







优化思路
CUDA入门之采用shared memory优化矩阵乘法(一)
中讲解了基础的利用Shared Memory优化矩阵乘法,在其中,申请的Shared Memory的形状为正方形,且大小等同于block的大小。
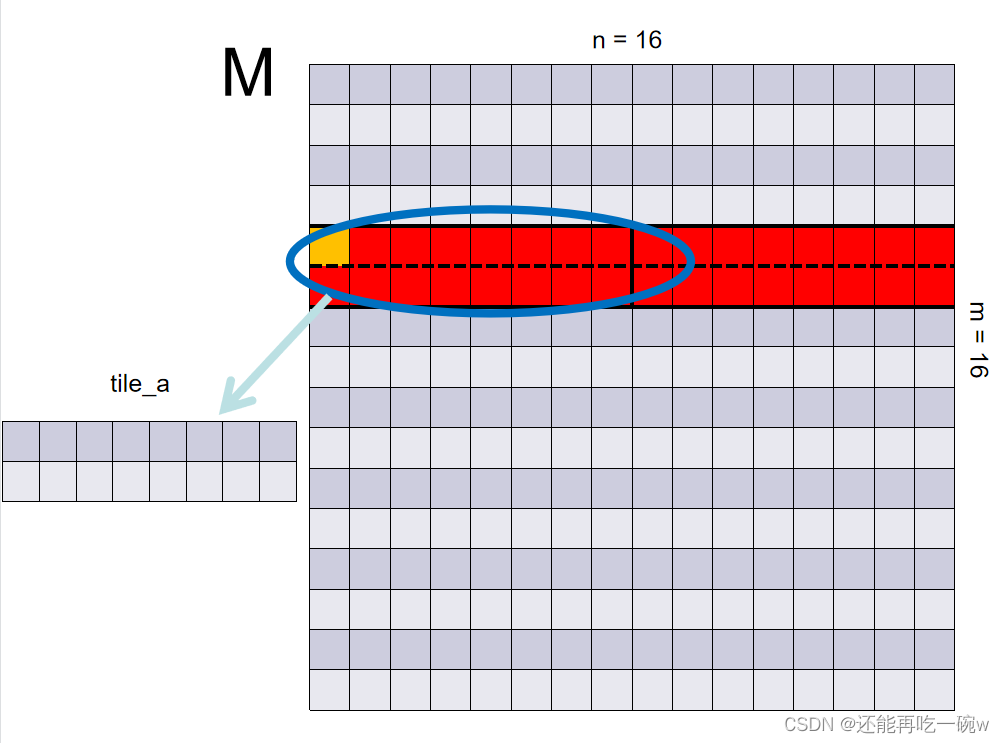
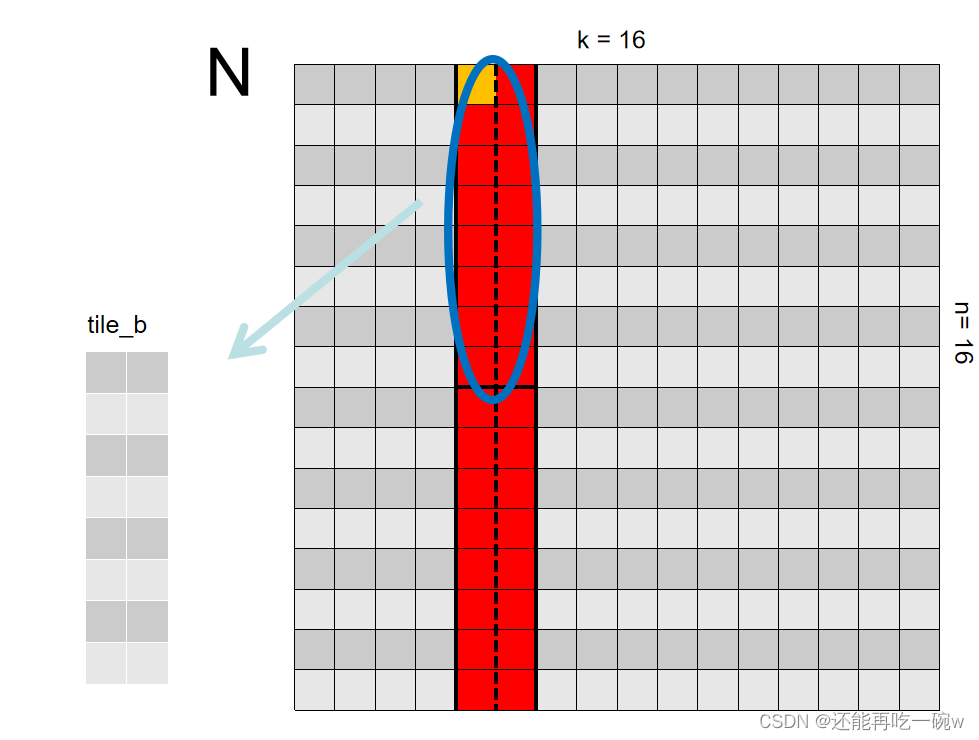
可以考虑一下,同样为上一篇博客中所举得1616的C = MN的矩阵例子,对应于矩阵M的Shared memory一直是沿着行来滑动,而对应于矩阵N的shared memory一直是沿着列来滑动,如果将对应于矩阵M的Shared memory的形状从正方形改为行数较小而列数较大的形状,对应于矩阵N的shared memory改为列数较小而行数较大的情况,将大大减少滑块滑动的次数,可以减少核函数的运行时间,从而提高矩阵乘法的执行速度。
代码部分
#include <stdio.h>
#include <math.h>
#include "error.cuh"
#define BLOCK_SIZE 32
__global__ void gpu_matrix_mult_shared(int *d_a, int *d_b, int *d_result, int m, int n, int k){
__shared__ int tile_a[BLOCK_SIZE][BLOCK_SIZE];
__shared__ int tile_b[BLOCK_SIZE][BLOCK_SIZE];
int row = blockIdx.y * BLOCK_SIZE + threadIdx.y;
int col = blockIdx.x * BLOCK_SIZE + threadIdx.x;
int tmp = 0;
int idx;
for(int sub = 0; sub <= n/BLOCK_SIZE; ++sub){
idx = row * n + sub * BLOCK_SIZE + threadIdx.x;
tile_a[threadIdx.y][threadIdx.x] = row < m &&(sub * BLOCK_SIZE + threadIdx.x)<n?d_a[idx]:0;
idx = (sub * BLOCK_SIZE + threadIdx.y) * k + col;
tile_b[threadIdx.y][threadIdx.x] = col<k && (sub * BLOCK_SIZE + threadIdx.y)<n? d_b[idx]:0;
__syncthreads();
for(int i = 0; i < BLOCK_SIZE; ++i){
tmp+= tile_a[threadIdx.y][i] * tile_b[i][threadIdx.x];
}
__syncthreads();
}
if(row < m && col < k){
d_result[row * k + col] = tmp;
}
}
__global__ void gpu_matrix_mult_test(int *a, int *b, int *c, int m, int n, int k){
__shared__ int tile_a[BLOCK_SIZE/2][BLOCK_SIZE*2];
__shared__ int tile_b[BLOCK_SIZE*2][BLOCK_SIZE/2];
int row = blockIdx.y * blockDim.y + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
int tmp = 0;
int idx1, idx2,idx3, idx4;
for(int sub = 0; sub<= n/BLOCK_SIZE/2; ++sub){
idx1 = row * n + sub * BLOCK_SIZE*2 + threadIdx.x;
