






基于改进自适应蚁群算法MAACO的机器人路径规划技术解析
随着科技的飞速发展,智能化机器人技术已成为当今研究的热点领域。在无人船、无人机、无人车以及自动驾驶等场景中,路径规划算法发挥着至关重要的作用。本文将聚焦于一种名为MAACO(改进自适应蚁群算法)的路径规划算法,并结合顶刊研究成果,深入探讨其在机器人领域的应用及潜在价值。
一、背景引入
在现代智能化机器人中,路径规划算法负责为机器人提供最优或次优的行动路径,以确保其高效、安全地完成任务。传统的路径规划算法往往在某些复杂环境下表现欠佳,如存在大量障碍物、动态变化的环境等。因此,研究人员不断探索新的路径规划算法,以应对这些挑战。MAACO算法便是其中的一种创新尝试。
二、MAACO算法概述
MAACO算法是基于蚁群算法的一种改进自适应版本。蚁群算法模拟自然界中蚂蚁寻找食物的行为,通过信息素更新和个体间的协作来完成寻优任务。MAACO算法在标准蚁群算法的基础上,引入了多种改进措施,如自适应调整信息素更新策略、动态调整参数等,以提高算法的寻优能力和效率。
三、MAACO在机器人路径规划中的应用
- 无人船路径规划:在海洋环境中,无人船需要面对复杂的海流、风浪等挑战。MAACO算法能够为其规划出安全、高效的航行路径,有效避免海上障碍物。
- 无人机路径规划:无人机在飞行过程中需要面对复杂多变的环境和飞行任务需求。MAACO算法能够帮助无人机实现精准的路径规划,提高飞行效率和安全性。
- 无人车路径规划:无人车行驶过程中需考虑道路情况、车辆自身条件及行驶任务要求等因素。MAACO算法通过优化路径规划,可实现无人车的智能行驶和高效配送。
- 自动驾驶路径规划:在自动驾驶领域,MAACO算法能够为车辆提供实时、动态的路径规划,确保车辆在复杂交通环境中安全行驶。
四、MATLAB实现及顶刊复现解析
