









在平面上,如果已知
△P0P1P2
的三个顶点坐标
P0(x0,y0), P1(x1,y1), P2(x2,y2)
和另一点
P
的坐标
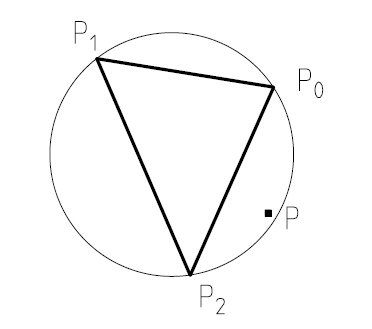
这里给出两种判断方法,第一种方法是先求出
△P0P1P2
的外接圆圆心坐标,然后得到三角形的半径,比较半径和圆心到点
P
的距离,就能判断点
第一种方法
三角形的外心坐标公式为:
根据这个外心的坐标公式计算出外接圆的圆心坐标,就能得到圆的半径,从而判断出点 P 与外接圆的位置关系。
定义平面点的数据结构:
struct PointTri
{
double x; // x 坐标
double y; // y 坐标
};求解行列式用到能够计算
// 求 aij 的代数余子式
vector< vector<double> > Cofactor(vector< vector<double> > vecDet_ij, int i, int j)
{
int k;
vector< vector<double> > vecReturn;
vector< vector<double> >::iterator veck;
// vector<double>::iterator vecl;
// 初始化二维容器 vecReturn
k = 0;
for (veck=vecDet_ij.begin(); veck<vecDet_ij.end(); veck++)
{
if ((veck - vecDet_ij.begin()) != i)
{
vecReturn.push_back(*veck); // 加入除第 i 行外的所有行
vecReturn[k].erase(vecReturn[k].begin() + j);
k++;
}
}
return vecReturn;
}
// 计算行列式的值, 采用递归
double det_Array(vector< vector<double> > vecDet)
{
int i;
double Sum = 0.0;
vector< vector<double> >::iterator vec_Row = vecDet.begin();
vector<double>::iterator vec_Column = (*vec_Row).begin();
if (vecDet.size() == 1)
{
return *vec_Column;
}
else
{
i = 0;
for (; vec_Column < (*vec_Row).end(); vec_Column++)
{
Sum = Sum + pow(-1.0, i) * (*vec_Column) * det_Array( Cofactor(vecDet, 0, i++) );
}
return Sum;
}
}主要的判断函数为:
// 判断点 P 是否在圆内
bool InnerOROut(PointTri Vrtx0, PointTri Vrtx1, PointTri Vrtx2, PointTri Vrtx)
{
double Radius_2; // 半径的平方
/* double Radius_2T1, Radius_2T2;*/
double Cntrx, Cntry; //圆心坐标
// 求圆心和半径
vector< vector<double> > vecDet1, vecDet2;
vector<double> A, B, C;
// 计算圆心的 x 坐标
A.push_back(pow(Vrtx0.x, 2.0) + pow(Vrtx0.y, 2.0)); A.push_back(Vrtx0.y); A.push_back(1.0);
B.push_back(pow(Vrtx1.x, 2.0) + pow(Vrtx1.y, 2.0)); B.push_back(Vrtx1.y); B.push_back(1.0);
C.push_back(pow(Vrtx2.x, 2.0) + pow(Vrtx2.y, 2.0)); C.push_back(Vrtx2.y); C.push_back(1.0);
vecDet1.push_back(A); vecDet1.push_back(B); vecDet1.push_back(C);
A.clear(); B.clear(); C.clear();
A.push_back(Vrtx0.x); A.push_back(Vrtx0.y); A.push_back(1.0);
B.push_back(Vrtx1.x); B.push_back(Vrtx1.y); B.push_back(1.0);
C.push_back(Vrtx2.x); C.push_back(Vrtx2.y); C.push_back(1.0);
vecDet2.push_back(A); vecDet2.push_back(B); vecDet2.push_back(C);
