







背景
从Vista之后,Windows为了显示的美观,引入了一个DWM.exe(Windows Desktop Manager)的进程,这个进程的一个重要作用就是合成,一个非常明显的特点就是半透明效果(也就是平时说的AERO特效)。
在XP下面,如果一个窗口挡住了另外一个窗口,那么下面的窗口就完全不可见了,这个其实很容易理解,因为一块画布盖住了另外一块画布,那么下面的肯定就不可见了。但是从Vista开始,我们就可以发现,当我们使用窗口盖住底下窗口的时候,在窗口栏上我们依旧可以看到底下窗口的影子;这个就是DWM.exe的功劳,本文就来探讨一下这个进程的基本原理。
1.DwmEnableComposition
在Win7下面提供了相关函数可以停掉/启用DWM的窗口合成,这个函数声明如下:

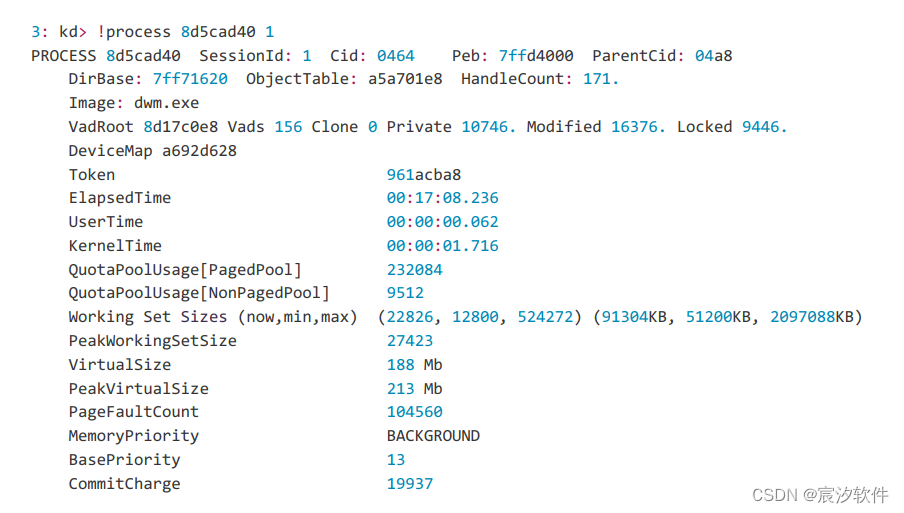