idx2 = row * n + sub * BLOCK_SIZE*2 + BLOCK_SIZE/2 + threadIdx.x;
idx3 = row * n + sub * BLOCK_SIZE*2 + BLOCK_SIZE + threadIdx.x;
idx4 = row * n + sub * BLOCK_SIZE*2 + BLOCK_SIZE*3/2 + threadIdx.x;
tile_a[threadIdx.y][threadIdx.x] = row < m &&(sub * BLOCK_SIZE*2 + threadIdx.x)<n?a[idx1]:0;
tile_a[threadIdx.y][threadIdx.x + BLOCK_SIZE/2] = row < m &&(sub * BLOCK_SIZE*2 + BLOCK_SIZE/2 + threadIdx.x)<n?a[idx2]:0;
tile_a[threadIdx.y][threadIdx.x + BLOCK_SIZE] = row < m &&(sub * BLOCK_SIZE*2 + BLOCK_SIZE + threadIdx.x)<n?a[idx3]:0;
tile_a[threadIdx.y][threadIdx.x + BLOCK_SIZE*3/2] = row < m &&(sub * BLOCK_SIZE*2 + BLOCK_SIZE*3/2 + threadIdx.x)<n?a[idx4]:0;
idx1 = (sub * BLOCK_SIZE*2 + threadIdx.y) * k + col;
idx2 = (sub * BLOCK_SIZE*2 + BLOCK_SIZE/2 + threadIdx.y) * k + col;
idx3 = (sub * BLOCK_SIZE*2 + BLOCK_SIZE + threadIdx.y) * k + col;
idx4 = (sub * BLOCK_SIZE*2 + BLOCK_SIZE*3/2 + threadIdx.y) * k + col;
tile_b[threadIdx.y][threadIdx.x] = col<k && (sub * BLOCK_SIZE*2 + threadIdx.y)<n? b[idx1]:0;
tile_b[threadIdx.y + BLOCK_SIZE/2][threadIdx.x] = col<k && (sub * BLOCK_SIZE*2 + BLOCK_SIZE/2 + threadIdx.y)<n? b[idx2]:0;
tile_b[threadIdx.y + BLOCK_SIZE][threadIdx.x] = col<k && (sub * BLOCK_SIZE*2 + BLOCK_SIZE + threadIdx.y)<n? b[idx3]:0;
tile_b[threadIdx.y + BLOCK_SIZE*3/2][threadIdx.x] = col<k && (sub * BLOCK_SIZE*2 + BLOCK_SIZE*3/2 + threadIdx.y)<n? b[idx4]:0;
__syncthreads();
for(int i = 0; i < BLOCK_SIZE*2; ++i){
tmp+= tile_a[threadIdx.y][i] * tile_b[i][threadIdx.x];
}
__syncthreads();
}
if(row < m && col < k){
c[row * k + col] = tmp;
}
}
int main(int argc, char const *argv[])
{
int m=1600;
int n=1007;
int k=1600;
int *h_a, *h_b, *h_c, *h_cc, *h_cs;
CHECK(cudaMallocHost((void **) &h_a, sizeof(int)*m*n));
