







9月19日,华为2019年度旗舰Mate30系列手机在德国慕尼黑正式发布。

许久不关注手机产品,对里面的一些参数都有些陌生了,整理一下记录下来,也算给自己科普。1
1. 磁悬发声技术
磁悬屏幕发声,告别物理听筒 华为P30 Pro搭载磁悬发声屏,手机屏幕即为听筒,无需在中框开孔,可以实现超窄边框。通话声音由屏幕振动产生,与此同时,屏幕振动还将声音通过骨传导传递到耳朵。传统听筒是通过音膜推动前后空气发声,而屏幕发声技术是通过屏幕振动推动屏幕前后空气发声。
总结一下屏幕发声的优势:
①屏幕不开孔,优化整机防尘防水设计;
② 屏幕无听筒开孔,呈现出更完美的全面屏设计;
③ 利用整个屏幕发声,还原听筒的通话质感。
④ 拥有超大的聆听区域,听音面积更广,同时声音聚焦屏幕中心
(iphone 三个孔:摄像头 光学感应孔 距离感应孔)
2. 取消实体按键,侧边双击音量调节。
3. 1080P分辨率的OLED屏幕
1080p是一种视频显示格式,外语字母P意为逐行扫描(Progressive scan),有别于1080i的隔行扫描(interlaced scan)。数字1080则表示垂直方向有1080条水平扫描线。通常1080p的画面分辨率为1920×1080。数字1080则表示垂直方向有1080条水平扫描线。
1080是全高清 1920*1080,2K是2560*1440 是720P(分辨率是1280 X 720)的4倍,4K是3840*2160 是1080P的4倍。
Mate30 pro多了侧边显示,分辨率略高
