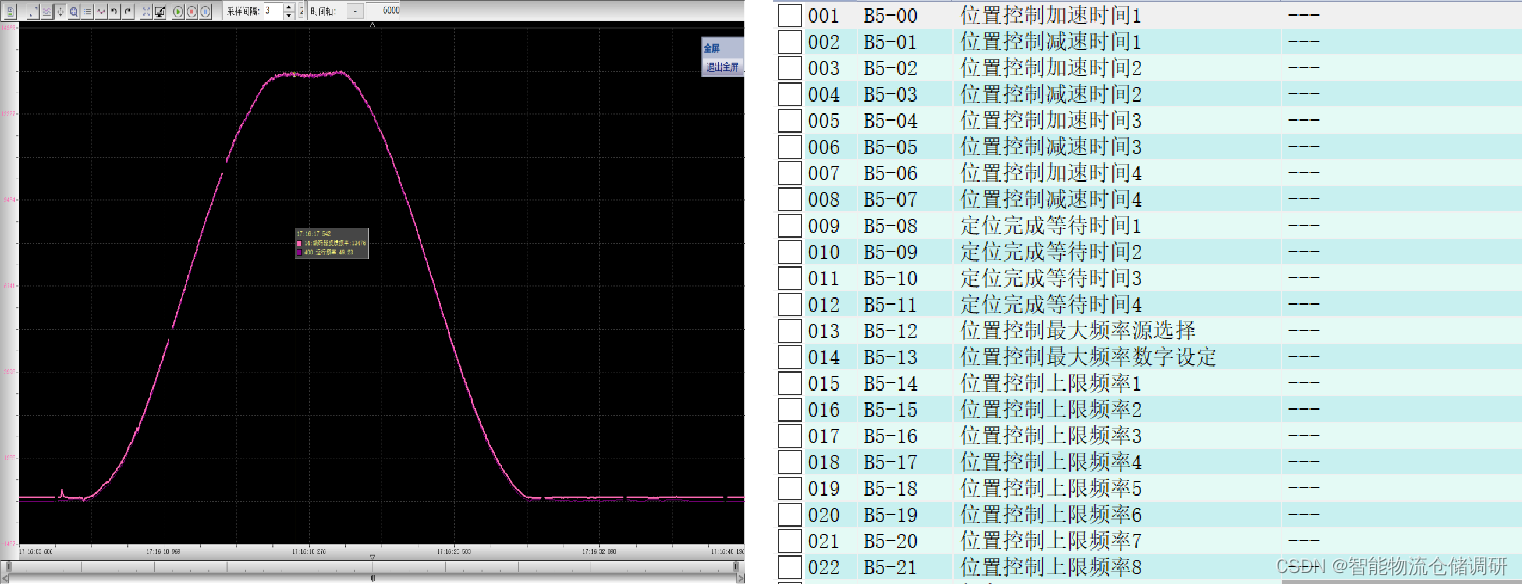
上位机通过总线下发定位位置及启动命令,变频器接收到指令后,自动规划速度曲线(默认S曲线),上限频率及减速时间可调,自动实现高速平稳定位。
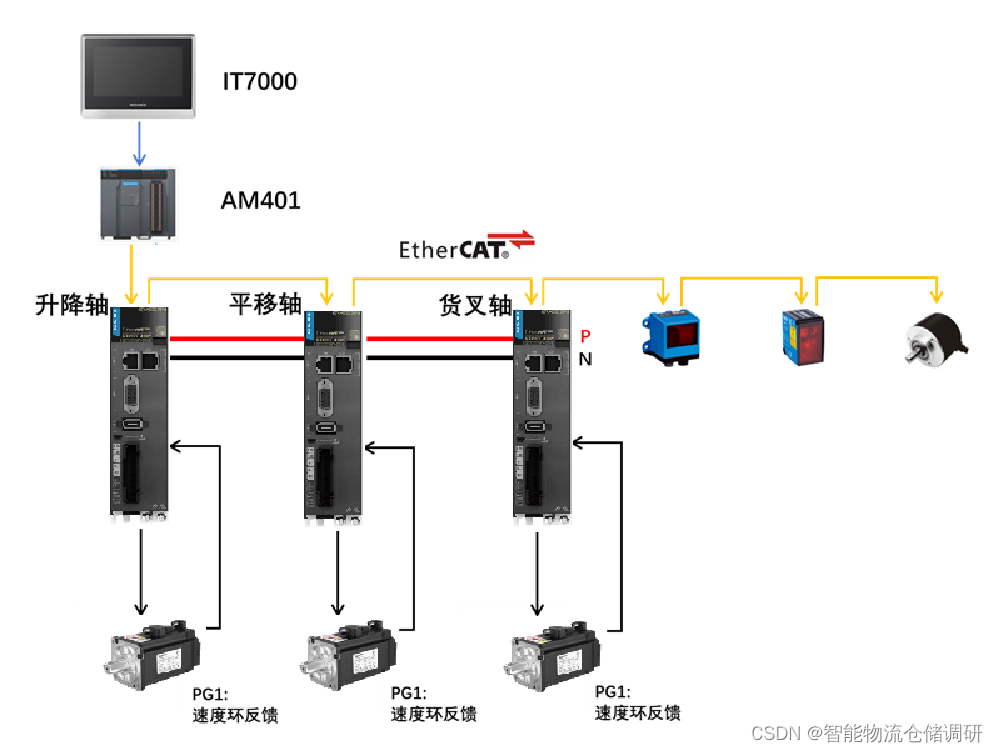
三、伺服方案
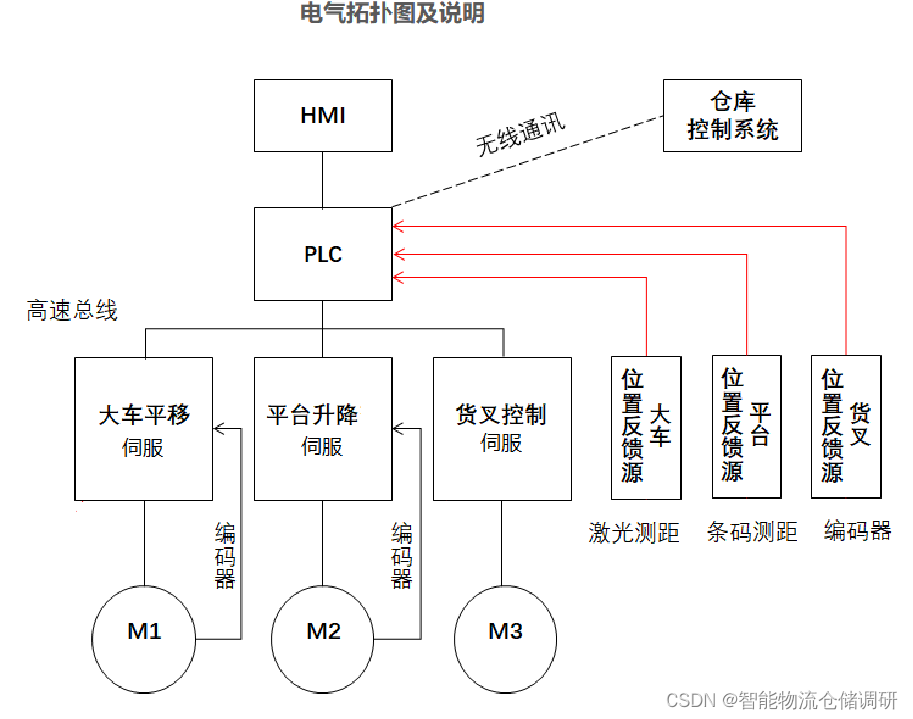