CHECK(cudaMallocHost((void **) &h_b, sizeof(int)*n*k));
CHECK(cudaMallocHost((void **) &h_c, sizeof(int)*m*k));
CHECK(cudaMallocHost((void **) &h_cc, sizeof(int)*m*k));
CHECK(cudaMallocHost((void **) &h_cs, sizeof(int)*m*k));
for (int i = 0; i < m; ++i) {
for (int j = 0; j < n; ++j) {
h_a[i * n + j] = 3;
}
}
for (int i = 0; i < n; ++i) {
for (int j = 0; j < k; ++j) {
h_b[i * k + j] =2;
}
}
int *d_a, *d_b, *d_c, *d_c_share;
CHECK(cudaMalloc((void **) &d_a, sizeof(int)*m*n));
CHECK(cudaMalloc((void **) &d_b, sizeof(int)*n*k));
CHECK(cudaMalloc((void **) &d_c, sizeof(int)*m*k));
CHECK(cudaMalloc((void **) &d_c_share, sizeof(int)*m*k));
cudaEvent_t start, stop,stop_share;
CHECK(cudaEventCreate(&start));
CHECK(cudaEventCreate(&stop));
CHECK(cudaEventCreate(&stop_share));
CHECK(cudaMemcpy(d_a, h_a, sizeof(int)*m*n, cudaMemcpyHostToDevice));
CHECK(cudaMemcpy(d_b, h_b, sizeof(int)*n*k, cudaMemcpyHostToDevice));
CHECK(cudaEventRecord(start));
//cudaEventQuery(start);
unsigned int grid_rows2 = (m + BLOCK_SIZE - 1) / BLOCK_SIZE;
unsigned int grid_cols2 = (k + BLOCK_SIZE - 1) / BLOCK_SIZE;
dim3 dimGrid2(grid_cols2, grid_rows2);
dim3 dimBlock2(BLOCK_SIZE, BLOCK_SIZE);
gpu_matrix_mult_shared<<<dimGrid2, dimBlock2>>>(d_a, d_b, d_c_share, m,n,k);
CHECK(cudaMemcpy(h_cs, d_c_share, (sizeof(int)*m*k), cudaMemcpyDeviceToHost));
CHECK(cudaEventRecord(stop));
CHECK(cudaEventSynchronize(stop));
unsigned int grid_rows1 = (m + BLOCK_SIZE - 1) / (BLOCK_SIZE / 2);
unsigned int grid_cols1 = (k + BLOCK_SIZE - 1) / (BLOCK_SIZE / 2);
dim3 dimGrid1(grid_cols1, grid_rows1);
dim3 dimBlock1(BLOCK_SIZE/2, BLOCK_SIZE/2);
gpu_matrix_mult_test<<<dimGrid1, dimBlock1>>>(d_a, d_b, d_c, m, n, k);
CHECK(cudaMemcpy(h_c, d_c, (sizeof(int)*m*k), cudaMemcpyDeviceToHost));