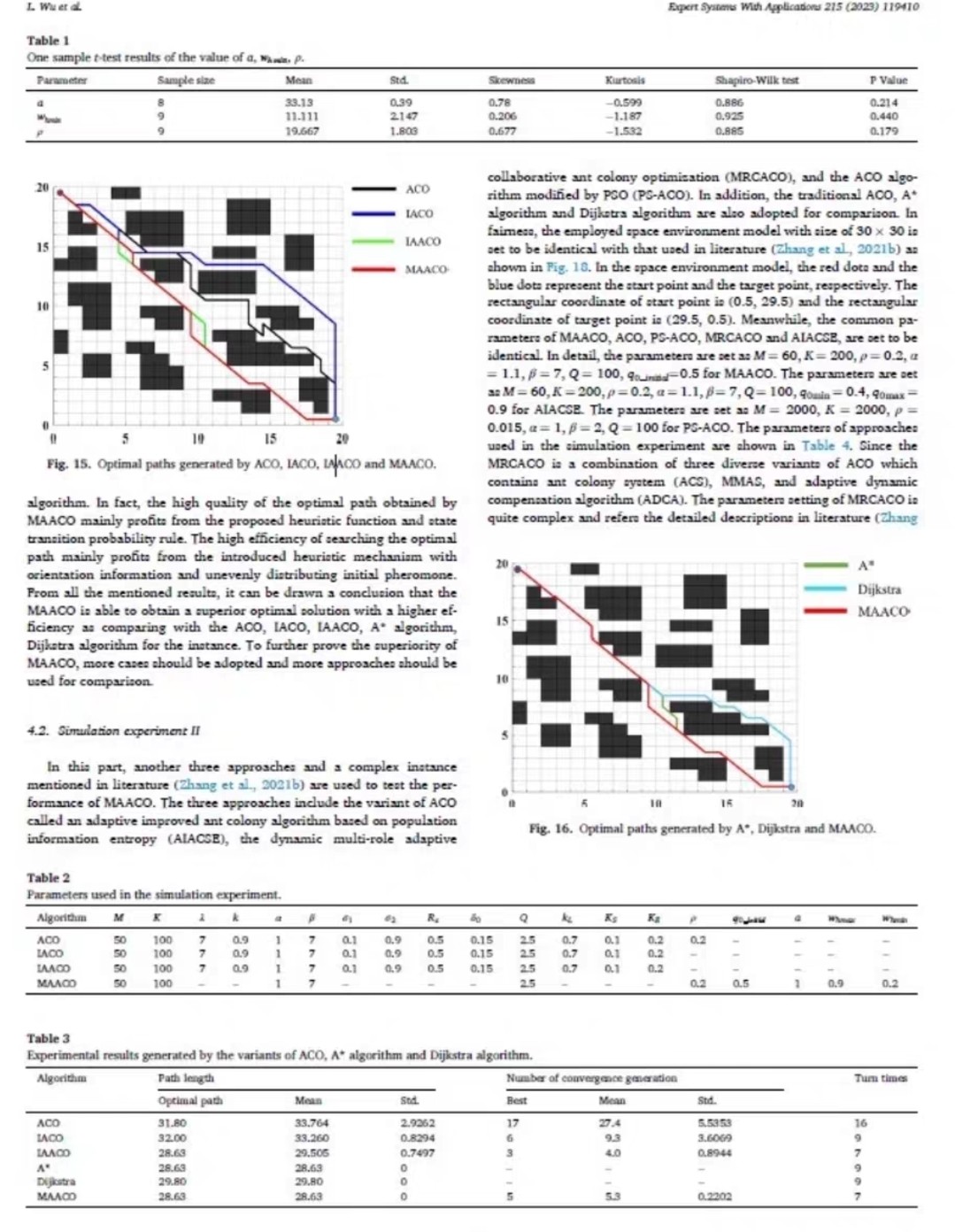
MATLAB作为一种强大的科学计算,为MAACO算法的实现提供了有力的支持。在顶刊中,研究者通过MATLAB实现了MAACO算法,并通过实验验证了其在机器人路径规划中的有效性。本文将结合MATLAB实现的具体细节,深入解析MAACO算法的实现过程及其在机器人路径规划中的应用效果。
五、MAACO算法的优缺点分析
与其他路径规划算法相比,MAACO算法具有诸多优点,如适应性强、鲁棒性高等。但同时,也存在一些挑战和不足之处,如计算复杂度较高、参数调整较为困难等。本文将详细分析MAACO算法的优缺点,并探讨其未来的发展方向和改进方向。
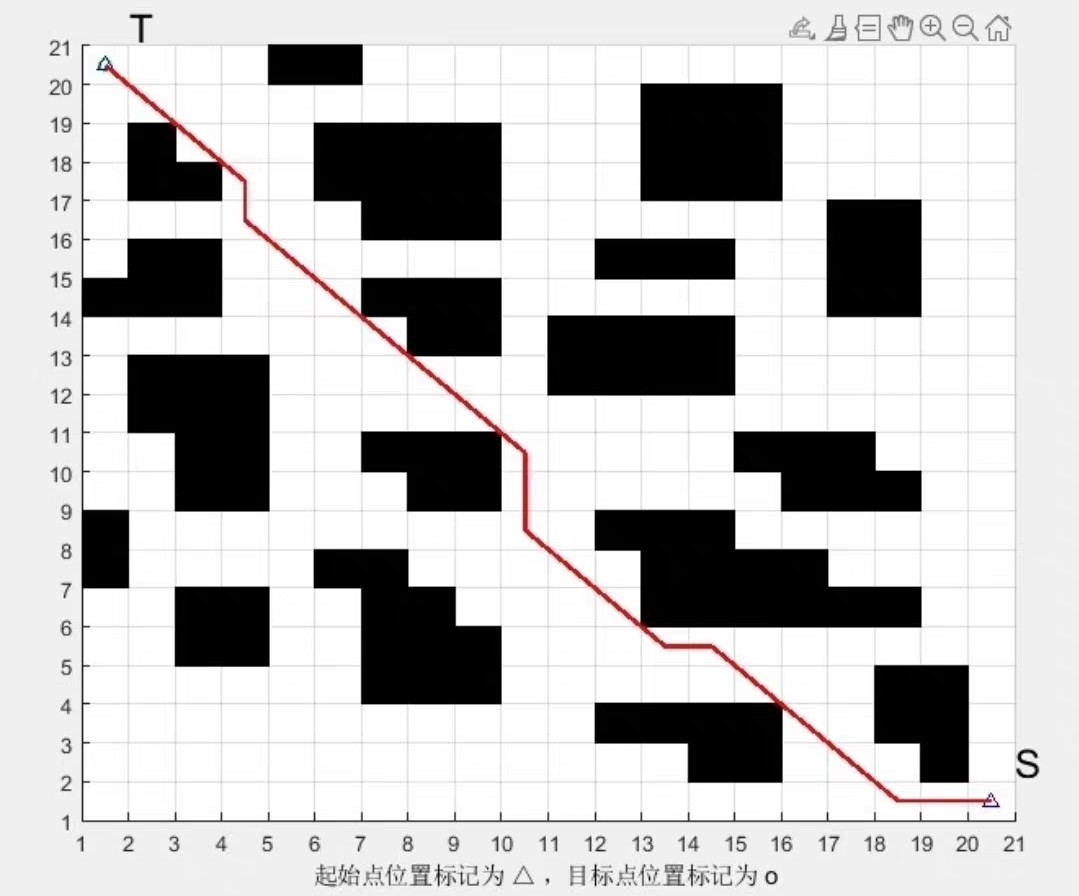
六、案例分析与实践应用展示
本文将通过实际案例,展示MAACO算法在机器人路径规划中的实际应用效果。通过对比分析MAACO算法与传统路径规划算法的优劣,让读者更加深入地了解MAACO算法的应用价值。同时结合最新的研究动态和行业发展趋势,探讨MAACO算法在机器人领域的未来应用前景。
七、总结与展望
本文详细探讨了基于改进自适应蚁群算法MAACO的机器人路径规划技术。从背景引入、MAACO算法概述、在机器人领域的应用、MATLAB实现及顶刊复现解析、优缺点分析到案例分析与实践应用展示等多个方面进行了全面阐述。展望未来,MAACO算法在机器人路径规划领域具有广阔的应用前景和进一步的研究价值。希望通过本文的探讨,能够为读者提供一个关于MAACO算法的全面视角,并激发更多研究者在这一领域的探索和创新。
-顶刊复现,基于改进自适应蚁群算法MAACO的机器人,无人船,无人机,无人车,自动驾驶的路径规划算法,MATLAB编写



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