Cntrx = det_Array(vecDet1) / (2 * det_Array(vecDet2));
// 计算圆心的 y 坐标
vecDet1.clear(); vecDet2.clear();
A.clear(); B.clear(); C.clear();
A.push_back(Vrtx0.x); A.push_back(pow(Vrtx0.x, 2.0) + pow(Vrtx0.y, 2.0)); A.push_back(1.0);
B.push_back(Vrtx1.x); B.push_back(pow(Vrtx1.x, 2.0) + pow(Vrtx1.y, 2.0)); B.push_back(1.0);
C.push_back(Vrtx2.x); C.push_back(pow(Vrtx2.x, 2.0) + pow(Vrtx2.y, 2.0)); C.push_back(1.0);
vecDet1.push_back(A); vecDet1.push_back(B); vecDet1.push_back(C);
A.clear(); B.clear(); C.clear();
A.push_back(Vrtx0.x); A.push_back(Vrtx0.y); A.push_back(1.0);
B.push_back(Vrtx1.x); B.push_back(Vrtx1.y); B.push_back(1.0);
C.push_back(Vrtx2.x); C.push_back(Vrtx2.y); C.push_back(1.0);
vecDet2.push_back(A); vecDet2.push_back(B); vecDet2.push_back(C);
Cntry = det_Array(vecDet1) / (2 * det_Array(vecDet2));
// 外接圆的半径的平方
Radius_2 = pow(Vrtx0.x - Cntrx , 2.0) + pow(Vrtx0.y - Cntry, 2.0);
// 判断 Vrtx0 是否在外接圆内或其上,若是,返回 true,否则,返回 false
double Rad_V0Cntr;
Rad_V0Cntr = pow(Vrtx.x - Cntrx , 2.0) + pow(Vrtx.y - Cntry, 2.0);
if (Rad_V0Cntr <= Radius_2)
{
return true;
}
else
{
return false;
}
}这种采用通用的计算行列式值的方法代码会比较多,针对三阶行列式的求解可以采用固定的公式,展开求解,针对这个特定的求解问题会显得简化一些:
// 判断点 P 是否在圆内
bool InnerOROut1(PointTri Vrtx0, PointTri Vrtx1, PointTri Vrtx2, PointTri Vrtx)
{
double Radius_2; // 半径的平方
double Cntrx, Cntry; //圆心坐标
// 求圆心和半径
double a1 = (Vrtx1.x - Vrtx0.x), b1 = (Vrtx1.y - Vrtx0.y);
double c1 = (a1*a1 + b1*b1) / 2.0;
double a2 = (Vrtx2.x - Vrtx0.x), b2 = (Vrtx2.y - Vrtx0.y);
double c2 = (a2*a2 + b2*b2) / 2.0;
double d = (a1*b2 - a2*b1);
Cntrx = Vrtx0.x + (c1 * b2 - c2 * b1) / d;
Cntry = Vrtx0.y + (a1 * c2 - a2 * c1) / d;
Radius_2 = pow(Vrtx0.x - Cntrx , 2.0) + pow(Vrtx0.y - Cntry, 2.0);
// 判断 Vrtx0 是否在外接圆内或其上,若是,返回 true,否则,返回 false
double Rad_V0Cntr;
Rad_V0Cntr = pow(Vrtx.x - Cntrx , 2.0) + pow(Vrtx.y - Cntry, 2.0);
if (Rad_V0Cntr <= Radius_2)
{
return true;
}
else
{
return false;
}
}主函数的调用示例:
void main()
{
system("color F1");
// -------------------------------------
PointTri P0, P1, P2, P;
P0.x = 0.0; P0.y = 0.0;
P1.x = 0.0; P1.y = 1.0;
P2.x = 1.0; P2.y = 0.0;
P.x = 0.5; P.y = 0.5;
