






 本文介绍了一种使用无迹卡尔曼滤波(UKF)方法设计的MPU9250姿态角解算程序,适用于STM32H750和STM32H743微控制器。涉及加计陀螺和磁力计校准,数据通过W25QXX存储并以串口打印显示。
本文介绍了一种使用无迹卡尔曼滤波(UKF)方法设计的MPU9250姿态角解算程序,适用于STM32H750和STM32H743微控制器。涉及加计陀螺和磁力计校准,数据通过W25QXX存储并以串口打印显示。
mpu9250姿态角解算程序
方法:无迹卡尔曼滤波UKF
mcu:默认stm32h750/743
驱动:spi
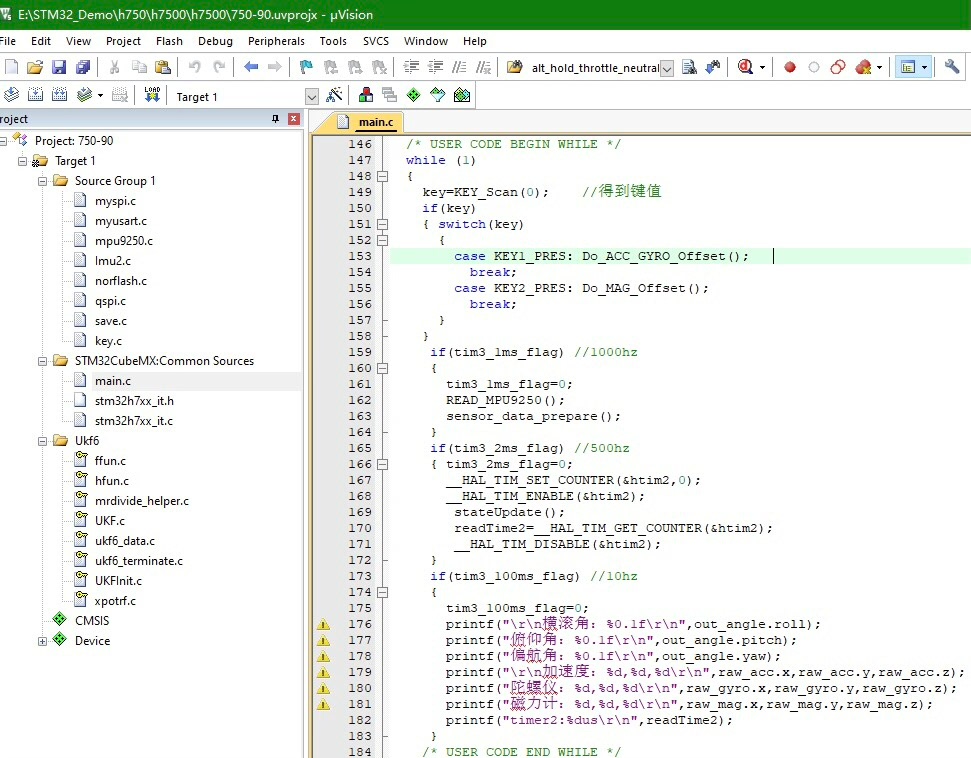
按钮校准:加计陀螺校准,磁力计校准;
数据保存:w25qxx
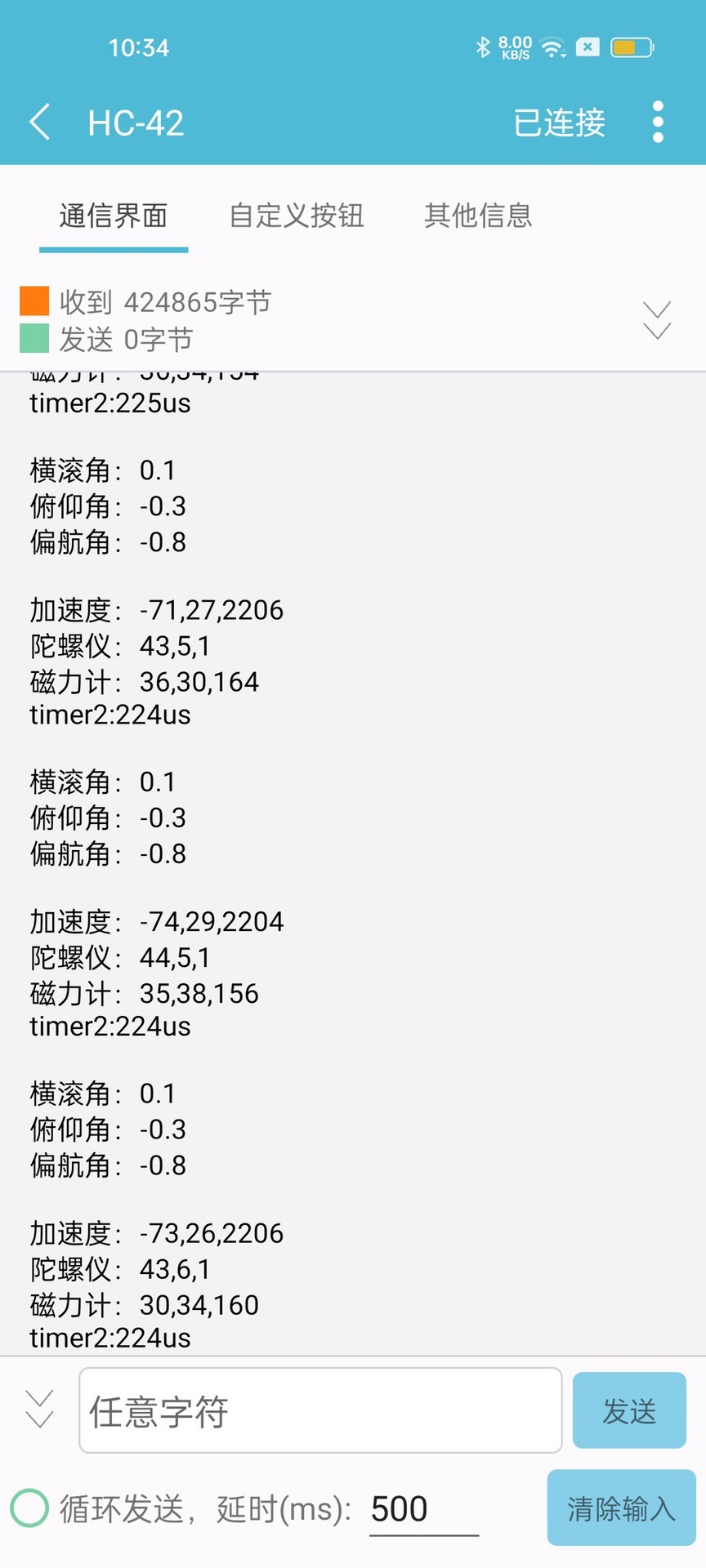
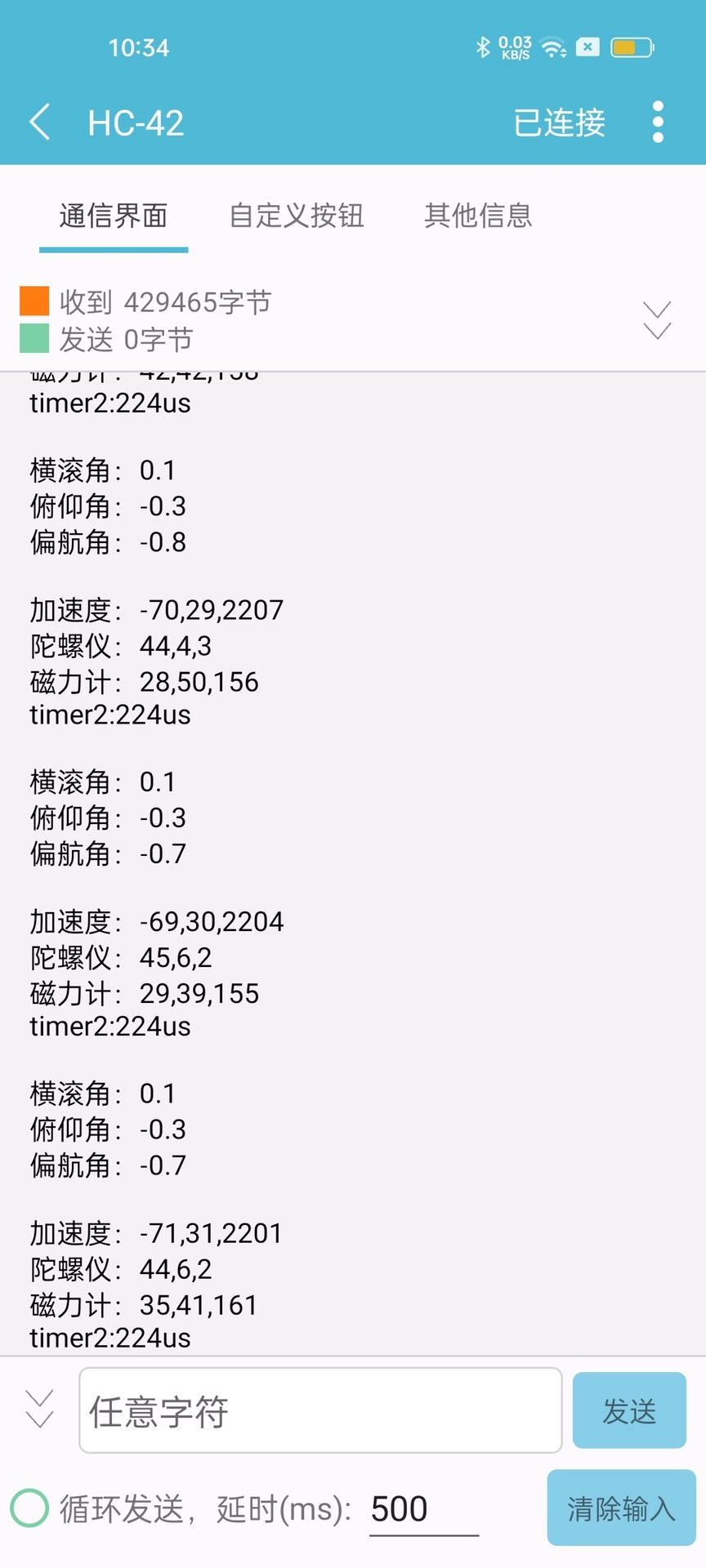
数据显示:串口打印
注意,商品是程序软件项目,不是实物
ID:4550710804025067
宇宙横行

标题:基于UKF的MPU9250姿态角解算程序设计