该系统采用汇川SV660N系列伺服作为驱动单元,外部激光测距信号通过总线与PLC进行交互,伺服电机工作于速度模式,通过PLC的全闭环运动控制库实现基于外置激光测距的位置环运算,实现全闭环功能。
控制算法:
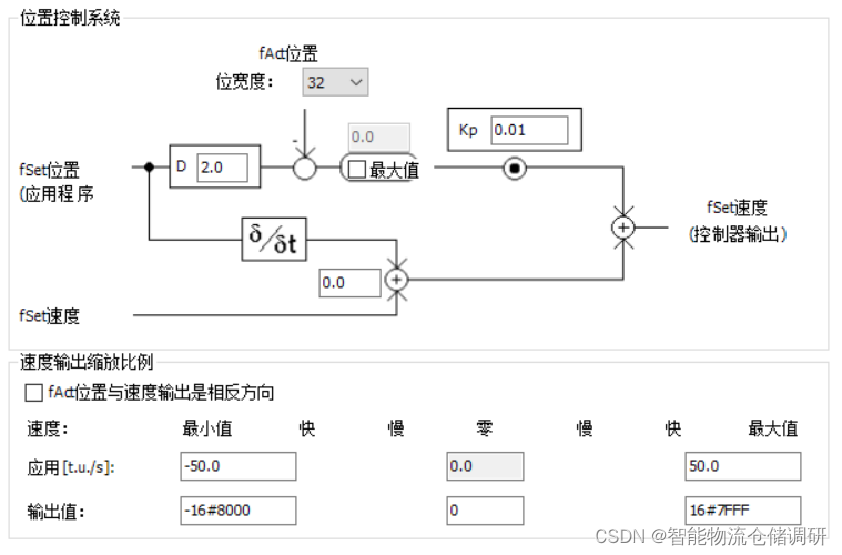 AC800系列PLC运动控制库可以实现定位控制的速度/位置环独立运算,通过总线将激光测距信号接入PLC,即可实现高精度全闭环定位控制。
AC800系列PLC运动控制库可以实现定位控制的速度/位置环独立运算,通过总线将激光测距信号接入PLC,即可实现高精度全闭环定位控制。
