







一、基本术语
图(graph):图是由顶点的有穷非空集合和顶点之间边的集合组成,通常表示为:G(V,E),其中,G表示一个图,V是图G中的顶点的集合,E是图G中边的集合。
顶点(Vertex):图中的数据元素。线性表中我们把数据元素叫元素,树中将数据元素叫结点。
边:顶点之间的逻辑关系用边来表示,边集可以是空的。
无向边(Edge):若顶点V1到V2之间的边没有方向,则称这条边为无向边。
无向图(Undirected graphs):图中任意两个顶点之间的边都是无向边。(A,D)=(D,A)
对于无向图G来说,G1=(V1,{E1}),其中顶点集合V1={A,B,C,D};边集和E1={(A,B),(B,C),(C,D),(D,A),(A,C)}

有向边:若从顶点V1到V2的边有方向,则称这条边为有向边,也称弧(Arc)。用<V1,V2>表示,V1为狐尾(Tail),V2为弧头(Head)。(V1,V2)≠(V2,V1)。
有向图(Directed graphs):图中任意两个顶点之间的边都是有向边。
注意:无向边用“()”,而有向边用“< >”表示。
简单图:图中不存在顶点到其自身的边,且同一条边不重复出现。
无向完全图:无向图中,任意两个顶点之间都存在边。
有向完全图:有向图中,任意两个顶点之间都存在方向互为相反的两条弧。
稀疏图:有很少条边。
稠密图:有很多条边。
权(Weight):与图的边或弧相关的数。
网(Network):带权的图。
子图(Subgraph):假设G=(V,{E})和G‘=(V',{E'}),如果V'包含于V且E'包含于E,则称G'为G的子图。
度(Degree):无向图中,与顶点V相关联的边的数目。有向图中,入度表示指向自己的边的数目,出度表示指向其他边的数目,该顶点的度等于入度与出度的和。
路径的长度:一条路径上边或弧的数量。
连通图:图中任意两个顶点都是连通的。
图1不是连通图,图2是连通图。

连通分量:无向图中的极大连通子图。(子图必须是连通的且含有极大顶点数)。图1有两个连通分量
强连通分量:有向图中的极大强连通子图。
生成树:无向图中连通且n个顶点n-1条边叫生成树。
有向树:有向图中一顶点入度为0其余顶点入度为1。
森林:一个有向图由若干棵有向树构成生成森林。
二、图的存储结构
1.邻接矩阵:用两个数组,一个数组保存顶点集,一个数组保存边集。


图的邻接矩阵存储的结构:
#define maxvex 100
typedef struct
{
char vexs[maxvex];
int arc[maxvex][maxvex];
int vertex,edges;
}MGraph;无向图的创建代码:
#define maxvexs 100
#define infinity 65535//用65535来表示∞
typedef struct
{
char vexs[maxvexs];
int arc[maxvexs][maxvexs];
int vertexes,edges;
}mgraph;
void creatgraph(mgraph *g)
{
int i,j,k,w;
printf("输入顶点数和边数:\n");
scanf("%d,%d",&g->vertexes,&g->edges);
for(i=0;i<g->vertexes;i++)//读入顶点信息,建立顶点表
scanf("%c",&g->vexs[i]);
for(i=0;i<g->vertexes;i++)
for(j=0;j<g->vertexes;j++)
g->arc[i][j]=infinity;//初始化邻接矩阵
for(k=0;k<g->vertexes;k++)//读入edges条边,建立邻接矩阵
{
printf("输入边(Vi,vj)上的下标i,下标j,和权w:\n");
scanf("%d%d%d",&i,&j,&w);
g->arc[i][j]=w;
g->arc[j][i]=w;//无向图,矩阵对称
}
}2.邻接表:数组与链表相结合的存储方法。

