






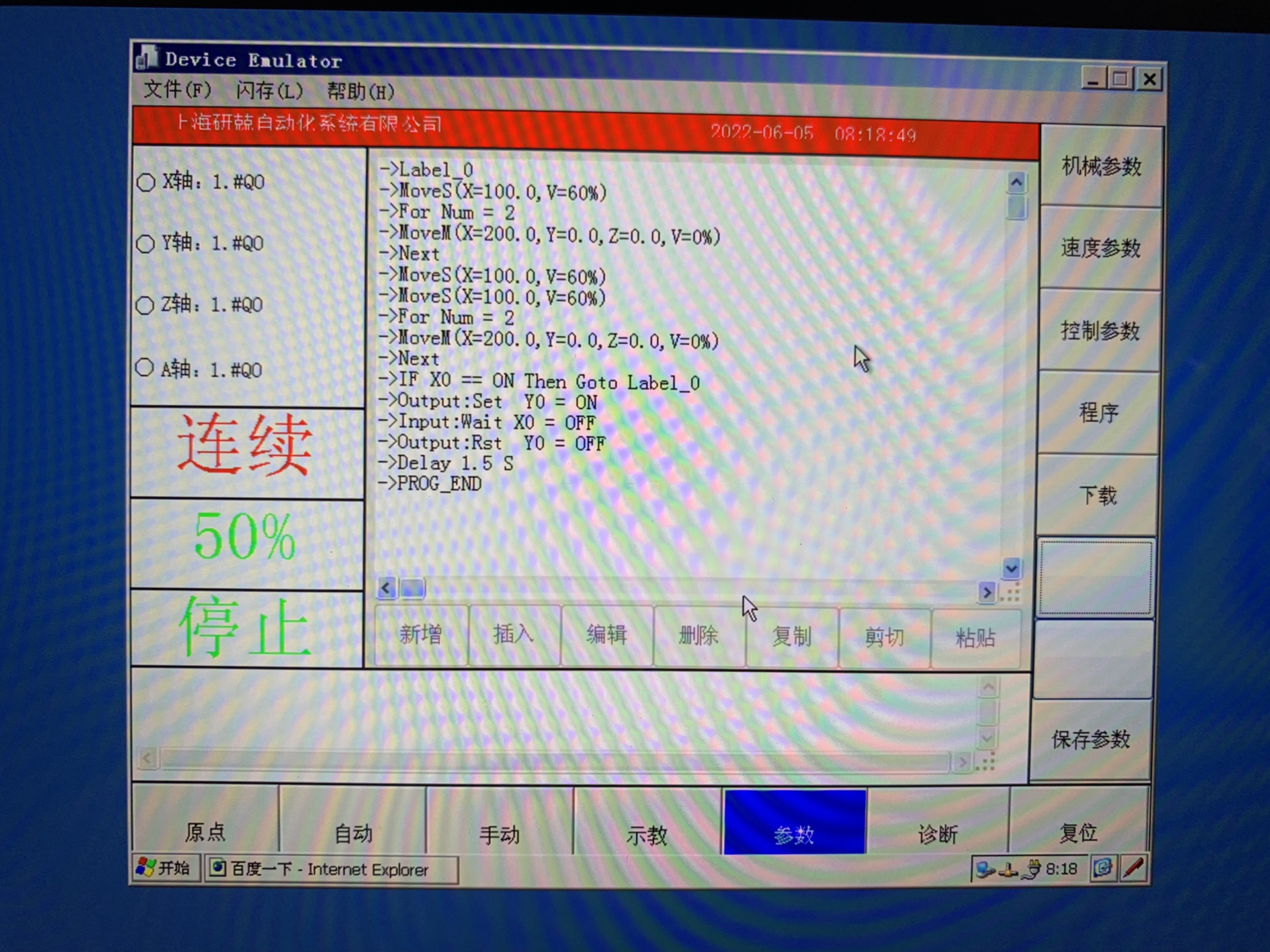
基于WinCE6.0 + Visual