CHECK(cudaEventRecord(stop_share));
CHECK(cudaEventSynchronize(stop_share));
float elapsed_time, elapsed_time_share;
CHECK(cudaEventElapsedTime(&elapsed_time,start,stop));
CHECK(cudaEventElapsedTime(&elapsed_time_share, stop, stop_share));
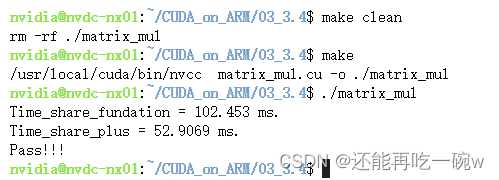
printf("Time = %g ms.\n", elapsed_time);
printf("Time_share = %g ms.\n", elapsed_time_share);
CHECK(cudaEventDestroy(start));
CHECK(cudaEventDestroy(stop));
CHECK(cudaEventDestroy(stop_share));
int ok = 1;
for (int i = 0; i < m; ++i)
{
for (int j = 0; j < k; ++j)
{
if(fabs(h_cs[i*k + j] - h_c[i*k + j])>(1.0e-10))
{
ok = 0;
}
}
}
if(ok)
{
printf("Pass!!!\n");
}
else
{
printf("Error!!!\n");
}
// free memory
CHECK(cudaFree(d_a));
CHECK(cudaFree(d_b));
CHECK(cudaFree(d_c));
CHECK(cudaFree(d_c_share));
CHECK(cudaFreeHost(h_a));
CHECK(cudaFreeHost(h_b));
CHECK(cudaFreeHost(h_c));
CHECK(cudaFreeHost(h_cc));
CHECK(cudaFreeHost(h_cs));
return 0;
}
讲解部分
为了保证同样的对比,在基础版优化时申请的Shared Memory大小和形状为[BLOCK_SIZE][BLOCK_SIZE],而进一步优化时,保证申请的Shared Memory大小不变,仅改变其形状,所以对应于矩阵M 的Shared Memory的形状为[BLOCK_SIZE/2][BLOCK_SIZE2],矩阵N 的Shared Memory的形状为[BLOCK_SIZE2][BLOCK_SIZE/2]。例如,在上一篇博客中将shared memory统一设定为44,在本篇中则分别设定为28和8*2。
__shared__ int tile_a[BLOCK_SIZE/2][BLOCK_SIZE*2];
__shared__ int tile_b[BLOCK_SIZE*2][BLOCK_SIZE/2];
由于每个block对应其每块矩阵元素的求解,而将申请的shared memory尺寸改变,所得到的block尺寸也将发生改变,因此,block尺寸也变为[BLOCK_SIZE/2][BLOCK_SIZE/2],为了保证线程数与所求矩阵C元素一一对应,因此还需要改变grid的大小。
unsigned int grid_rows1 = (m + BLOCK_SIZE - 1) / (BLOCK_SIZE / 2);
unsigned int grid_cols1 = (k + BLOCK_SIZE - 1) / (BLOCK_SIZE / 2);
dim3 dimGrid1(grid_cols1, grid_rows1);
dim3 dimBlock1(BLOCK_SIZE/2, BLOCK_SIZE/2);
gpu_matrix_mult_test<<<dimGrid1, dimBlock1>>>(d_a, d_b, d_c, m, n, k);
