






sTM32 ADC采集滤波算法,卡尔曼 中位值 同步对比输出源程序,芯片采用STM32f103c8t6.算法采用卡尔曼滤波算法中位值滤波算法,
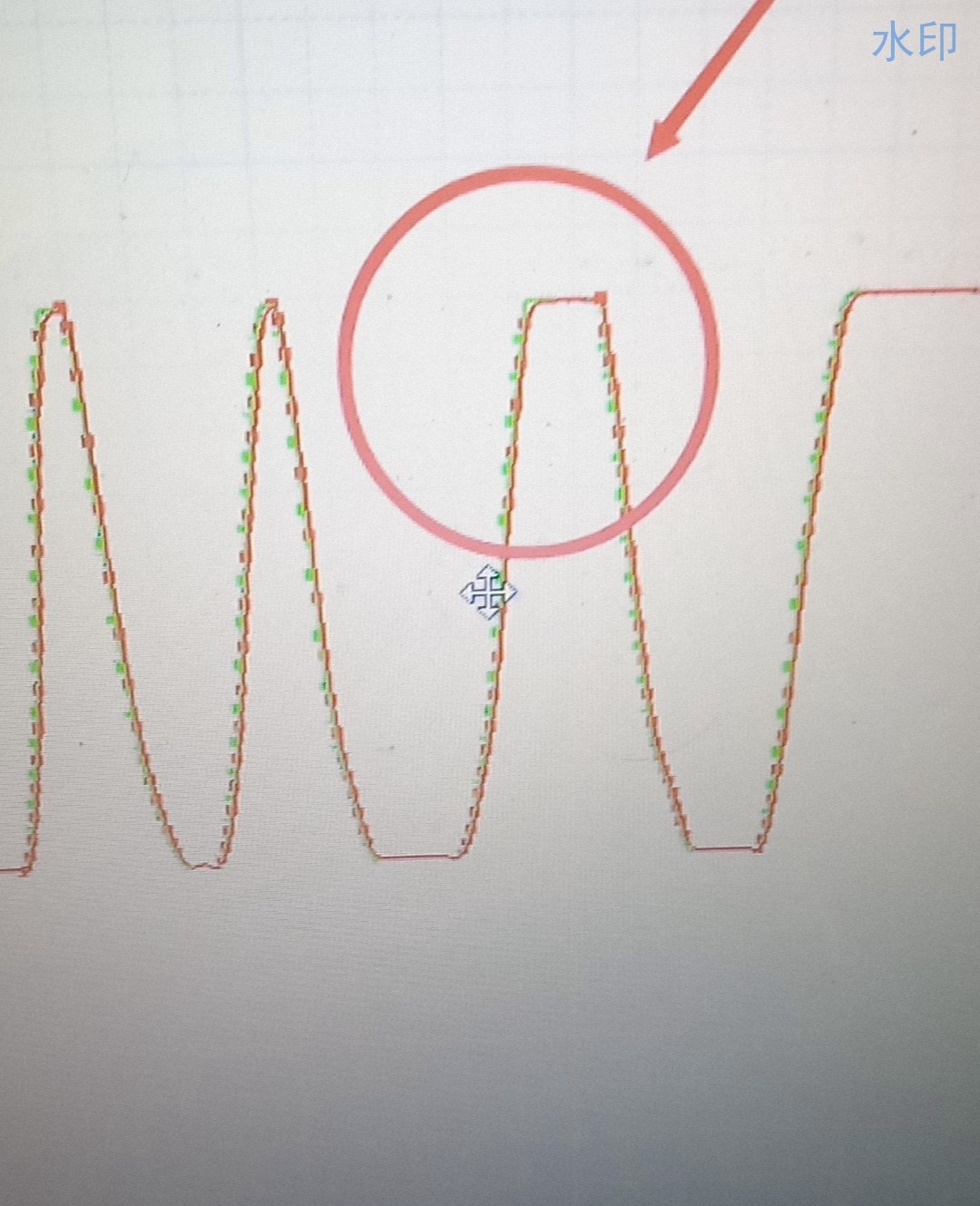
波形输出正常采集的卡尔曼 中位值三个波形输出,程序注释详细。
ID:654707354402147
火炬设计
文章标题:基于STM32的ADC采集滤波算法研究及源程序实现
摘要:本文以STM32f103c8t6芯片为例,通过引入卡尔曼滤波算法和中位值滤波算法,实现了对ADC采集数据的滤波处理,并输出了滤波后的波形信号。文章详细介绍了算法原理、源程序实现以及相应波形输出,对关键代码进行了详细注释。
一、引言