Studio2008(VC++开发) + Googol固高codesys运动控制器,开发的示教控制系统。
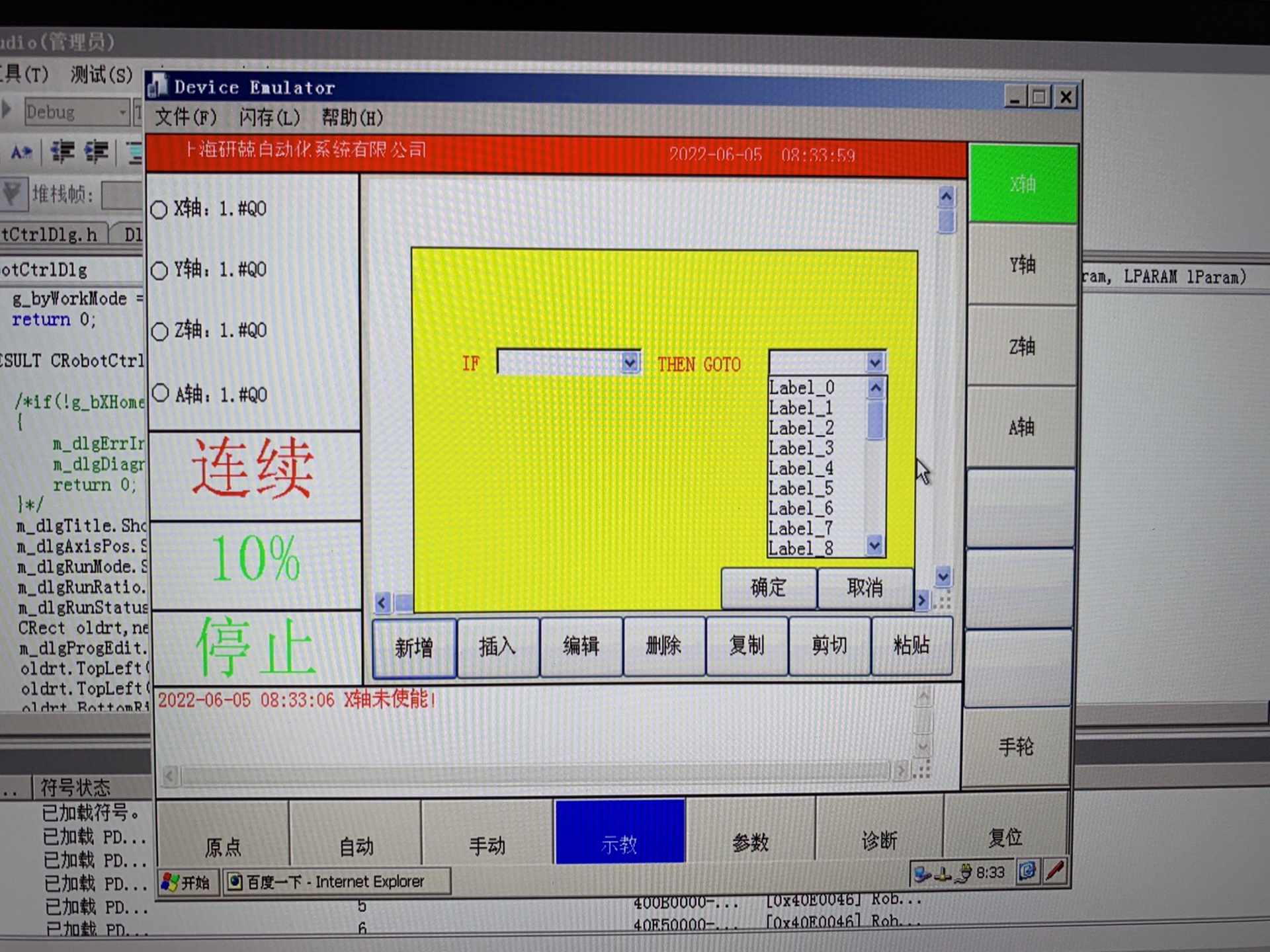