其中 DWM_EC_ENABLECOMPOSITION 参数为启用DWM合成, DWM_EC_DISABLECOMPOSITION 为禁止DWM合成。启用合成之后,Windows就会的DWM.exe就会开启合成的工作,这个进程如下:
1.1 ENABLECOMPOSITION
我们先来看一下启用合成是什么逻辑流程,当我们调用 DwmEnableComposition 这个函数的时候,将会调用LAPC给DWM响应,在DWM操作中,整个过程如下:
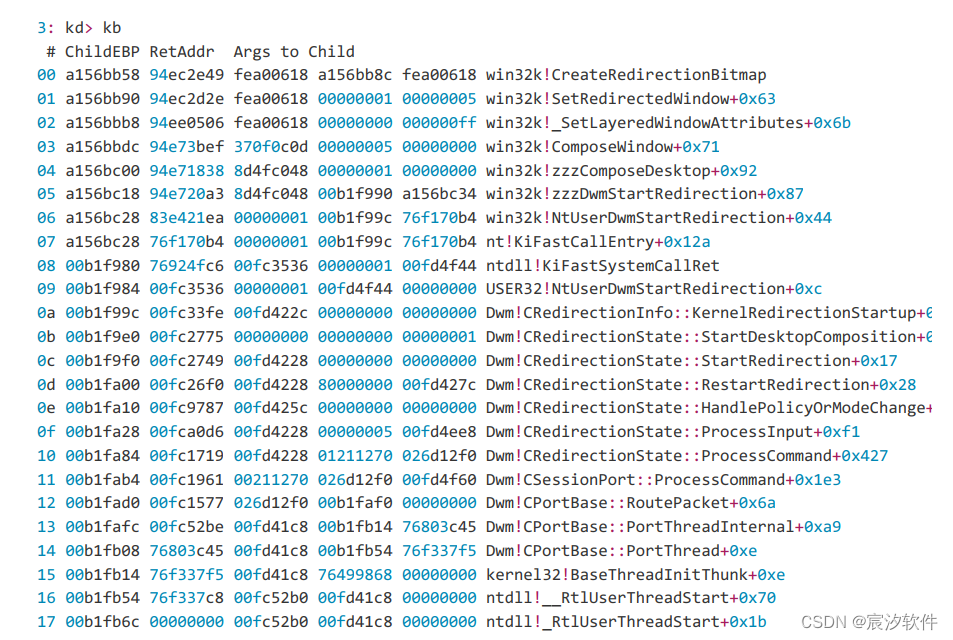
如果要分析里面的所有操作过程是比较复杂的,但是这里可以通过大致可以看出基本流程:
- 在Win32k中提供 NtUserDwmStartRedirection 来启动DWM的合成(重定向)。
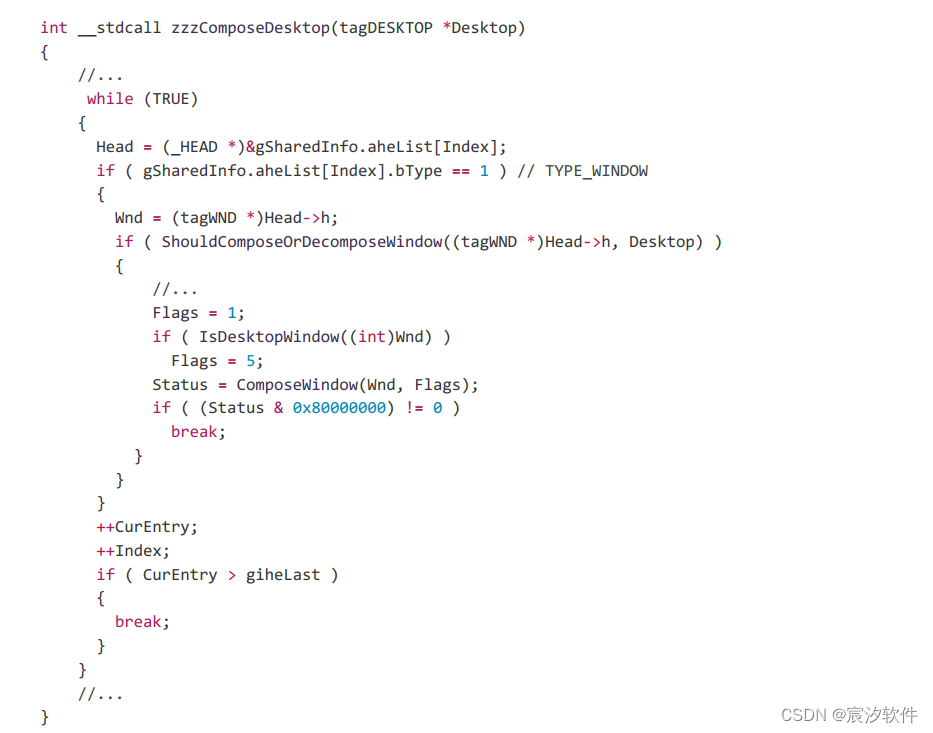
- 函数 zzzComposeDesktop 针对当前桌面进行合成。
- CreateRedirectionBitmap 针对每一个窗口创建一个重定向的Bitmap用来绘图。