对于带权值的网图,可以在边表结点定义中再增加一个weight的数据域,存储权值信息即可。
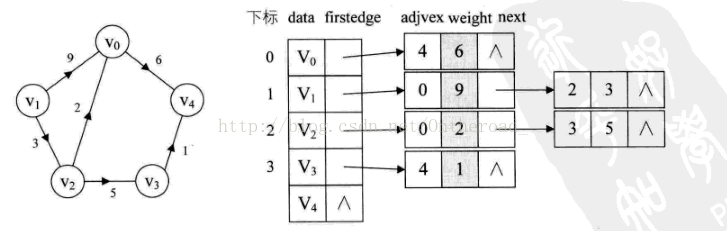
邻接表结点定义
typedef struct EdgeNode
{
int adjvex; //邻接点域,存储该顶点对应的下标
int weight; //用于存储权值,对于非网图可以不需要
struct EdgeNode *next; //链域,指向下一个邻接点
}EdgeNode;//边表结点
typedef struct VertexNode //顶点表结点
{
char data; //顶点域,存储顶点信息
EdgeNode *firstedge; //边表头指针
}VertexNode,AdjList[MAXVEX];
typedef struct
{
AdjList adjList;
int numVertexes,numEdges;//图中当前顶点数和边数
}GraphAdjList;
三、图的遍历
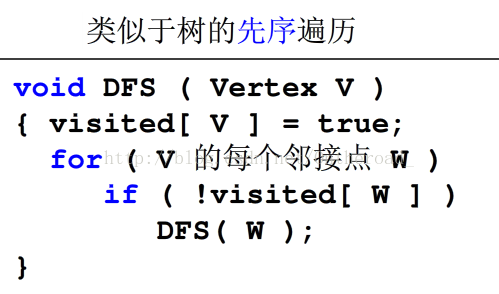
1.深度优先遍历(DFS):从图中某个顶点v出发,访问此顶点,然后从v的未被访问的邻接点出发深度优先遍历图,直至图中所有和v有路径相通的顶点都被访问到。
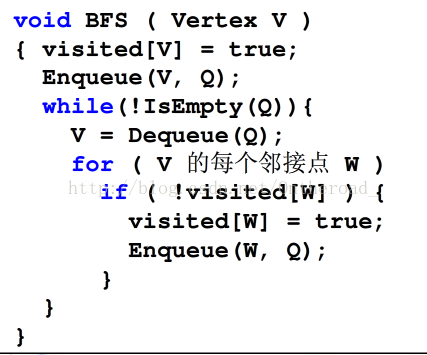
2.广度优先遍历(BFS):类似于树的层次遍历。

四、最小生成树
最小生成树:构造连通网的最小代价生成树。
1.普里姆(prime):
第一种:先将一个起点加入最小生成树,之后不断寻找与最小生成树相连的边权最小的边能通向的点,并将其加入最小生成树,直至所有顶点都在最小生成树中。


第二种:
1.将一个图的顶点分为两部分,一部分是最小生成树中的结点(A集合),另一部分是未处理的结点(B集合)。
2.首先选择一个结点,将这个结点加入A中,然后,对集合A中的顶点遍历,找出A中顶点关联的边权值最小的那个(设为v),将此顶点从B中删除,加入集合A中。
3.递归重复步骤2,直到B集合中的结点为空,结束此过程。
4.A集合中的结点就是由Prime算法得到的最小生成树的结点,依照步骤2的结点连接这些顶点,得到的就是这个图的最小生成树。

2.克鲁斯卡尔(kluskal):在剩下的所有未选取的边中,找最小边,如果和已选取的边构成回路,则放弃,选取次小边。


五、最短路径
1.迪杰斯特拉算法(Dijkstra):把图中的顶点集合V分成两组,第一组为已求出最短路径的顶点集合S(初始时S中只有源节点,以后每求得一条最短路径,就将它对应的顶点加入到集合S中,直到全部顶点都加入到S中);第二组是未确定最短路径的顶点集合U。
算法步骤:
(1)初始化时,S只含有源节点;
(2)从U中选取一个距离v最小的顶点k加入S中(该选定的距离就是v到k的最短路径长度);
(3)以k为新考虑的中间点,修改U中各顶点的距离;若从源节点v到顶点u的距离(经过顶点k)比原来距离(不经过顶点k)短,则修改顶点u的距离值,修改后的距离值是顶点k的距离加上k到u的距离;
(4)重复步骤(2)和(3),直到终点在S中。


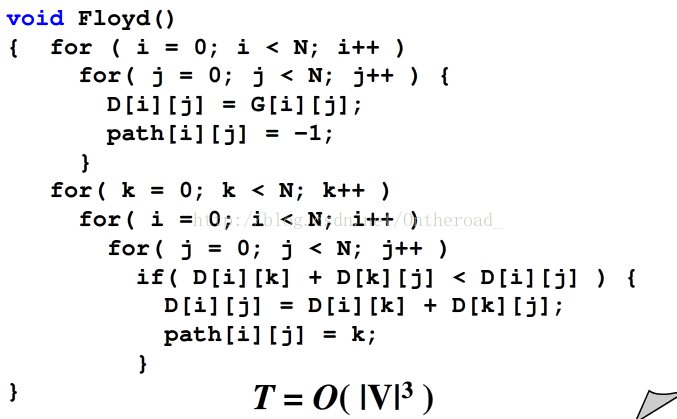
2.弗洛伊德算法(Floyd):















 4031
4031

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