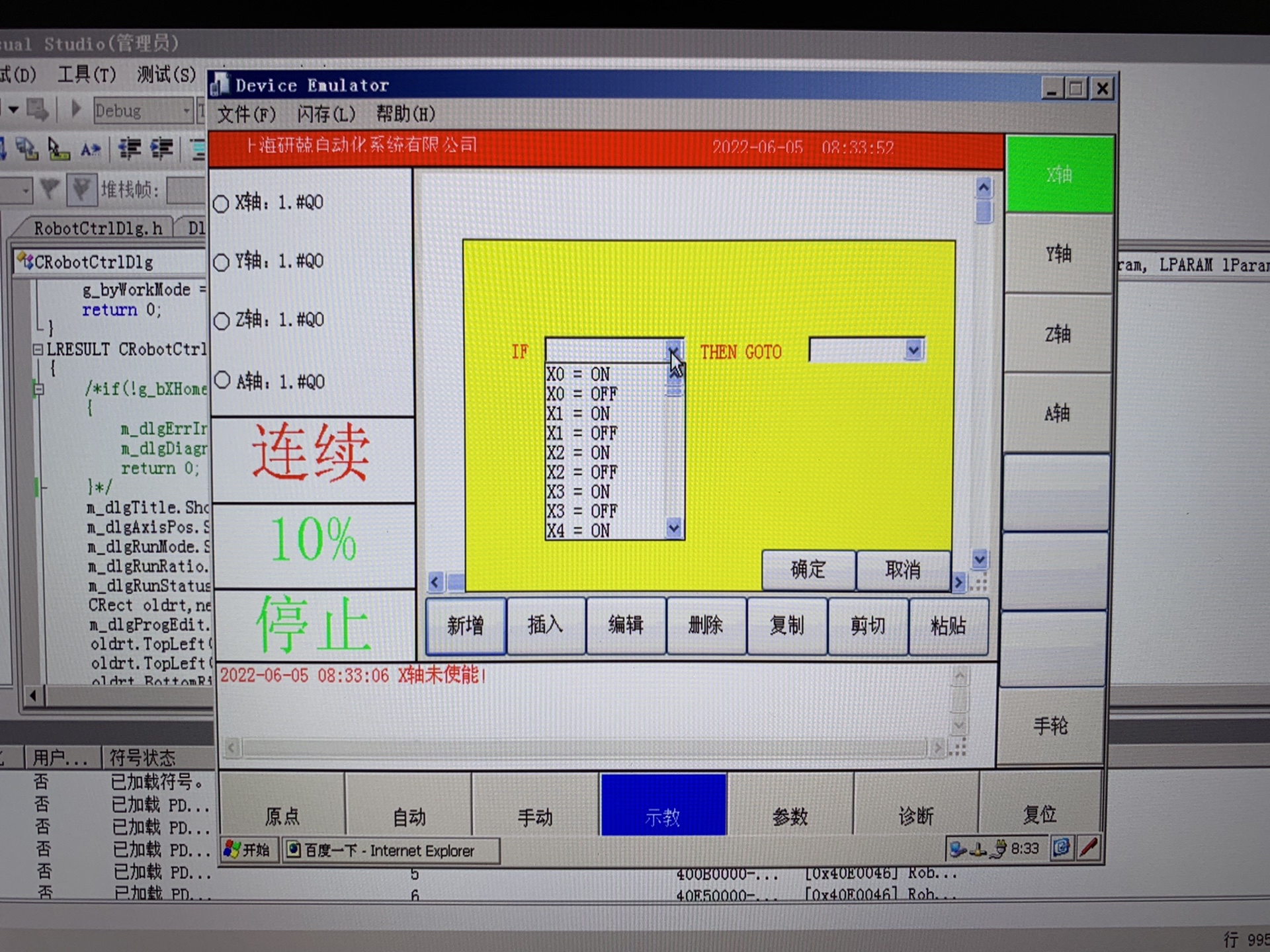
