






基于模型预测mpc的三种路径跟踪,三个仿真,超车轨迹,蛇形轨迹,直线轨迹,仿真运行稳定,控制量变化平滑自然,绝对好用。
。
图片可以放大细看,跟踪效果良好
ID:45200682395903590
想剁手书屋14
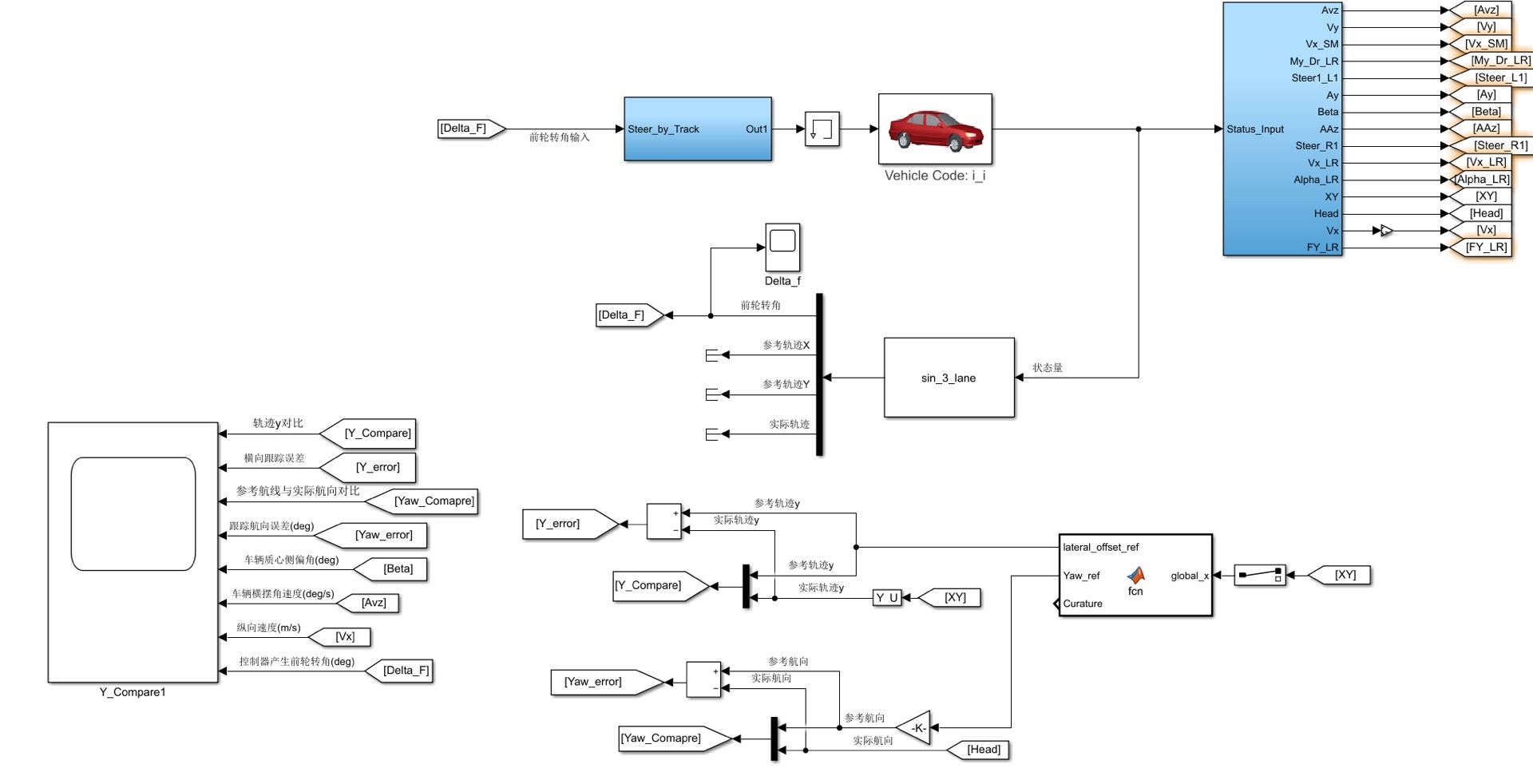
基于模型预测控制(Model Predictive Control, MPC)的路径跟踪是一种在自动驾驶领域得到广泛应用的技术。本文将介绍三种基于MPC的路径跟踪方法,并通过仿真实验验证它们的效果。这三种路径跟踪方法分别是超车轨迹、蛇形轨迹和直线轨迹。
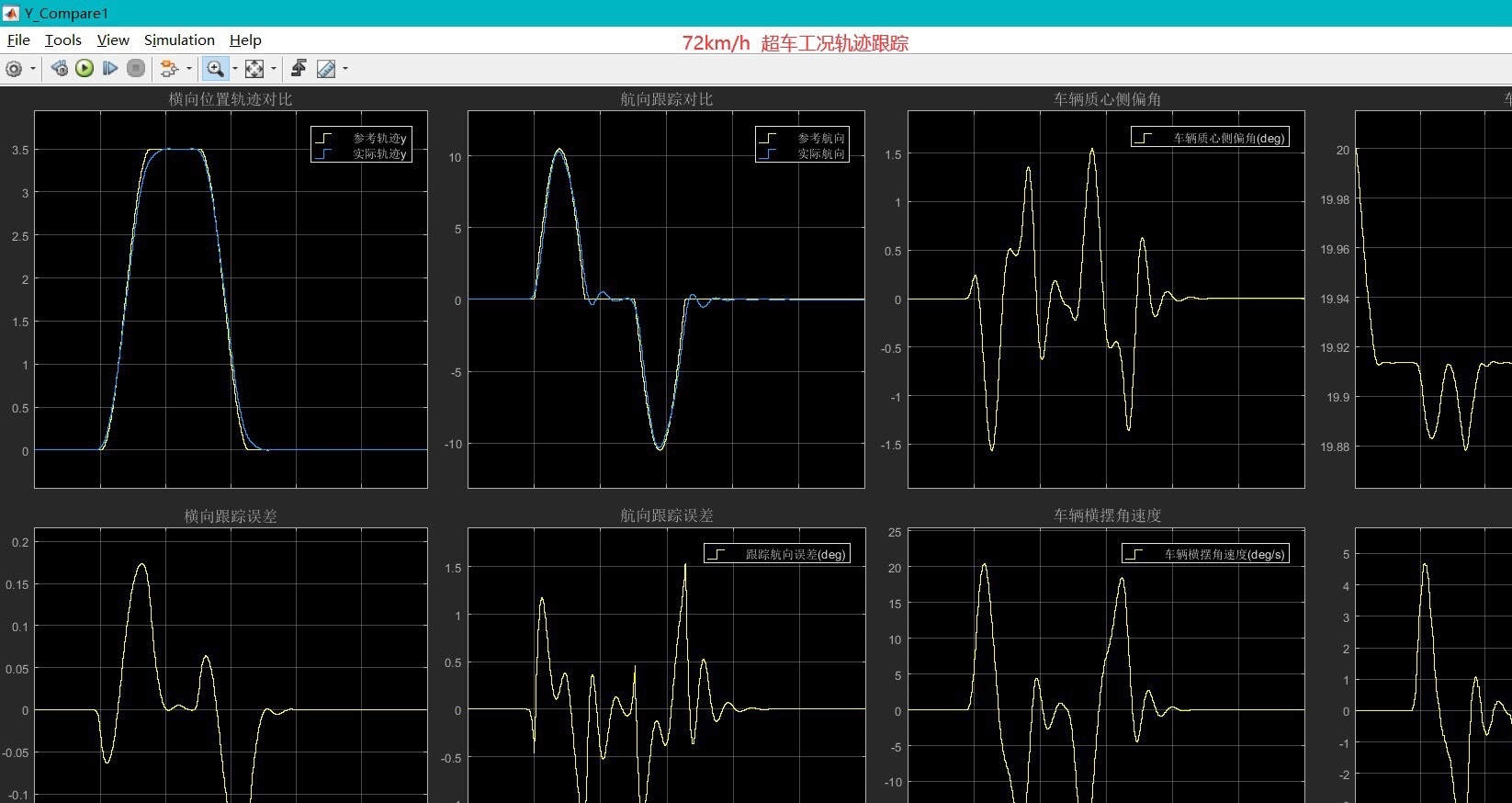