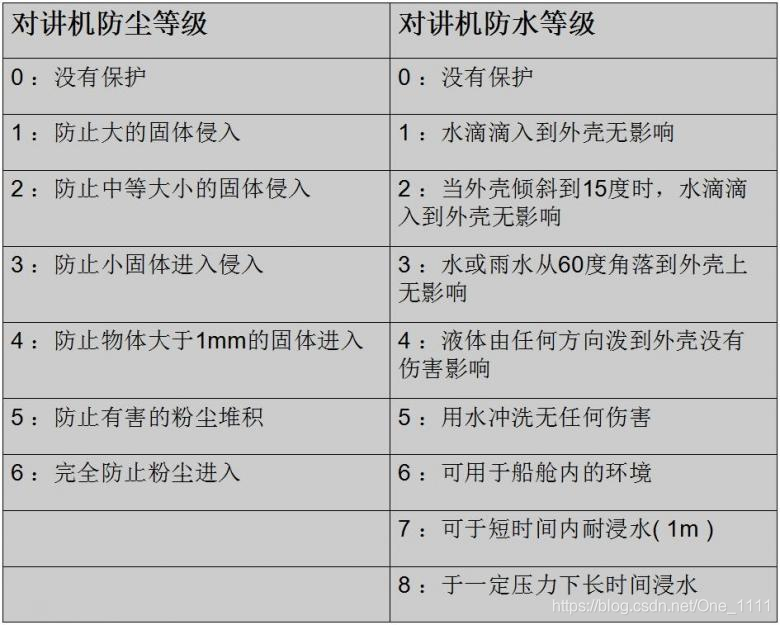
4. Mate30 支持IP57级别防尘防水,Pro达到了IP68级别
IP后面跟了2位数字,第1个是固态防护等级,范围是0-6,分别表示对从大颗粒异物到灰尘的防护;第2个是液态防护等级,范围是0-8,分别表示对从垂直水滴到水底压力情况下的防护。数字越大表示能力越强。

5. 全新990芯片,7纳米EUV级紫外光刻工艺
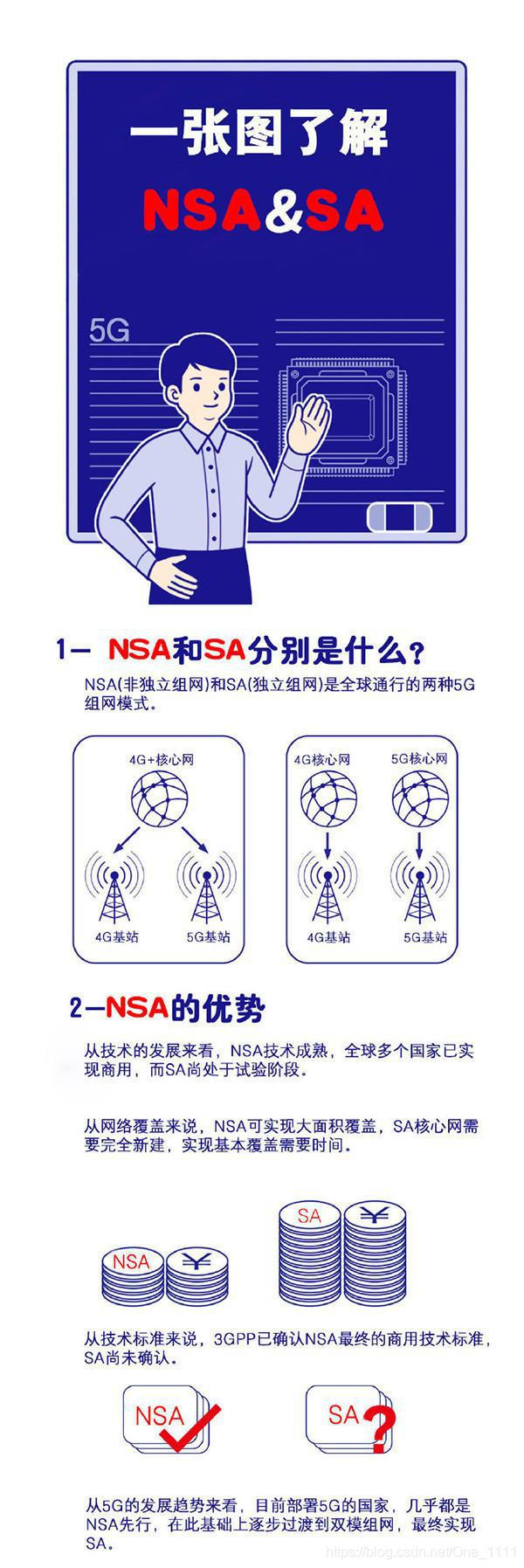
6. 5G NSA&SA SoC
NSA(非独立组网)和SA(独立组网)是全球通行的两种5G组网模式。从技术的发展来看,NSA技术要更成熟一些,已在全球多个国家实现商用,而SA尚处于实验阶段;从网络覆盖来说,NSA可以实现大面积覆盖,SA则需要完全重新建立,需要一些时间才能实现完全覆盖;从技术标准来说,NSA是最终的商用技术标准,SA尚未确认;从5G发展的趋势来看,目前部署5G的国家,几乎都是NSA先行,并在此基础上逐渐实现SA。
截止今年5月,全球推出的50多款5G终端中,大多是NSA单模;NSA手机不可以更换或升级为SA,但不影响在NSA 5G网络下正常使用。
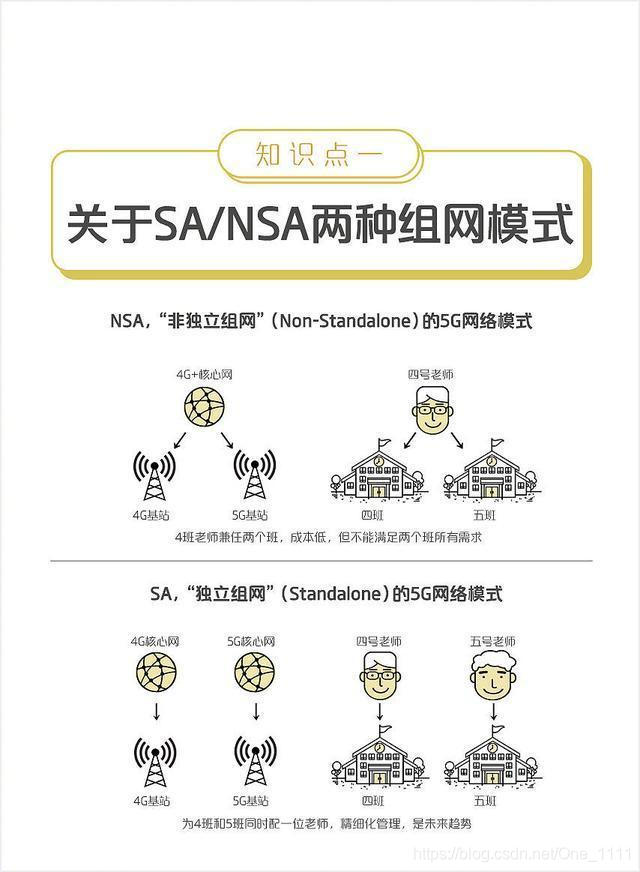
在NSA组网下,终端双连接LTE(LTE(Long Term Evolution,长期演进))和NR(5G New Radio)两种无线接入技术;在SA组网下,终端仅连接NR一种无线接入技术。