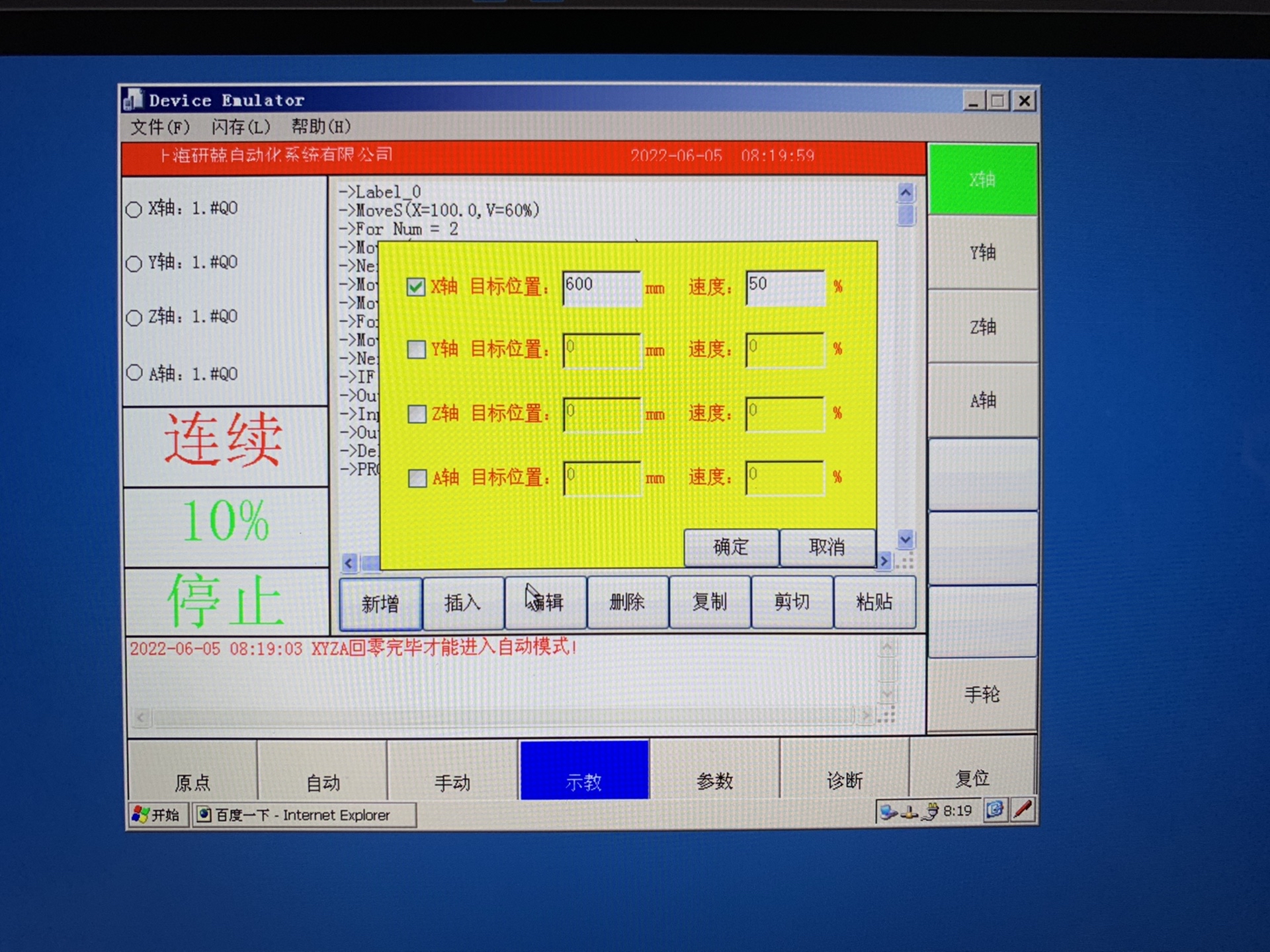
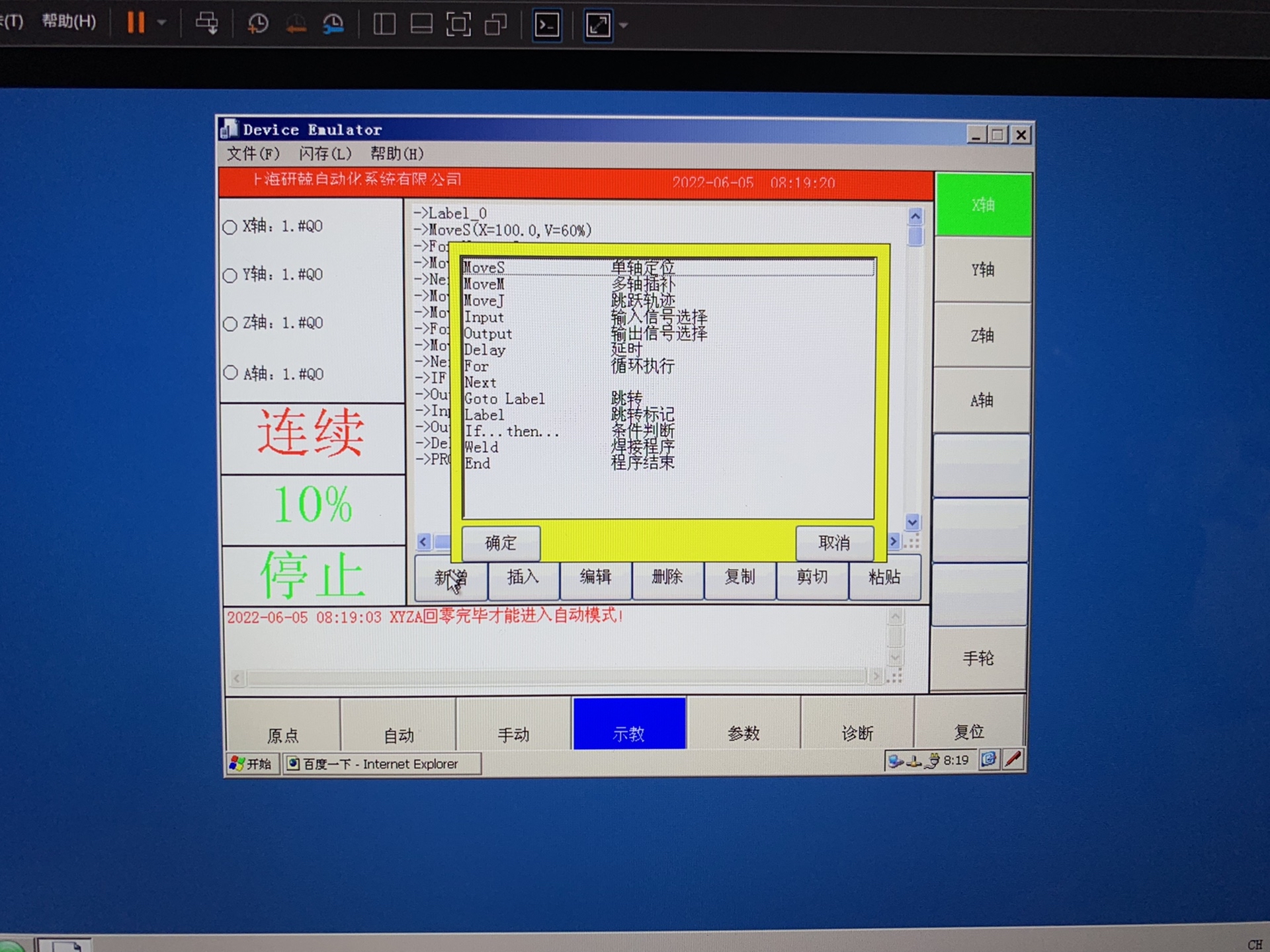