// if (InnerOROut1(P0, P1, P2, P))
if (InnerOROut(P0, P1, P2, P))
{
cout << "P in the circle" << endl;
}
else
{
cout << "P not in the circle" << endl;
}
// -------------------------------------
system("pause");
}第二种方法
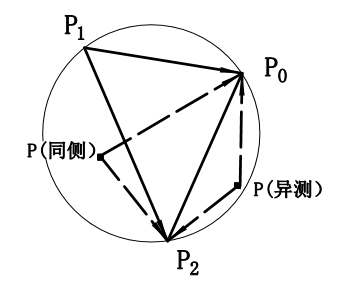
基本思路:
step1 计算
∠P0P1P2
和
∠P0PP2
的大小,两个角的大小在[0,
π
]范围内。
step1.1 如果
∠P0PP2=0
,则点
P
不在圆内,结束;如果
setp2 判断点
step2.1 这里通过判断向量积
P1P0−→−−×P1P2−→−−
与
PP0−→−×PP2−→−
是否同号,如果同号则在同一侧,否则在两侧。
step3 如果点
P
和
// 若果点 Vrtx 在外接圆内或在圆上返回 true, 否则返回 false
bool InnerOROut2(PointTri Vrtx0, PointTri Vrtx1, PointTri Vrtx2, PointTri Vrtx)
{
double PI = 3.14159265358979323846;
// 选择 P0P1 作为边, 相关的向量定义
PointTri P2P0, P2P1, PP0, PP1;
P2P0.x = Vrtx0.x - Vrtx2.x;
P2P0.y = Vrtx0.y - Vrtx2.y;
P2P1.x = Vrtx1.x - Vrtx2.x;
P2P1.y = Vrtx1.y - Vrtx2.y;
PP0.x = Vrtx0.x - Vrtx.x;
PP0.y = Vrtx0.y - Vrtx.y;
PP1.x = Vrtx1.x - Vrtx.x;
PP1.y = Vrtx1.y - Vrtx.y;
// 计算角 P0P2P1,
double angle_P0P2P1;
if (P2P0.x * P2P0.x + P2P0.y * P2P0.y < 0.000001 || P2P1.x * P2P1.x + P2P1.y * P2P1.y < 0.000001)
{
return false;
}
else
{
angle_P0P2P1 = acos((P2P0.x * P2P1.x + P2P0.y * P2P1.y) /
(sqrt(P2P0.x * P2P0.x + P2P0.y * P2P0.y) * sqrt(P2P1.x * P2P1.x + P2P1.y * P2P1.y)));
}
// 计算角 P0PP1,
double angle_P0PP1;
if (PP0.x*PP0.x + PP0.y*PP0.y < 0.000001 || PP1.x*PP1.x + PP1.y*PP1.y < 0.000001)
{
// 点 P 与点 P0,P1中的一点重合
return true;
}
else
{
angle_P0PP1 = acos((PP0.x*PP1.x + PP0.y*PP1.y) /
(sqrt(PP0.x*PP0.x + PP0.y*PP0.y) * sqrt(PP1.x*PP1.x + PP1.y*PP1.y)));
}
if (angle_P0PP1 < 0.000001)
{
// 点 P 在线段 P0P1 外,但三点共线
return false;
}
if ((PI/2.0 - angle_P0PP1) < 0.000001)
{
// 点 P 在线段 P0P1 内,三点共线
return true;
}
// 判断点 P2 和 P 在否在直线 P0P1 的同一侧
// 通过向量积来判断,PP0 X PP1, P2P0 X P2P1
double product_P2 = P2P0.x * P2P1.y - P2P1.x * P2P0.y;
double product_P = PP0.x * PP1.y - PP1.x * PP0.y;
if (product_P2 * product_P > 0) // 点 P,P2同侧
{
if (angle_P0P2P1 <= angle_P0PP1)
{
// 在同侧时,角P0P2P1 <= 角P0PP1,点 P 在圆内或圆上
return true;
}
else
{
return false;
}
}
else
{
// 不在同侧时
if (angle_P0PP1+angle_P0P2P1 - PI/2.0 >= 0.0)
{
return true;
}
else
{
return false;
}
}
}














 718
718











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