zzzComposeDesktop 这个函数针对桌面的每一个窗口进行合成操作:
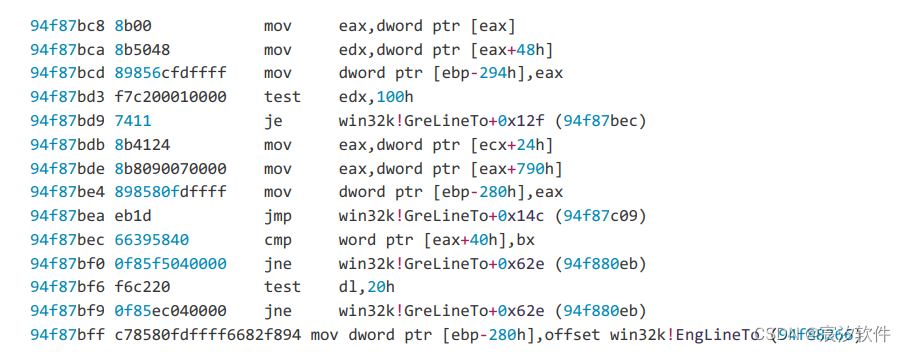
当启用合成之后,那么绘图将会有什么变化呢?这里我们用LineTo这个函数来看一下,这个函数绘制如下:
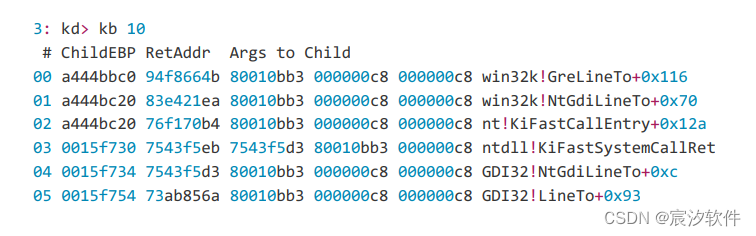
此时的汇编代码如下:
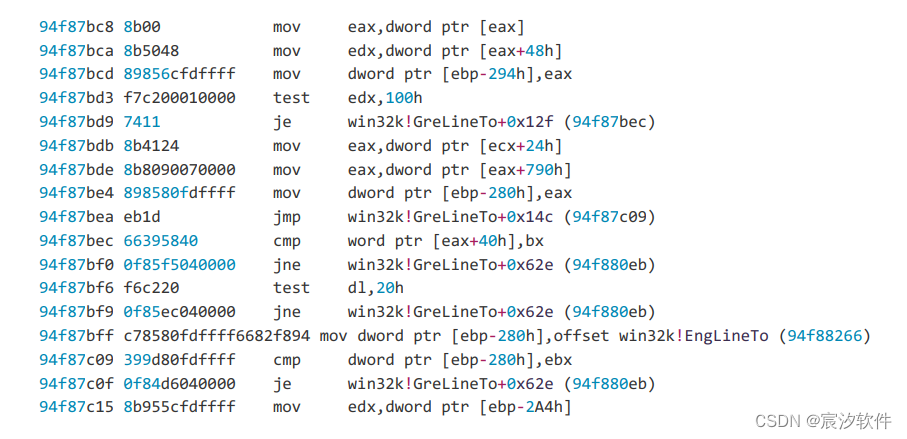
其中合成状态下的值信息如下:
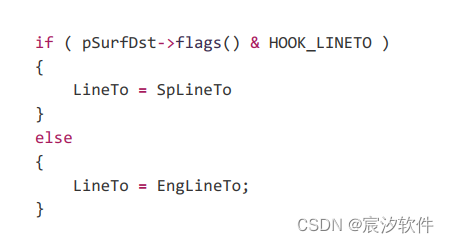
大致的C代码如下:
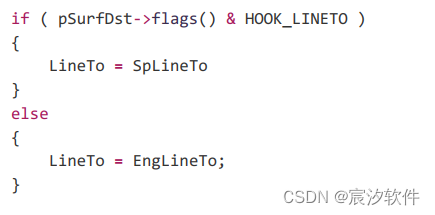
EngLineTo 这个函数比较明确,就是Win32k的引擎函数,这个是通过软件的方式在Surface上面绘图。也就是说在合成状态下面绘图,直接使用的是 Engxxx 系列函数。我们可以大致看一下所有的绘图函数都有类似的操作