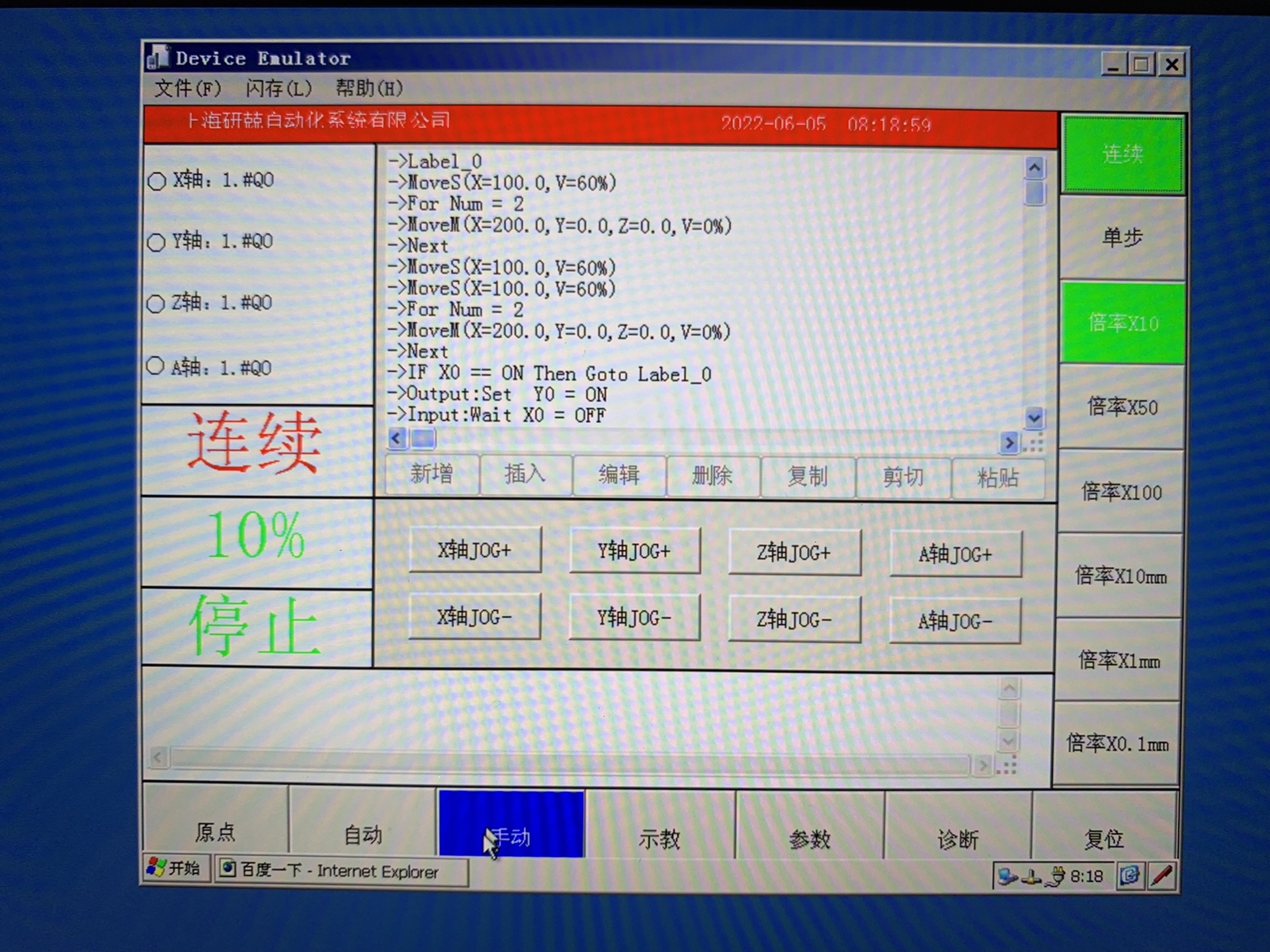
操作者可以通过简单的选择、参数设定而实现相对、绝对定位,条