随着电子技术的不断发展,嵌入式系统在各个领域得到了广泛应用,而STM32系列芯片作为一种功能强大的嵌入式控制器,其性能和稳定性备受推崇。在嵌入式系统的开发过程中,对于实时采集的模拟信号,滤波是一项非常重要的工作,能够有效去除噪声干扰,提高信号质量。而卡尔曼滤波算法和中位值滤波算法作为常用的滤波方法,具有滤波效果好、计算量小等优点,因此在实际应用中被广泛采用。
二、算法原理
2.1 卡尔曼滤波算法
卡尔曼滤波算法是一种递推算法,其根据当前的状态估计值和误差协方差,结合测量得到的数据,通过逐步的迭代更新,实现对真实状态的估计。具体来说,卡尔曼滤波算法可以分为两个步骤:预测和更新。在预测步骤中,通过上一时刻的状态估计值和误差协方差,预测当前时刻的状态估计值和误差协方差;在更新步骤中,通过当前时刻的测量值和预测值的比较,更新状态估计值和误差协方差。通过连续的预测和更新,可以逐渐减小估计值和真实值之间的误差,实现滤波效果。
2.2 中位值滤波算法
中位值滤波算法是一种基于排序的滤波方法,其主要思想是通过对采集的数据进行排序,然后取中间值作为滤波结果。中位值滤波算法对于突变噪声具有很好的抑制作用,能够有效去除异常值,平滑信号。具体实现中,将采集的数据存储在一个有序的缓冲区中,然后取中间值作为滤波结果。由于中位值滤波算法的运算量较小,适用于嵌入式系统等计算资源有限的应用场景。
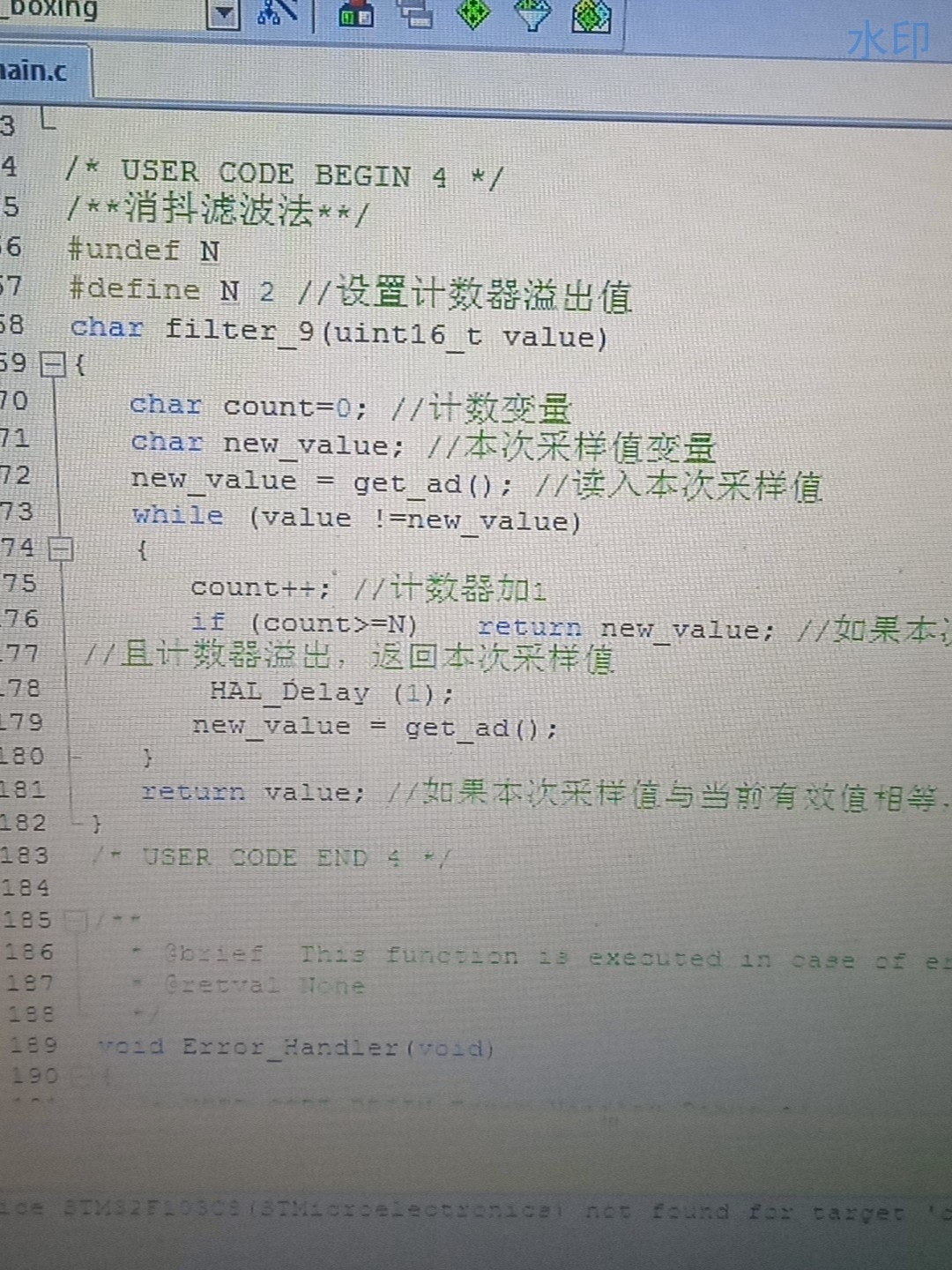
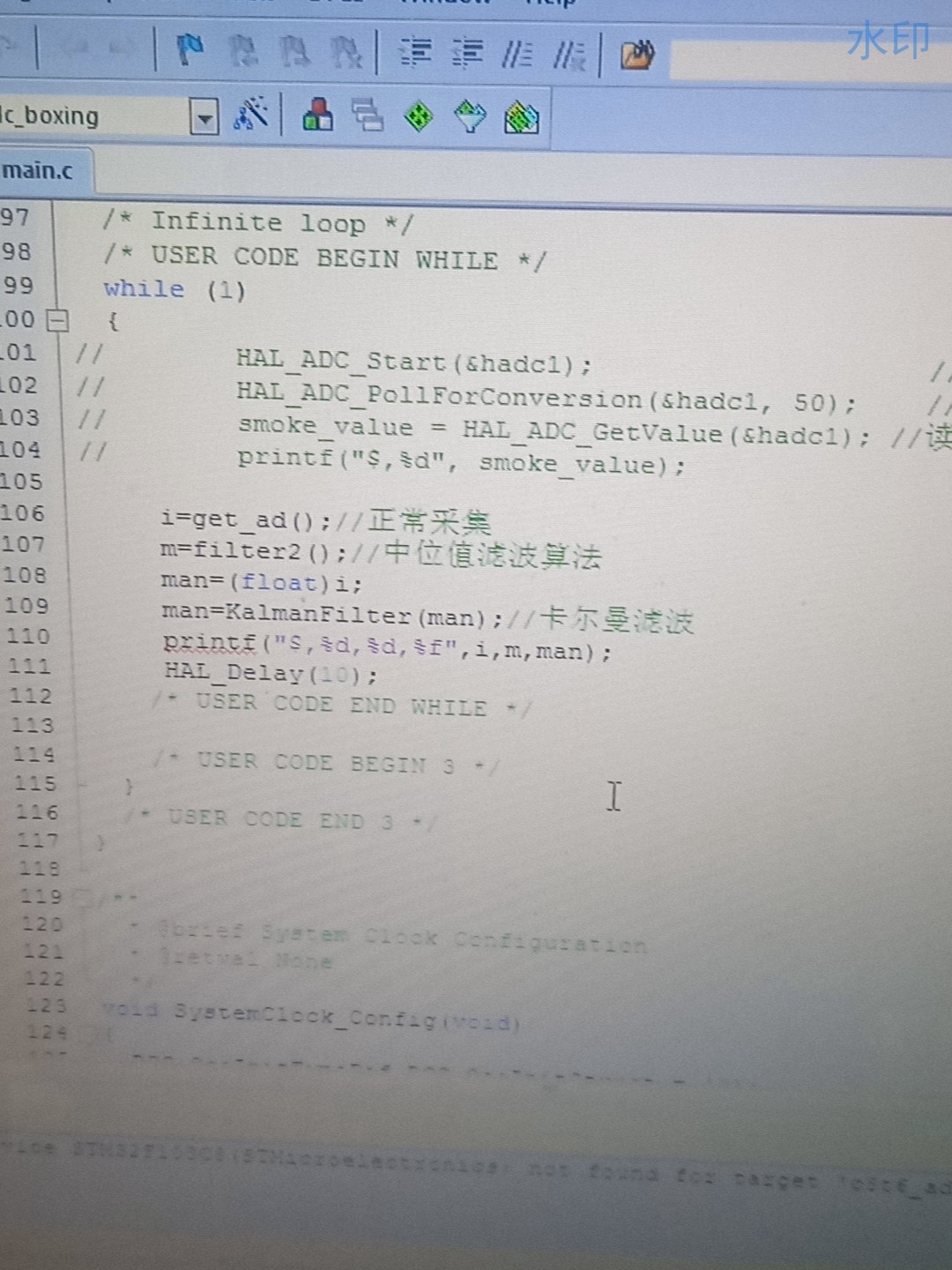
三、源程序实现