目前4g网络主要有两种模式,TD-LTE 和FDD-LTE。中国移动发展的是TD-LTE ,联通和电信使用FDD-LTE。所以手机上大都以LTE 表示4g网络。
7. 5G NR包含了部分LTE 频段,也新增了一些频段(n50、n51、n70及以上)。目前,全球最有可能优先部署的5G频段为n77、n78、n79、n257、n258和n260,就是3.3GHz-4.2GHz、 4.4GHz-5.0GHz和毫米波频段26GHz/28GHz/39GHz。
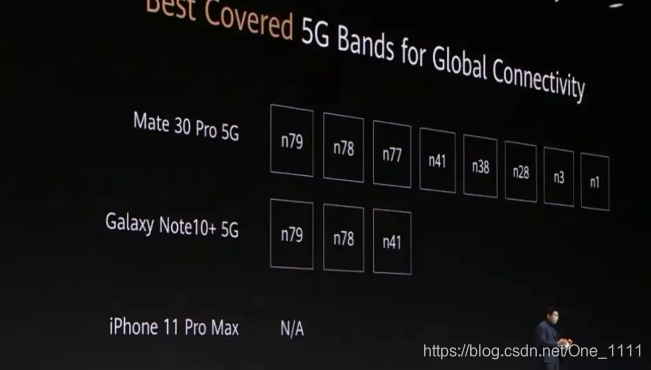
8. 双卡,双卡槽全部支持5G
9. 石墨烯散热,通话温度降低快
10. 最大4500毫安电池,反向无线充电,40W有线充电和27W无线充电
11. Mate30:广角、超广角、长焦的三摄系统,20480的ISO,45倍光学变焦/光学和电子防抖
Mate 30 pro 四摄系统,全新双主摄1/1.45英寸3:2分辨率RGGB大底和1/1.7英寸RYYB CMOS ISO高达409600,45倍变焦
科普:长焦镜头类似在手机上加了一个望远镜,让手机可以拍到更远的地方。相比主摄以及其他镜头,在拍摄远景能得到更清晰的画面。在我们放到取景框画面的手机会自动调用长焦镜头。
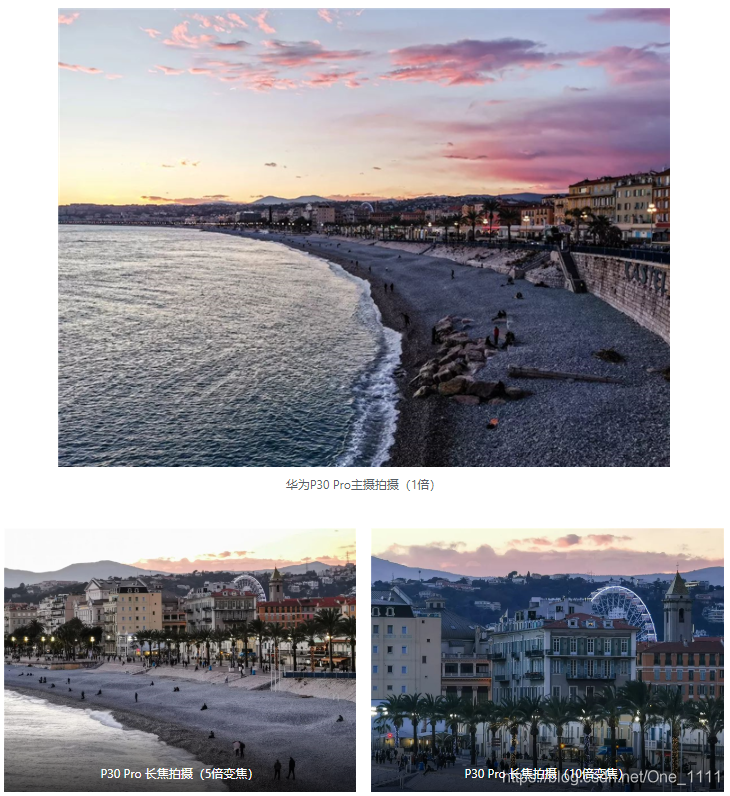
长焦端可以拥有好的背景虚化效果,用长焦端拍摄,背景虚化效果更强。所以有些品牌手机在拍摄人像作品的时候会调用长焦镜头。
超广角镜头可以带来更宽广的视角/超广角镜头会带来画面畸形问题/超广角近大远小的畸变原理/
