






1、示教器下方提示检查位置【R1】or[S1]等

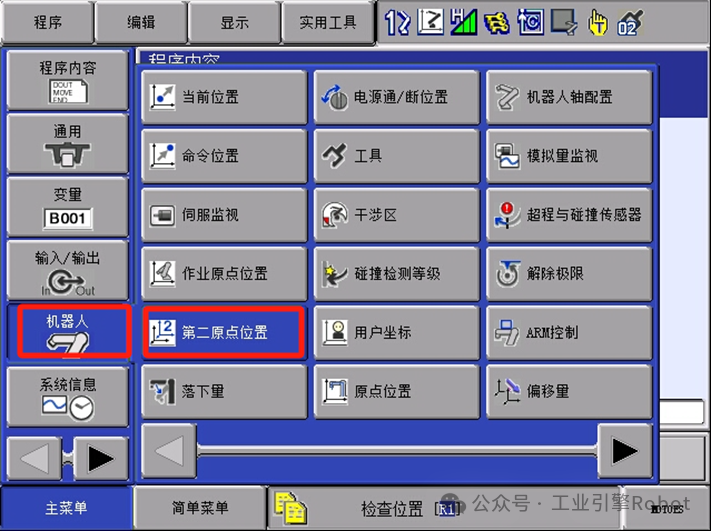
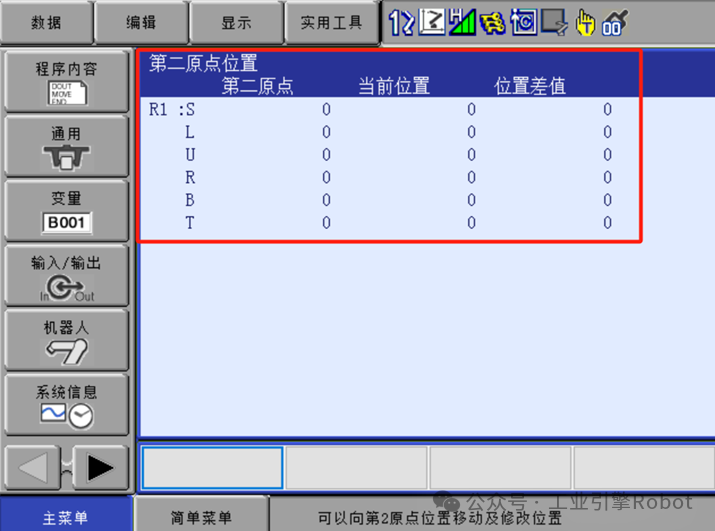
2、机器人-第二原点位置
3、接通伺服电源,按“前进”,直到机器人的位置差值全部为0(注意机器人是否有干涉),松开“前进”。
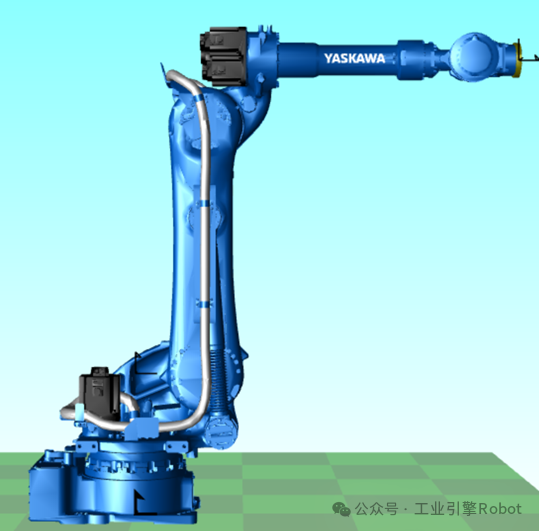
机器人第二原点,呈直角姿态。(以GP180为例)
数据-位置确认,解除后手动回到作业原点位置,继续工作。
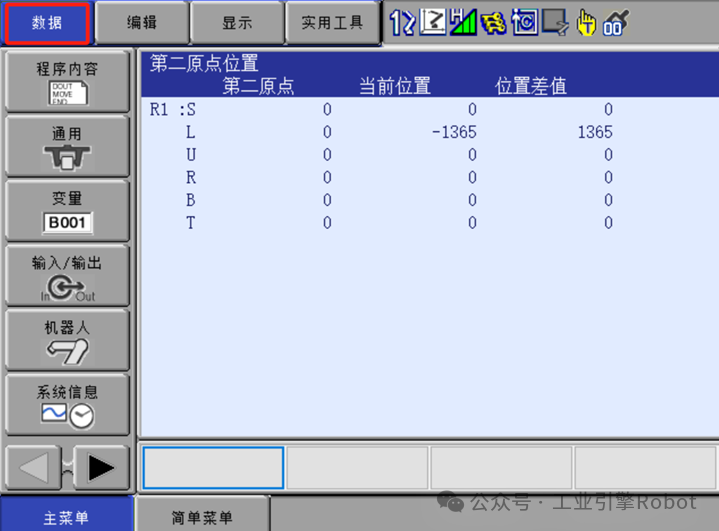