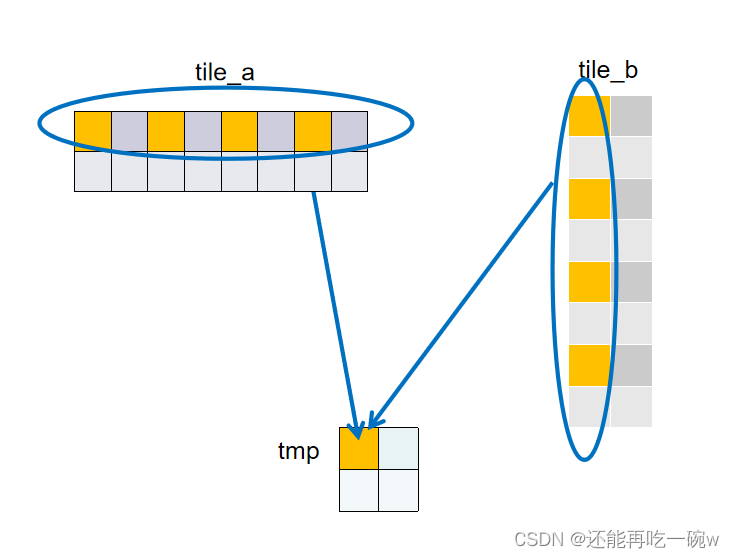
因为block的大小改变,因此在核函数中,无法一一对应为shared memory提取到对应矩阵的值,如上图所示,block大小为22,shared memory大小为8.2和28时,同一时间每个block需要为4个shared memory地址赋值。
idx1 = row * n + sub * BLOCK_SIZE*2 + threadIdx.x;
idx2 = row * n + sub * BLOCK_SIZE*2 + BLOCK_SIZE/2 + threadIdx.x;
idx3 = row * n + sub * BLOCK_SIZE*2 + BLOCK_SIZE + threadIdx.x;
idx4 = row * n + sub * BLOCK_SIZE*2 + BLOCK_SIZE*3/2 + threadIdx.x;
tile_a[threadIdx.y][threadIdx.x] = row < m &&(sub * BLOCK_SIZE*2 + threadIdx.x)<n?a[idx1]:0;
tile_a[threadIdx.y][threadIdx.x + BLOCK_SIZE/2] = row < m &&(sub * BLOCK_SIZE*2 + BLOCK_SIZE/2 + threadIdx.x)<n?a[idx2]:0;
tile_a[threadIdx.y][threadIdx.x + BLOCK_SIZE] = row < m &&(sub * BLOCK_SIZE*2 + BLOCK_SIZE + threadIdx.x)<n?a[idx3]:0;
tile_a[threadIdx.y][threadIdx.x + BLOCK_SIZE*3/2] = row < m &&(sub * BLOCK_SIZE*2 + BLOCK_SIZE*3/2 + threadIdx.x)<n?a[idx4]:0;
idx1 = (sub * BLOCK_SIZE*2 + threadIdx.y) * k + col;
idx2 = (sub * BLOCK_SIZE*2 + BLOCK_SIZE/2 + threadIdx.y) * k + col;
idx3 = (sub * BLOCK_SIZE*2 + BLOCK_SIZE + threadIdx.y) * k + col;
idx4 = (sub * BLOCK_SIZE*2 + BLOCK_SIZE*3/2 + threadIdx.y) * k + col;
tile_b[threadIdx.y][threadIdx.x] = col<k && (sub * BLOCK_SIZE*2 + threadIdx.y)<n? b[idx1]:0;
tile_b[threadIdx.y + BLOCK_SIZE/2][threadIdx.x] = col<k && (sub * BLOCK_SIZE*2 + BLOCK_SIZE/2 + threadIdx.y)<n? b[idx2]:0;
tile_b[threadIdx.y + BLOCK_SIZE][threadIdx.x] = col<k && (sub * BLOCK_SIZE*2 + BLOCK_SIZE + threadIdx.y)<n? b[idx3]:0;
tile_b[threadIdx.y + BLOCK_SIZE*3/2][threadIdx.x] = col<k && (sub * BLOCK_SIZE*2 + BLOCK_SIZE*3/2 + threadIdx.y)<n? b[idx4]:0;
之后,按照上一篇博文的步骤进行对应相乘再相加,最后将每个线程对应的元素赋值到对应的输出矩阵即可。
实验结果比较

















 2222
2222

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