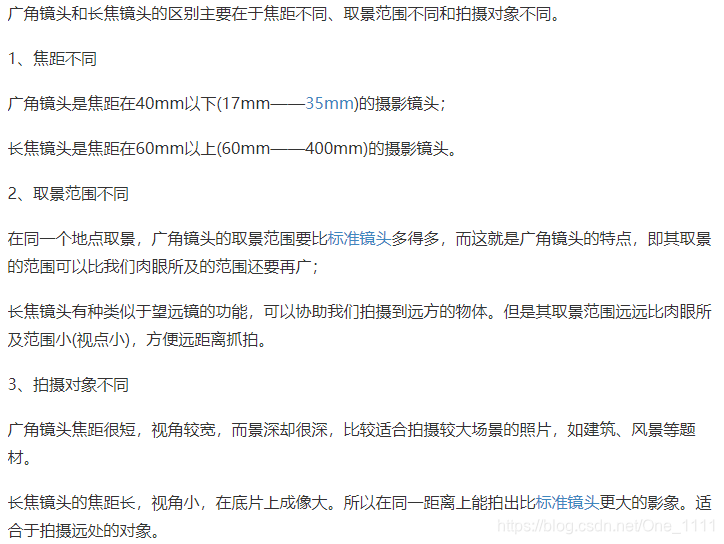
标准镜头是指焦距在40至55毫米之间的镜头。从标准镜头中观察的画面与人眼看见的画面十分接近,它是所有镜头中最基本的一种摄影镜头。/广角镜头的焦距比标准镜头短,分别有焦距38-24毫米,视角60-84度的普通广角和焦距20-13毫米,视角94-118度的超广角两种镜头。广角镜头适合拍摄距离近且景物大的照片,拍摄的画面比人眼所见要大得多。此外,广角镜头的画面强调前景且突出远近对比,也就是说,画面中近的东西更大,远的东西更小,有强烈的透视效果。/长焦镜头的焦距比标准镜头的长,分为85毫米-300毫米的普通远摄镜头和300毫米以上的超远摄镜头两种。主要用于拍摄远处的对象,能有效虚化背景突出主体。
感光度,又称为ISO值,是衡量底片对于光的灵敏程度,由敏感度测量学及测量数个数值来决定,感光度(ISO值)是来自胶片时代摄影的一个概念,国际标准化组织ISO(International Organization for Standardization)制定了胶片对光线的化学反应速度标准。
摄像头应该算是物理结构最为复杂的元件之一,它通常都是由PCB主板、CMOS传感器(SENSOR)、固定器(HOLDER)和镜头(LENS ASS′Y)构成。
把传统绿像素换成黄像素就是利用了黄色像素光波波长更长,更适合暗光环境下摄入光源成像,缺点就是在图像成像端YB像素需要先组合成青像素才能构图,对于算力要求更高,步骤更繁琐。(Pro 两个大底的好处?)