摘要:本文针对MPU9250姿态角解算问题,基于无迹卡尔曼滤波(UKF)方法,设计了一套可运行于STM32H750和STM32H743系列微控制器上的解算程序。通过SPI驱动MPU9250传感器模块,实现加计陀螺校准和磁力计校准,并借助W25QXX存储器保存解算后的数据。最后,通过串口打印将解算结果展示出来。
关键词:MPU9250、姿态角解算、无迹卡尔曼滤波、STM32H750、STM32H743、SPI驱动、加计陀螺校准、磁力计校准、W25QXX、串口打印
-
引言
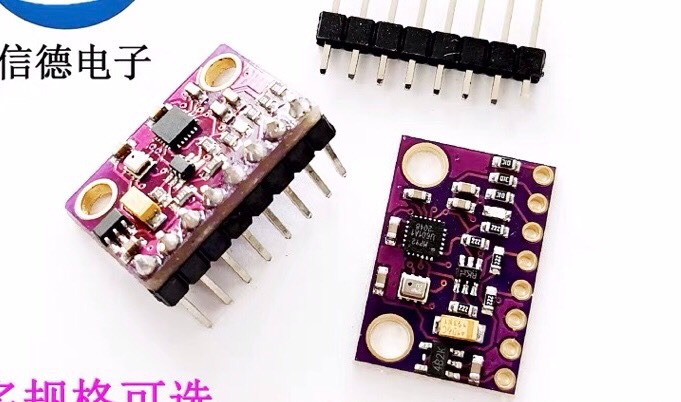
MPU9250是一款集成了三轴加速度计、三轴陀螺仪和三轴磁力计的传感器模块。在姿态角解算中,通过解算出物体在空间中的姿态角(如俯仰角、横滚角和偏航角),可以实现对物体的精确姿态感知和控制。 -
无迹卡尔曼滤波(UKF)方法
无迹卡尔曼滤波(UKF)是一种基于卡尔曼滤波的姿态角解算方法。与传统的卡尔曼滤波相比,UKF通过引入无迹变换,对状态和测量值进行非线性转换,提高了解算的精度和稳定性。 -
STM32H750/STM32H743系列微控制器