1.2 DISABLECOMPOSITION
当提供 DWM_EC_DISABLECOMPOSITION 参数之后,合成就会被禁用了,此时的相关堆栈信息如下:
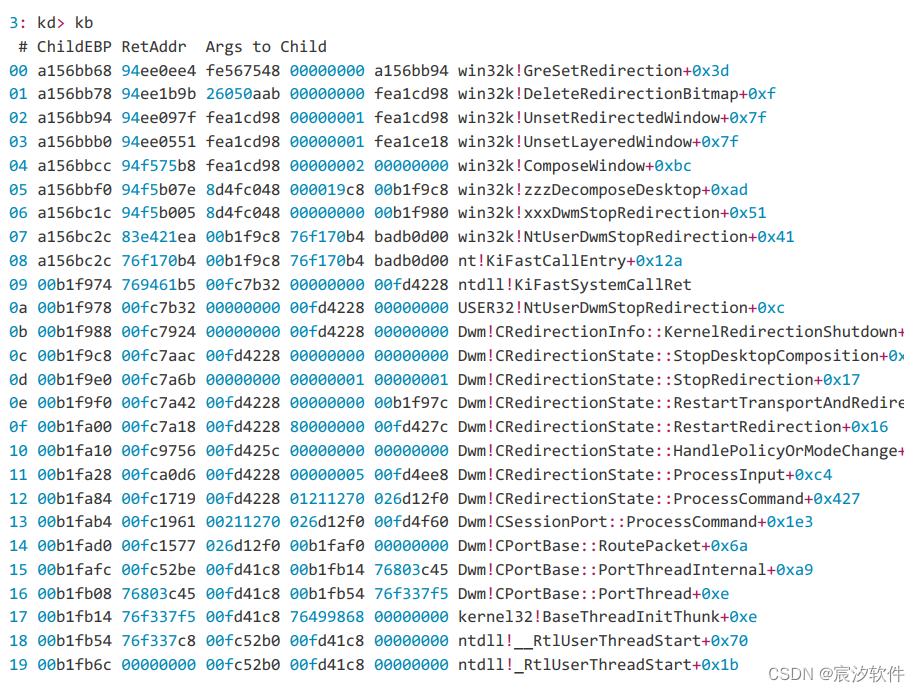
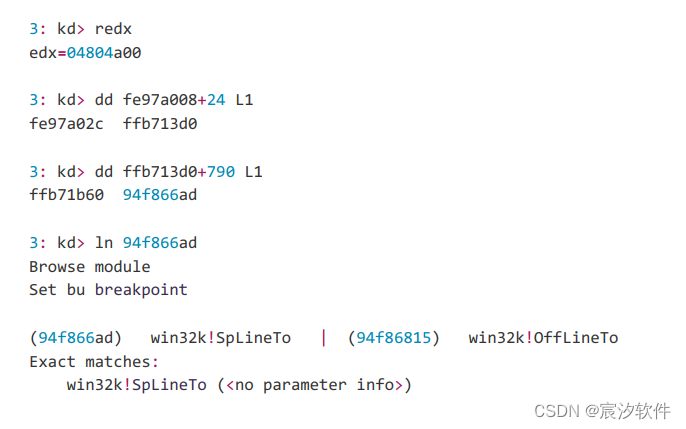
基本可以看到,禁用就是启用的反操作,那么这个时候的绘图操作又是怎么样子呢?相同的函数调用操作:
此时的HOOK标记是
也就是说使用 SpLineTo 来绘图,这个绘图函数就会调用显卡驱动相关的函数,例如调用堆栈如下:
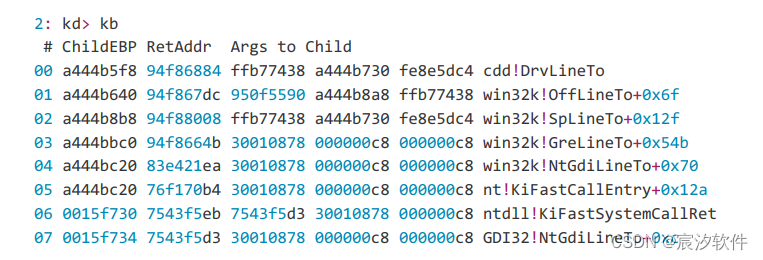
从这里可以发现,只要调用 SpLineTo 就会调用显卡驱动程序来进行GDI图像绘制
1.3 总结