智能手机想要缩短与专业相机之间的差距,只有不断提升CMOS成像画质这么一条出路。比如,增加CMOS传感器尺寸,获得“底大一级压死人”的先天优势。(使用1/1.45 1/1.7大底?)
再比如,提升CMOS传感器的进光量,从而具备捕捉更多光线的能力,这样就能在同样环境下,拍摄出亮度更高、噪点更少、更清晰的照片。对CMOS而言,提升进光量的手段有很多,增加传感器尺寸、增大镜头光圈、增加单个像素感光面积、引入UltraPixel超像素摄像头(如HTC One M7)等都是可行的手段
拜耳阵列/反拜耳运算
拜耳阵列”之所以流行,是因为它是公认的最佳CMOS结构。但是,随着手机内置ISP单元性能的提升和各种成像算法的不断优化,给了优化CMOS结构的空间。于是,我们就看到了所谓的“RGBW”、“RWWB”和“RYYB” 等CMOS结构。
由于人眼对绿色敏感度最高,所以拜耳才会在每个RGBG阵列中用上2个绿色像素(G)。此时,如果我们将其中一个绿色像素(G)换成透光性更强的白色像素(W),组成所谓的“RGBW”
既然RGBW已经“抠掉”了一个绿色像素替换成白色像素,那何不更进一步,将另外一个绿色像素也换成白色呢?同样是2015年,联发科在发布曦力Helio P10时就曾主打一项名为“True Bright”的图像引擎,其主要的构成部分就是采用“RWWB”结构的CMOS传感器,将传统拜耳阵列上的两个绿色像素全部替换为白色,进光量比RGBW结构还要大
虽然联发科提倡的RWWB CMOS一直停留在纸面阶段,但这并不妨碍大家拿来借鉴参考。既然RWWB已经将2个绿色像素点给替换了,那为何不干脆彻底丢掉分色滤镜,让CMOS实现光线全透呢?于是,索尼就第一家推出了专业的IMX Mono黑白摄像头,拥有极高的进光量,可以记录暗光环境下的更多细节。 纯黑白+双摄