件判断、跳转、延时、循环、输入等待、输出置位、复位等功能。
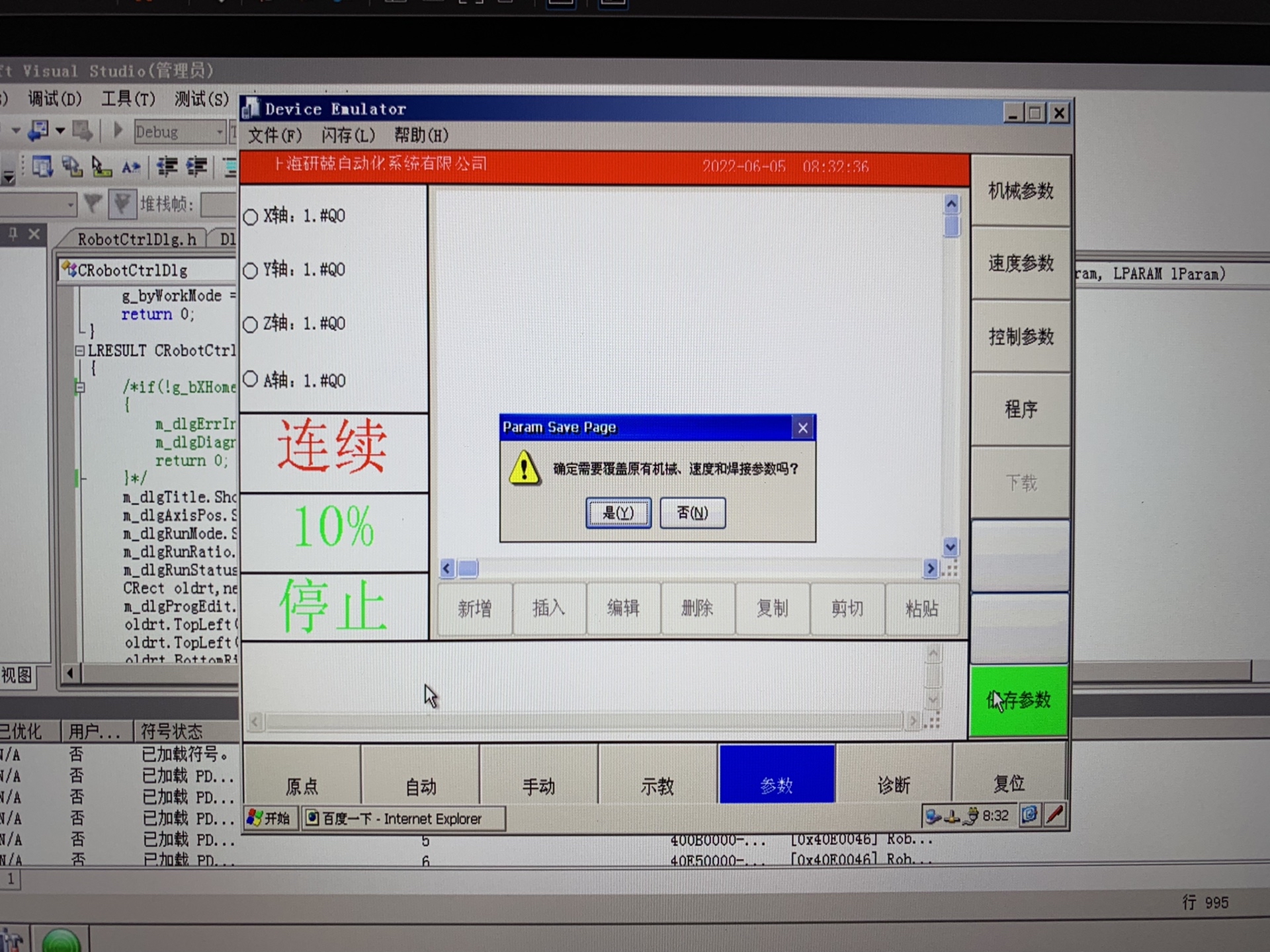