第二原点数据被修改,无法回到原点姿态,进行如下操作。
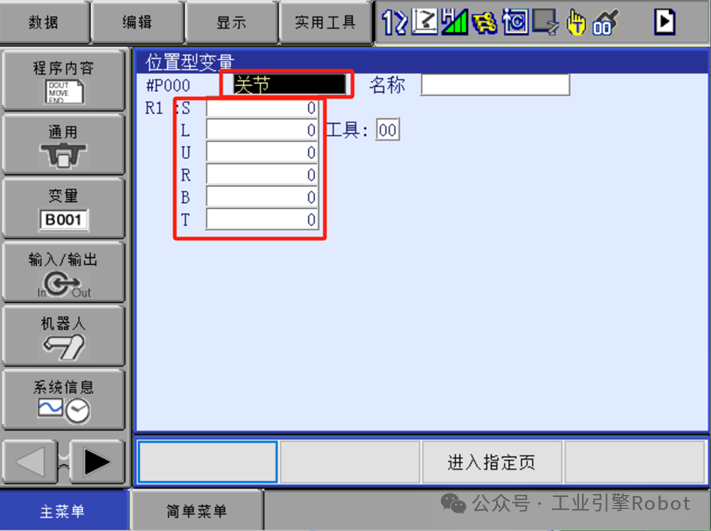
变量-P位置型
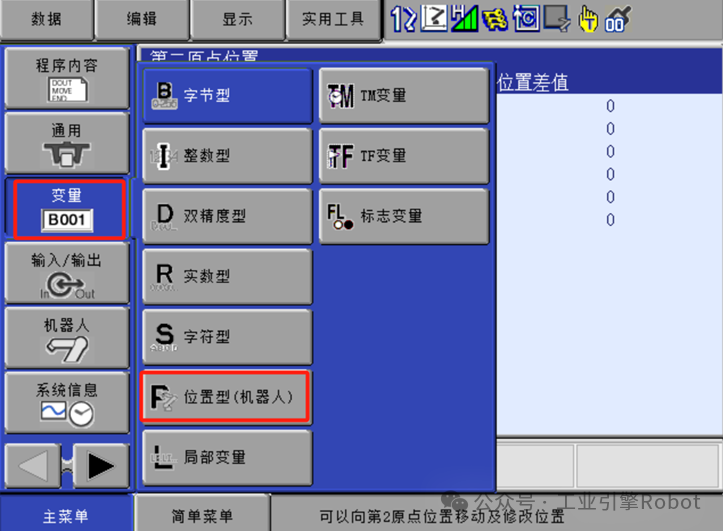
创建未使用P变量-关节-数据为0,伺服上电前进,直到机器人回到原点姿态。
机器人-第二原点位置
数据-位置确认,解除后手动回到作业原点位置,继续工作。
感谢大家关注、点赞、转发。
有想学习安川机器人内容可在下方留言。

















 4122
4122

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