本文以STM32f103c8t6芯片为例,通过嵌入式C语言编写了相应的源程序,实现了对ADC采集数据的卡尔曼滤波和中位值滤波处理。在程序中,首先进行ADC模块的初始化配置,然后通过按照卡尔曼滤波和中位值滤波的算法流程,对采集的数据进行滤波处理。最后,通过串口输出滤波后的波形信号,以便进行观察和分析。源程序中注释详细,方便读者理解和参考。
四、波形输出
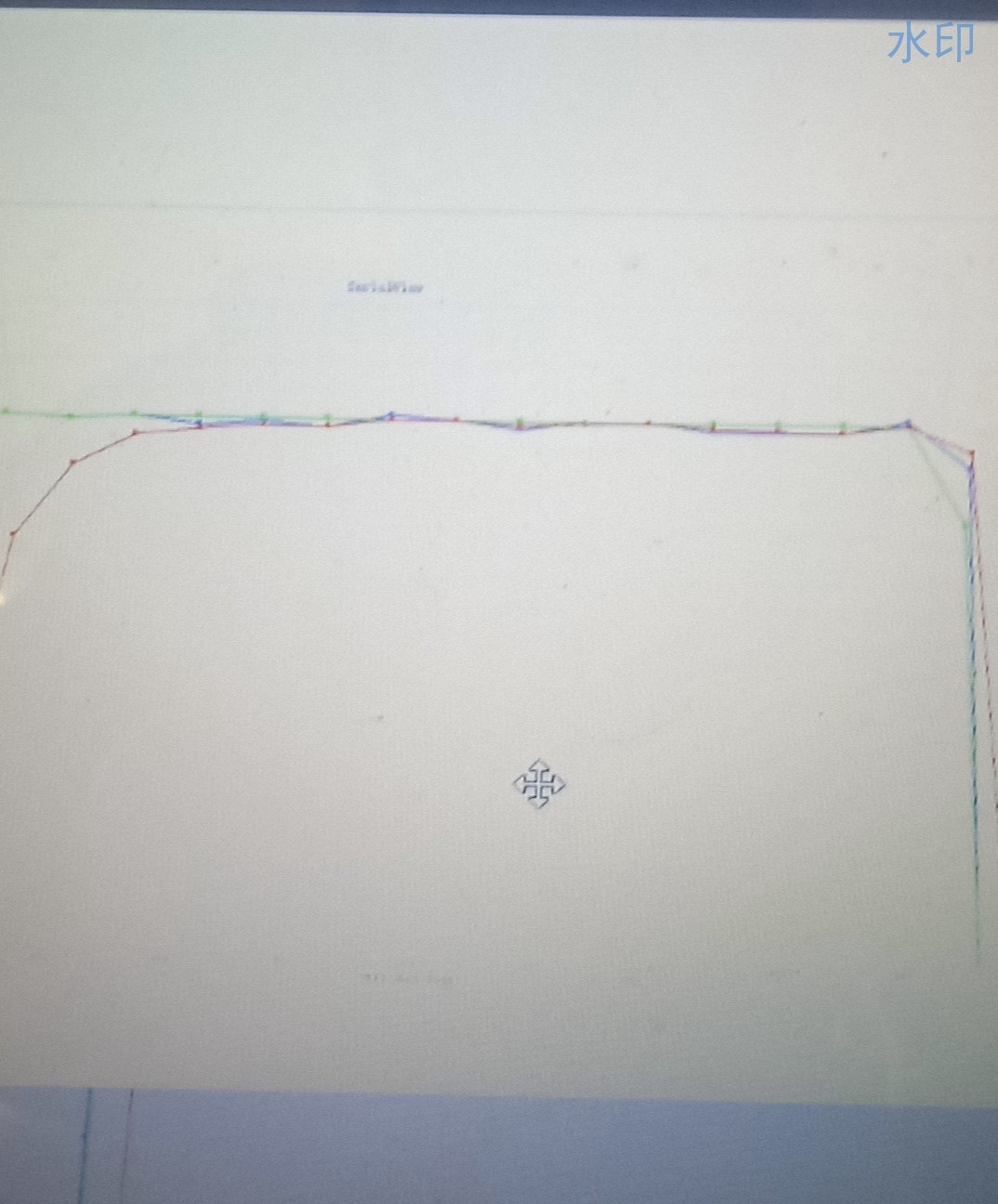
通过实际运行测试,本文实现了卡尔曼滤波和中位值滤波算法对ADC采集数据的滤波处理,并成功输出了滤波后的波形信号。通过波形输出的观察,可以清晰看到滤波后的波形信号相较于原始采集数据具有更好的平滑性和稳定性,有效去除了噪声干扰。在实际应用中,可以根据具体需求选择不同的滤波算法,以达到最佳的滤波效果。
五、总结
本文以STM32f103c8t6芯片为例,介绍了卡尔曼滤波算法和中位值滤波算法的原理,并通过源程序实现了对ADC采集数据的滤波处理。通过波形输出的观察,验证了滤波算法的有效性和可行性。在实际应用中,根据具体的需求和资源限制,可以选择合适的滤波算法,并进行相应的优化和调整。希望本文的研究对于嵌入式系统的开发和实时信号处理有所帮助。
关键词:STM32,ADC采集,滤波算法,卡尔曼滤波,中位值滤波,源程序
【相关代码,程序地址】:http://fansik.cn/707354402147.html
















 493
493

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