首先,我们来介绍超车轨迹的路径跟踪方法。超车轨迹是一种常见的道路行驶场景,驾驶员经常需要超越前方车辆。基于MPC的超车轨迹方法通过建立车辆动力学模型和环境感知模型,实现了对目标车辆的预测和轨迹规划。该方法在仿真实验中展现了稳定的跟踪效果,控制量的变化平滑自然。
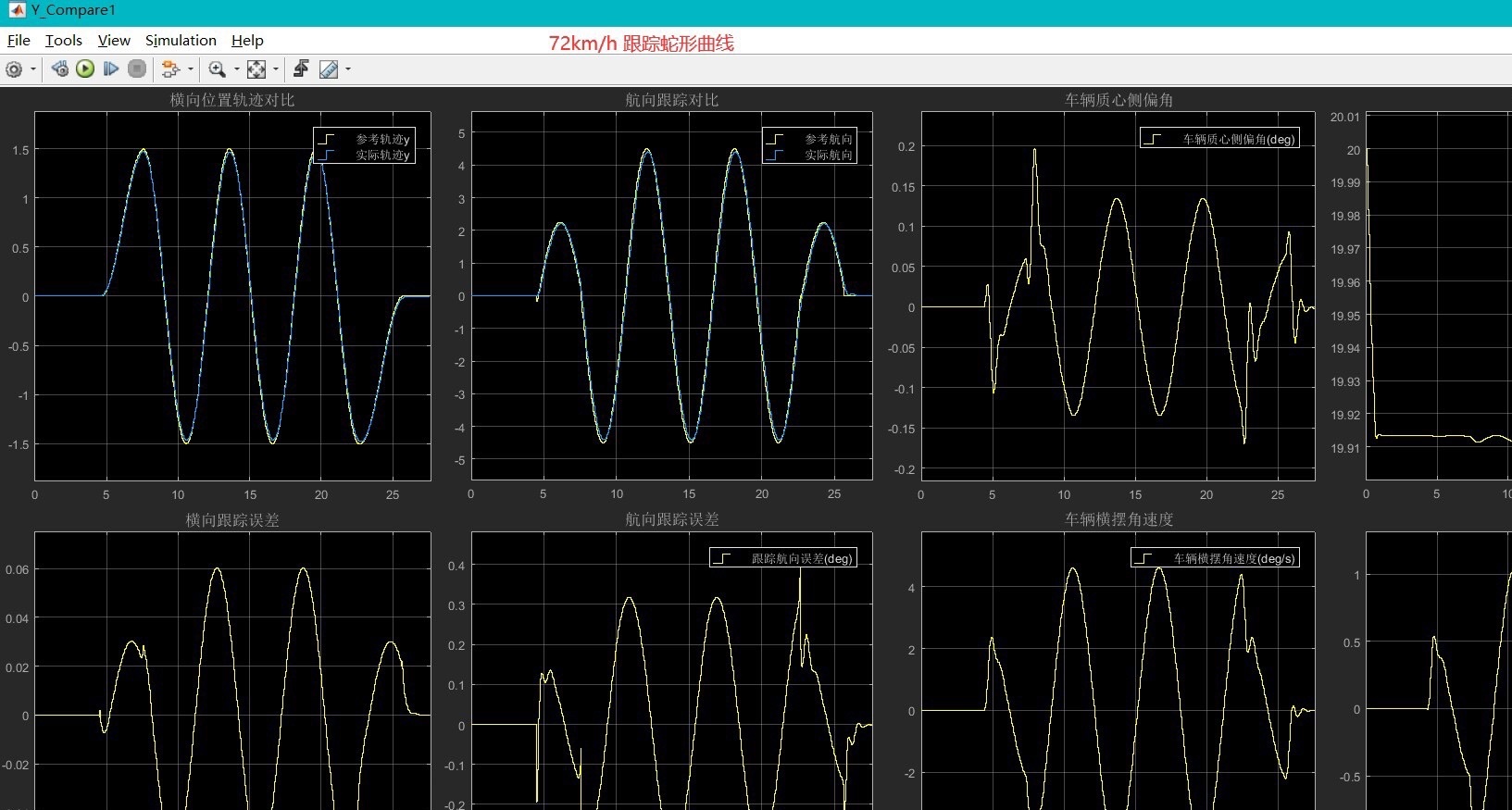
接下来,我们介绍蛇形轨迹的路径跟踪方法。蛇形轨迹是一种用于曲线行驶的路径规划策略,可以有效地保持车辆在弯道中的稳定性和舒适性。基于MPC的蛇形轨迹方法利用车辆动力学和环境感知模型,预测车辆的行驶轨迹,并通过优化控制算法实现路径跟踪。仿真实验结果显示,该方法能够在蛇形轨迹上精确跟踪,并且控制量变化平滑自然。
