






1.随机迷宫生成算法
首先,将地图分割成若干相互隔离的小格,将起点设置成扩展状态,然后从起点开始,向外进行扩展,同时使用随机函数选择一个可行的墙面进行打通,这样就构成了迷宫的地图
迷宫随机生成算法部分代码:
//生成基础地图(单元格)
void maze::base() {
for (int i = 0; i < level * 2 + 1; i++) {
for (int j = 0; j < level * 2 + 1; j++) {
if (i == 0 || j == 0 || i == level * 2 + 1 - 1 || j == level * 2 + 1 - 1) {
map[i][j] = -1; //边界
} else if (i % 2 != 0 && j % 2 != 0) {
map[i][j] = 1; //空 初始化后未判定
} else {
map[i][j] = 0; //墙壁
}
}
}
}void maze:: random() {
int t = 0;
for (int i = 0; i < level * 2 + 1; i++) {
for (int j = 0; j < level * 2 + 1; j++) {
if (map[i][j] == 2) {
t++;
}
}
}
int k = rand() % t + 1;
t = 0;
for (int i = 0; i < level * 2 + 1; i++) {
for (int j = 0; j < level * 2 + 1; j++) {
if (map[i][j] == 2) {
t++;
if (t == k) {
opera(i, j);
goto arrive;
}
}
}
}
arrive:
if (!judge()) {
map[start_x][start_y] = 6;
}
}2.A*算法自动寻路
定义
A*算法,A*(A-Star)算法是一种静态路网中求解最短路径最有效的直接搜索方法,也是解决许多搜索问题的有效算法。算法中的距离估算值与实际值越接近,最终搜索速度越快。
定义解析
A*算法是一个“搜索算法”,实质上是广度优先搜索算法(BFS)的优化。从起点开始,首先遍历起点周围邻近的点,然后再遍历已经遍历过的点邻近的点,逐步的向外扩散,直到找到终点。
A*算法的作用是“求解最短路径”,如在一张有障碍物的图上移动到目标点,以及八数码问题(从一个状态到另一个状态的最短途径)
A*算法的思路类似图的Dijkstra算法,采用贪心的策略,即“若A到C的最短路径经过B,则A到B的那一段必须取最短”,找出起点到每个可能到达的点的最短路径并记录。
void mazeWidget::on_search_btn_clicked() {
std::priority_queue<node> q; //考虑寻找最短路径的节点
this->setFocus();
if(flag)return;
map->map[map->p_x][map->p_y]=5;
memcpy(mpback,map->map,sizeof(map->map)); //map内容复制给mpback
q.push(node(map->p_x,map->p_y,0,0,0));
while(q.size()){
node tmpdata=q.top();
q.pop();
for(int i=0;i<4;i++){
int dx=tmpdata.xnow+direct[i][0];
int dy=tmpdata.ynow+direct[i][1];
if(mpback[dx][dy]==0||mpback[dx][dy]==-1||mpback[dx][dy]==9)continue;
pre[dx][dy]=qMakePair(tmpdata.xnow,tmpdata.ynow);
if(mpback[dx][dy]==6){
flag=true;
break;
}
mpback[dx][dy]=9; //已检测,不再考虑
node topush;
topush.xnow=dx,topush.ynow=dy;
topush.f=tmpdata.f+1;
topush.h=mahan(dx,dy);
topush.g=topush.h+topush.f;
q.push(topush);
}
if(flag) break;
}
int tmpx=map->start_x,tmpy=map->start_y;
while(map->map[tmpx][tmpy]!=5){ //回溯
map->map[tmpx][tmpy]=5;
int a=pre[tmpx][tmpy].first;
int b=pre[tmpx][tmpy].second;
tmpx=a,tmpy=b;
}
map->map[map->start_x][map->start_y]=6;
repaint();
return;
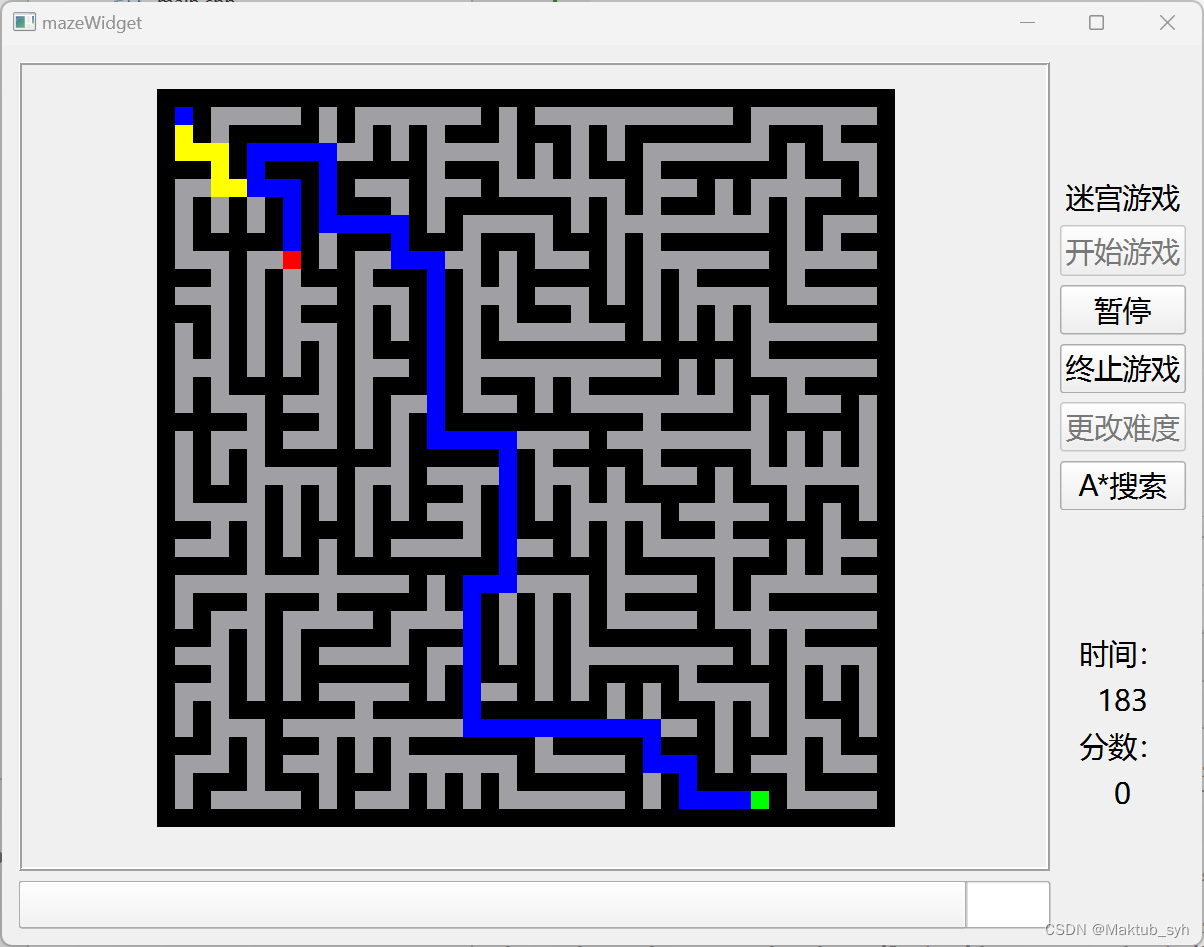
}具体界面如下:
蓝色为起点,以及A*寻路路径,黄色为方向键控制行走路径,红色为移动目标,绿色为终点。
难度可更改,有时间限制以及计分功能。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