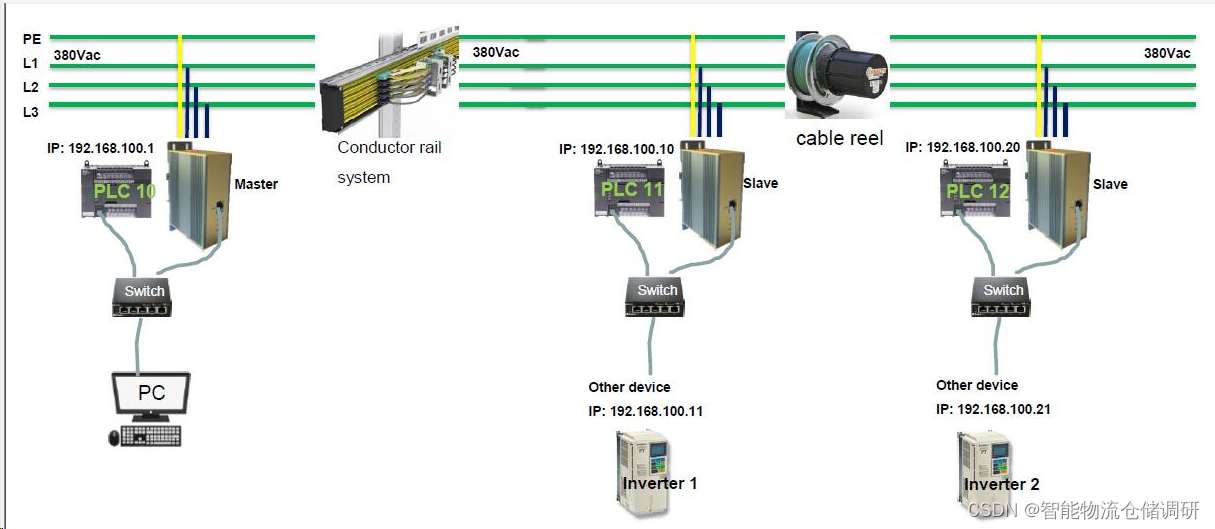
四、电力载波方案
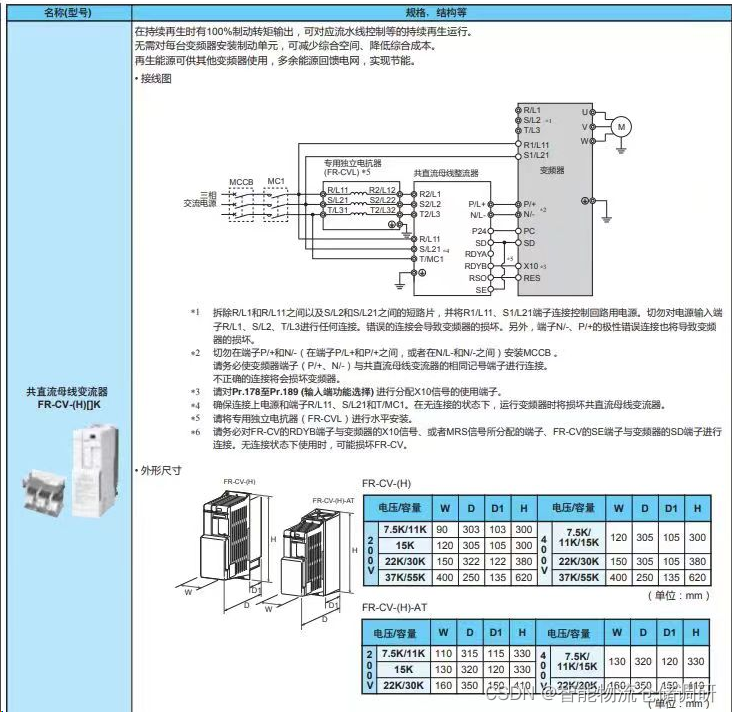
五、节能控制方案(共直流母线方案)


















 1378
1378

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