从这里我们可以发现,只要开启了合成,GDI的绘图操作就跟GDI图形显示驱动没有任何的关系了,所以这里我们发现了一个比较重要的特性,对于Mirror驱动,我们只要开启的话AERO特性就会被关闭了(不然Mirror就无法采集到绘图操作了)。
2. DWM
DWM的一个非常重要的操作就是合成功能,对于这个进程的功能和原理,并没有太多的资料,本人也没有详尽的深入研究过原理,不过我们可以大致根据 Present 的堆栈来看一下基本流程:
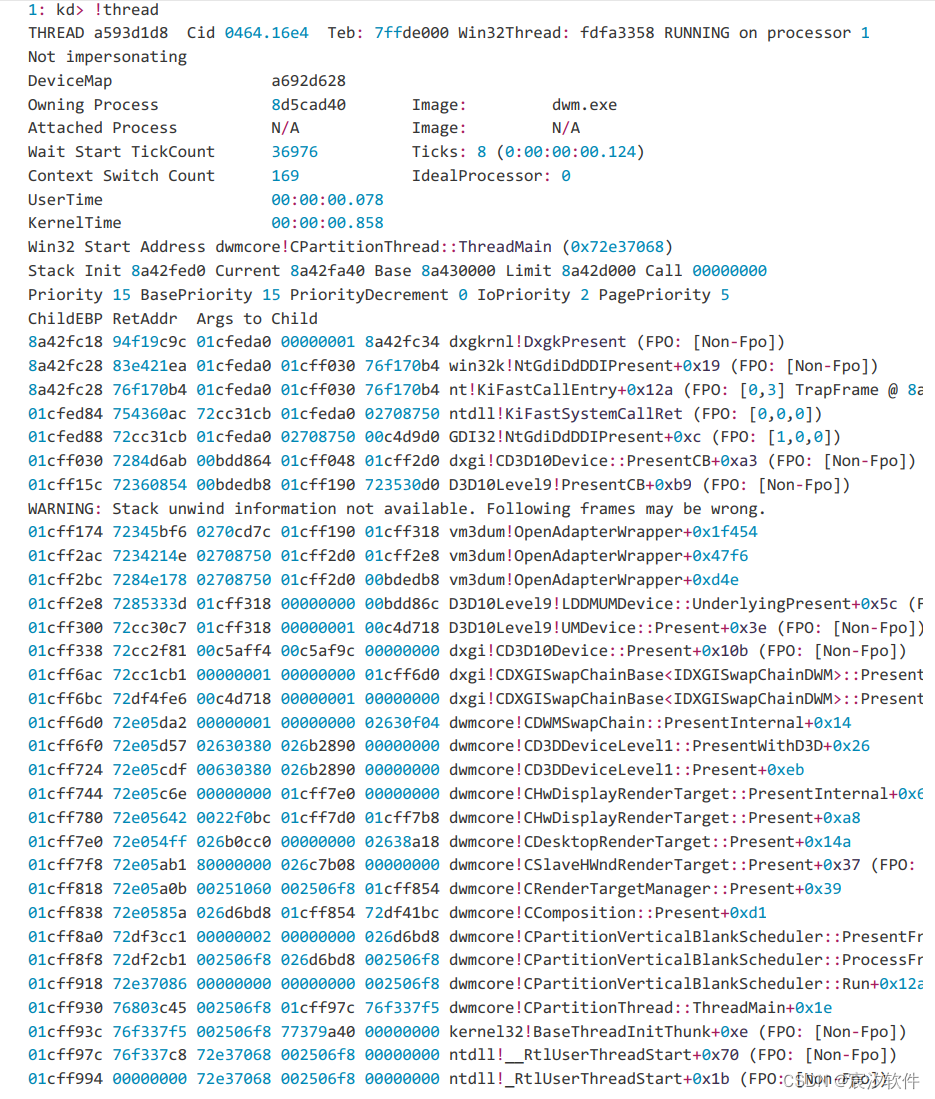
从这里可以猜测, CPartitionVerticalBlankScheduler 这个应该就是合成的线程了,从整个DWM的运行CPU来看,也是该线程占用最高:
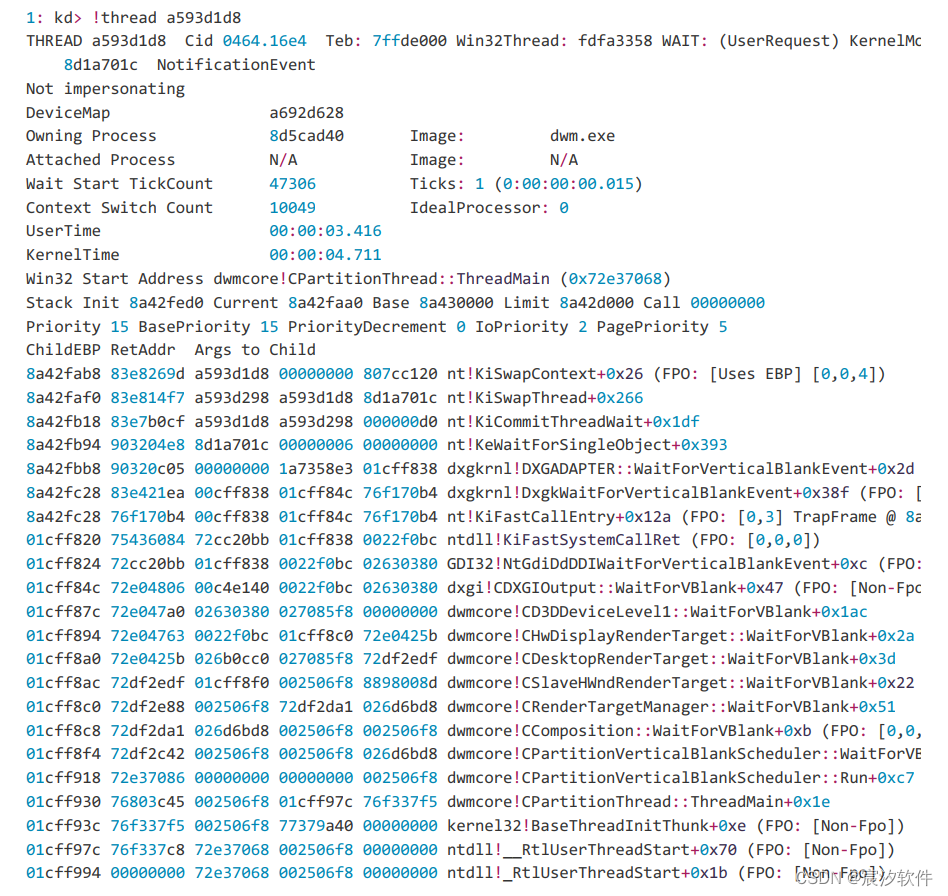
从这里看,似乎是在等待垂直同步的信号,每次刷新显示器,都会进行合成操作。
3. 关于新版本
从Windows8开始DWM进程就无法停止了,并且虽然没有了半透明的效果,但是合成操作还无法取消,我们看一下Win10环境下的DWM合成堆栈,如下:

通过分析Win32kfull可以发现,在Win10 下面对于绘图操作依旧使用的是如下代码:
也就是说在DWM开启的情况下,XPDM还是无法生效;那么怎么关闭DWM合成呢?在Windows10 下面本人暂时还没有找到方法,那么从这里基本可以发现,在Windows10以后,XPDM对于绘图来说就没什么作用了,所有操作均在DWM中合成然后进行D3D绘制了。但是我们可以发现已经比较有意思的现象,虽然XPDM在Win10下面没有什么用途了,但是Mirror Driver在Win10 依旧可正常工作,这个就是Win10 专门针对Mirror Driver做了特殊的兼容处理(相比其他的操作系统,Windows的兼容性还是做的比较不错),这个问题我们在这里不深究细谈。


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