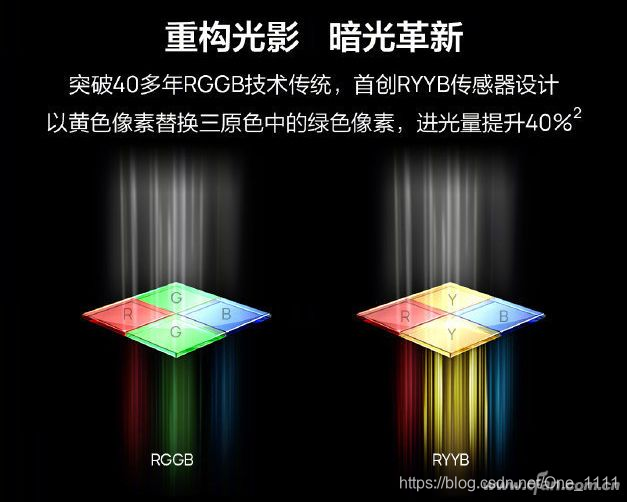
和RGGB相比,RYYB可以减轻前者在滤色过程中所带来的光之强度折损,可以让进光量提升高达40%。以华为P30 Pro为例,该产品的ISO高达409600
黄色是可以由红色+蓝色得来(R+G=Y),即黄色是绿色和红色的结合,在亮度上是两者的叠加。将三原色重塑后,RYYB CMOS在色彩原理上就将与RGGB产生根本性变化——RGGB光学三原色是加色法,表现的是吸收的光(绿色通道吸收绿光),R+G+B是白色,即吸收了一切光;RYB三原色是减色法,表现的是反射的光(黄色反射了红光和绿光),R+Y+B是黑色,即反射了一切光。YYB滤镜虽然可以提升进光量,但其本质却是变相增加了红色的进光量,从而提升了弱光环境下的表现。同时,由于黄色像素较多,偏色问题将难以避免,同时绿色像素的缺失也会影响饱和度。
13. EMUI10系统 暗色模式/息屏模式

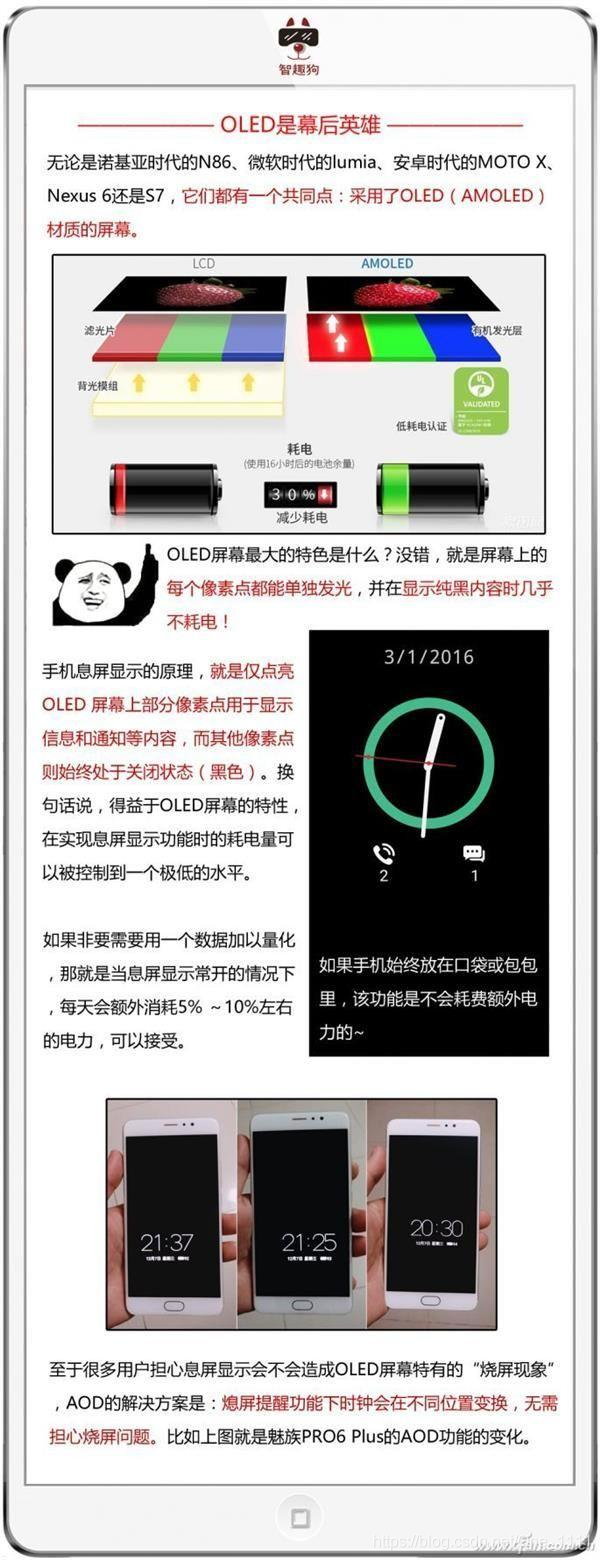

EMUI10基于安卓系统开发,加入了暗黑模式,并带来了多彩的AOD灭屏显示和升级的杂志锁屏,还引入莫兰迪风格的6种颜色。还有黄金比例图标、全新相机体验、深色模式、流畅动效等等, EMUI10从系统底层打通了Windows和Android的藩篱,实现了PC和手机的无缝协同,PC的键盘、鼠标成为手机的外设。EMUI10采用了3大关键分布式技术,采用分布式UI编程框架,实现应用界面多端自适应。
14. 手势隔空操作
15. 眼球追追踪防窥屏/调节屏幕旋转
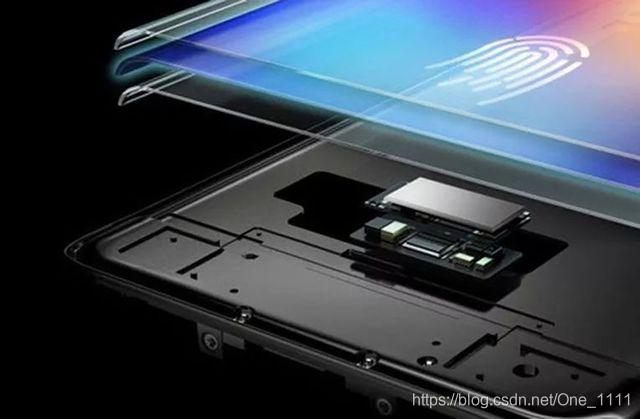
16. 屏下指纹/3D结构光面部解锁
屏下指纹识别技术,也叫隐形指纹技术。是通过屏幕玻璃下方完成指纹识别解锁过程的新技术,主要利用超声波、光学等穿透技术,可以穿透各种不同的材质,从而达到识别指纹的目的。