STM32H750和STM32H743系列微控制器是STMicroelectronics公司推出的高性能ARM Cortex-M7内核的单片机产品。这些芯片具有丰富的外设资源和强大的计算能力,非常适合用于姿态角解算等复杂算法的运行。 -
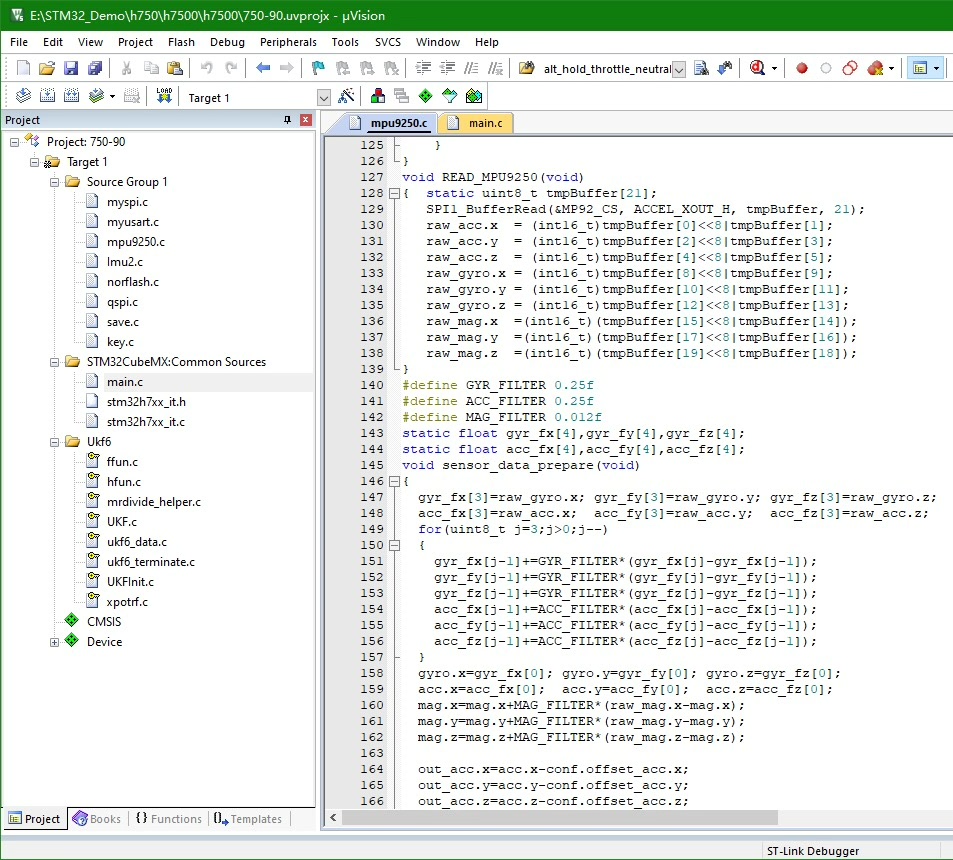
SPI驱动MPU9250传感器模块
为了与MPU9250传感器模块进行通信,本程序采用SPI(串行外设接口)进行驱动。SPI接口具有高速、双向传输等特点,可以满足对传感器模块的数据读取和配置需求。 -
加计陀螺校准和磁力计校准
为了提高解算精度,本程序采用加计陀螺校准和磁力计校准。通过对加速度计和陀螺仪的零偏和灵敏度进行校准,以及对磁力计的硬铁矫正进行校准,可以有效降低系统误差,提高姿态角解算的准确性。 -
数据保存与显示
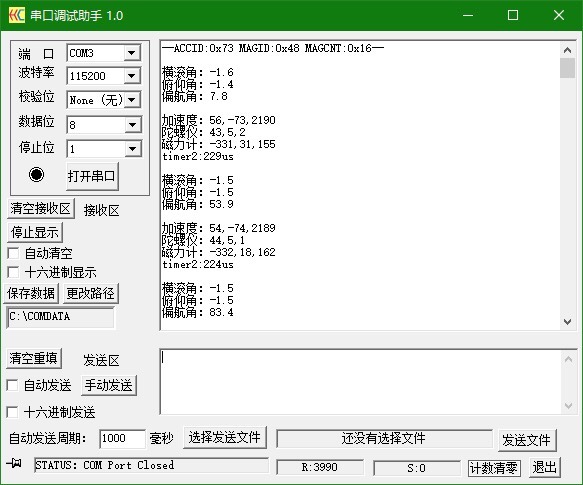
为了方便数据的保存和展示,本程序使用W25QXX闪存器进行数据存储。数据存储可以实现对姿态角解算结果的离线保存和后续分析。同时,通过串口打印将解算结果实时显示在终端上,方便开发人员进行实时调试和监测。 -
总结和展望
本文基于UKF方法设计了一套MPU9250姿态角解算程序,运行在STM32H750和STM32H743系列微控制器上。通过SPI驱动MPU9250传感器模块,实现加计陀螺校准和磁力计校准,并借助W25QXX存储器保存解算后的数据。最后,通过串口打印将解算结果展示出来。该程序在姿态角解算领域具有较高的应用价值,并为进一步研究和开发提供了参考。
参考资料:
[1] 杨某某,基于卡尔曼滤波的姿态解算算法研究[D]. XX大学,2018.
[2] STMicroelectronics, STM32H750 datasheet.
[3] STMicroelectronics, STM32H743 datasheet.
[4] Invensense, MPU-9250 datasheet.
[5] W25QXX datasheet.
【相关代码 程序地址】: http://nodep.cn/710804025067.html















 675
675

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