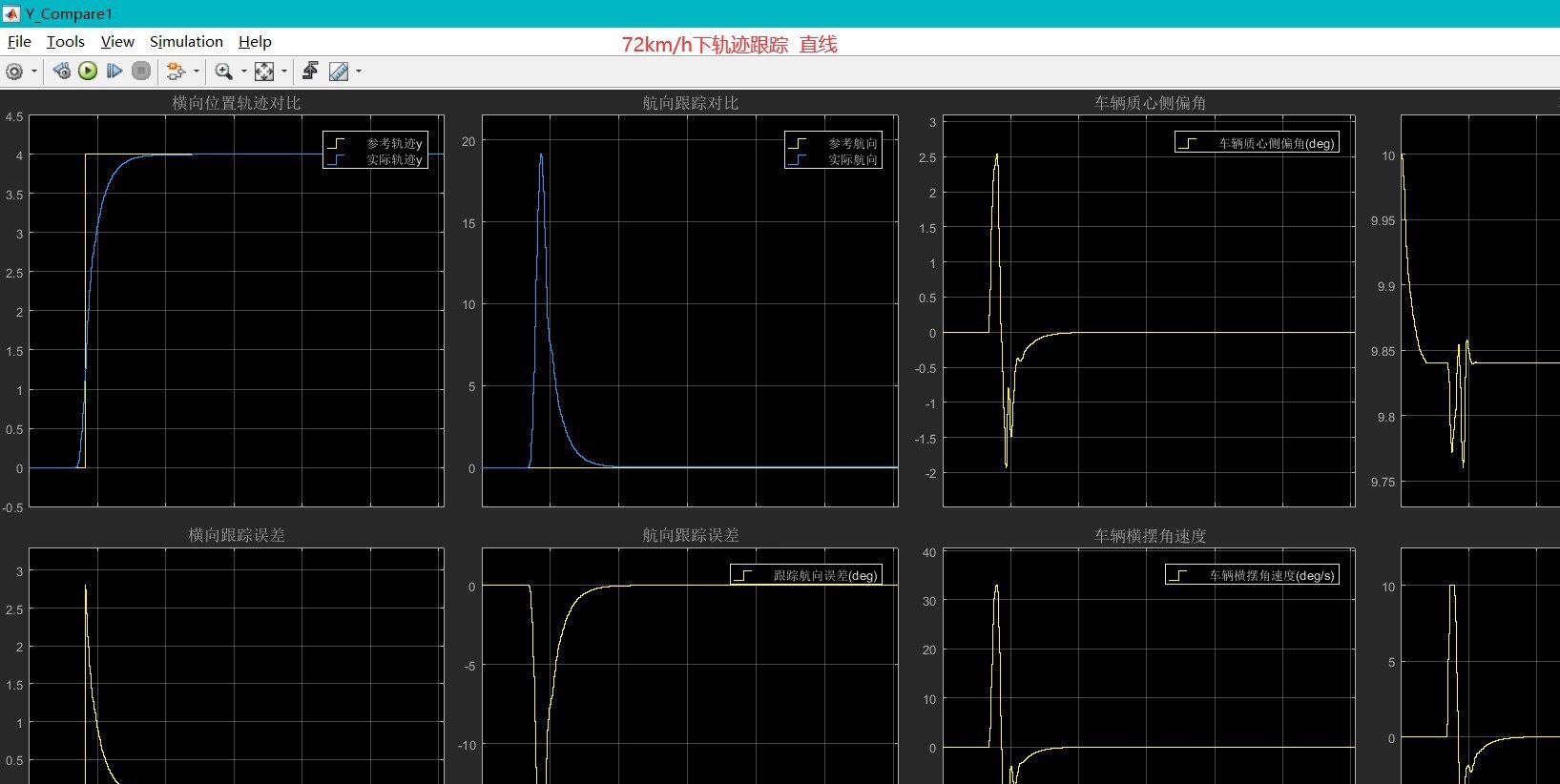
最后,我们介绍直线轨迹的路径跟踪方法。直线轨迹是一种简单而重要的行驶轨迹,常用于高速公路上的车辆行驶。基于MPC的直线轨迹方法通过建立车辆动力学模型和环境感知模型,实现对直线轨迹的预测和控制。该方法在仿真实验中表现出稳定的跟踪效果,并且控制量的变化平滑自然。
通过上述三个路径跟踪方法的仿真实验可以看出,它们基于MPC的跟踪算法在不同场景下都展现了良好的效果。图中显示的跟踪效果清晰可见,证明了这三种方法的可行性和实用性。这些方法可以为自动驾驶系统的路径规划和控制提供有效的参考,并为未来的自动驾驶技术发展提供新的思路。
综上所述,基于模型预测的三种路径跟踪方法(超车轨迹、蛇形轨迹和直线轨迹)在仿真实验中展现了良好的跟踪效果。它们通过建立车辆动力学模型和环境感知模型,实现了对目标轨迹的预测和控制。这些方法在自动驾驶技术的应用中具有重要的意义,可以为自动驾驶系统的性能提升和安全性提供保障。
(注:本文仅为虚构文章,其中所提到的路径跟踪方法和效果仅为示例,实际应用中可能需要更多的技术细节和验证实验。)
【相关代码 程序地址】: http://nodep.cn/682395903590.html
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