1)光学式指纹识别技术
光学技术顾名思义,肯定和光有关系。它的原理就是下面这张图。
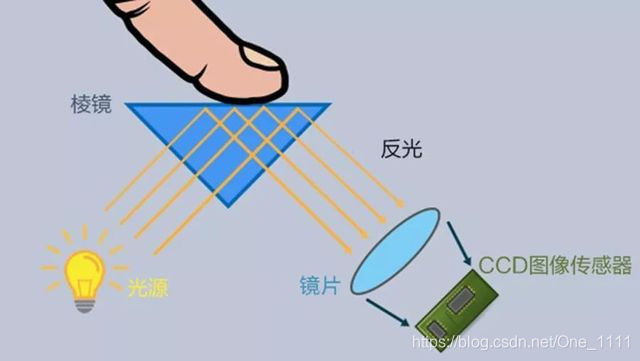
简单讲,手指按在指纹采集器上后,内部的光源将光线打到手指上,经过手指反射后汇集到识别器上,获得指纹图像。
2)超声波技术
超声波屏下指纹识别,就是在屏幕下方设置超声波传感器,通过超声波完成指纹识别工作,原理图如下。
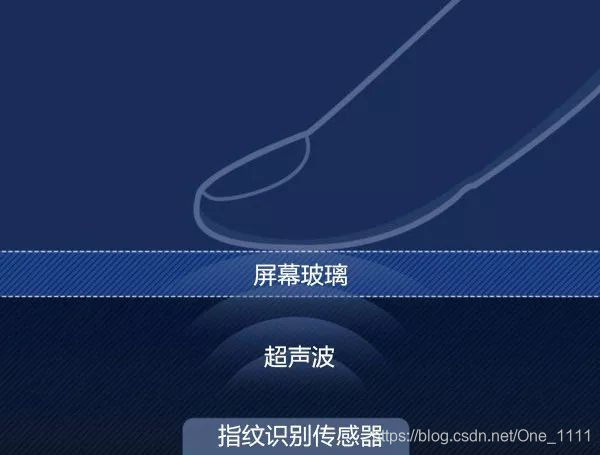
超声波指纹识别的安全性更高,湿手也能解锁,但目前还不成熟,比如超声波传感器体积大,识别速度慢,穿透力不够强等问题。
https://baijiahao.baidu.com/s?id=1589614259551547519&wfr=spider&for=pc
- 3D结构光
原理示意 3D结构光的整个系统包含结构光投影设备、摄像机、图像采集和处理系统。其过程就是投影设备发射光线到被测物体上,摄像机拍摄在被测物体上形成的三维光图形,拍摄图像经采集处理系统处理后获得被测物体表面数据。在这个系统中,当相机和投影设备相对位置一定时,投射在被测物体上的光线畸变程度取决于物体表面的深度,所以在拍摄图像中可以得到一张拥有深度的光线图像。
苹果首次在iPhone X上采用了面部识别技术,这是一套强大、安全的验证系统,通过它可以进行设备解锁或支付。Face ID得以实现主要依赖于苹果的原深感摄像头系统,这个系统主要包括红外镜头、泛光感应元件、点阵投影器等几项技术,通过实时协作对脸部的精细深度图识别。

其中,点阵投影器通过将30000多个肉眼不可见的光点投影在人的脸部,绘制成独一无二的面谱;红外镜头则读取点阵图案,捕捉它的红外图像,然后将数据发送至A11仿生这款芯片中的安全隔区,以确认是否匹配;泛感光元件加持,通过借助不可见的红外光线,实现黑暗中也可以顺利刷脸。
安卓阵营
这里就要以小米8探索版为例了。其3D结构光的工作原理与苹果的Face ID大同小异,主要由红外相机、泛光照明元件、点阵投影器等组成的3D结构光系统运行。
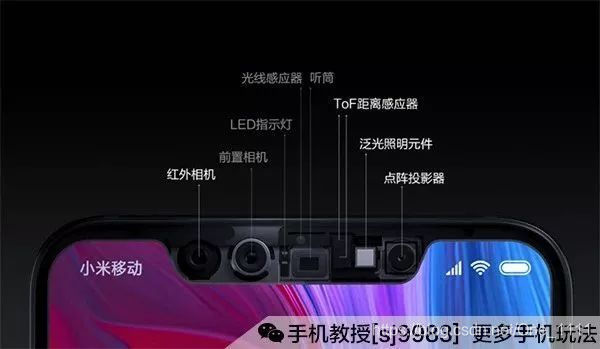
不同的是小米8探索版的点阵投射器投放了33000个红外点去构建3D人脸模型。看上去是不是比苹果要腻害?然鹅,尽管投射点多,但在数据采集和3D建模方面还是达不到苹果Face ID的精确级别。
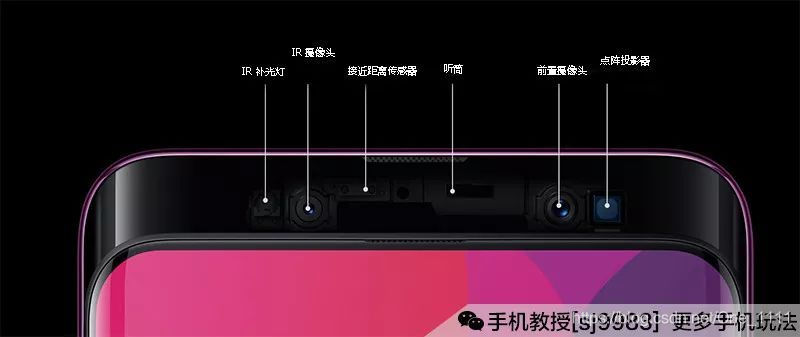
再来看看OPPO Find X的O-Face技术。主要是由IR补光灯、IR摄像头、点阵投影器等3D结构光系统实现。通过向人脸投射15000个光点,建立毫米级精度的3D深度图,实现信息对比并完成解锁。
红外人脸识别
红外人脸识别解锁相对于3D结构光来说,还停留在2D层面。红外人脸识别的工作原理是通过红外投射后,记住人脸的一些关键点,构建2D人脸模型,这种识别只需几个关键点核对无误就可解开,相比3D结构光的上万个阵点,安全系数低太多。早期一张照片都能破解,后面虽然增加了判定活物与否的辅助技术,但还是容易破解。而且受环境影响非常大,光线昏暗的地方识别成功率就大大降低了
AI人脸解锁
相信大家对AI并不陌生,AI就是人工通过模拟人的意识、思维。通过像人那样去思考,来进行信息识别和记忆。所以AI人脸解锁是通过数以亿计次的计算算法来熟悉并记住人的脸部特征,详细记录手机使用者的日常行为习惯来分析你是不是手机的主人。

















 2309
2309

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