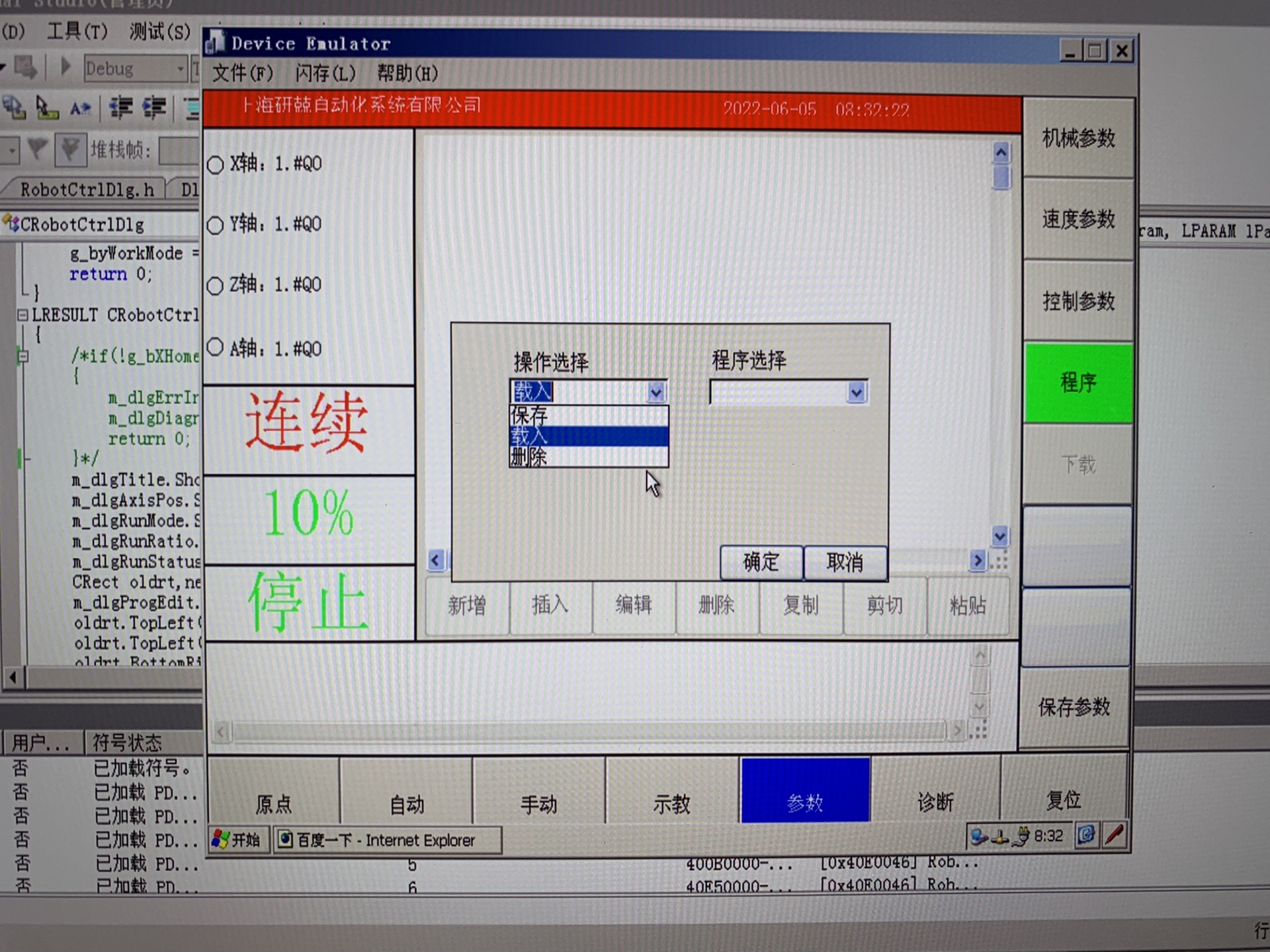
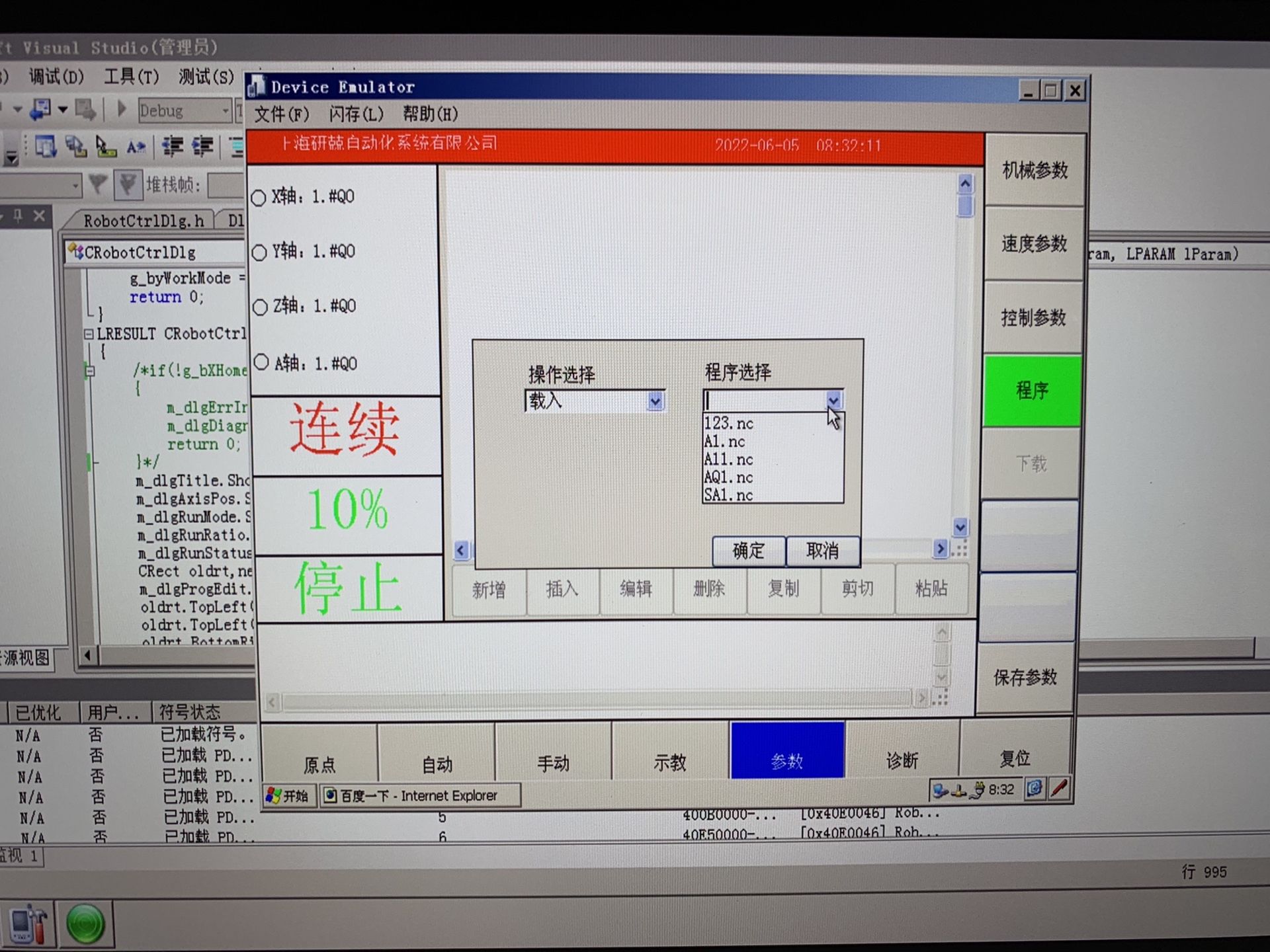
编辑好的程序可以存储、删除、调用。
同时编程过程中对于命令行可以实现新建、插入、编辑、复制、剪切、粘贴。
整个源代码包含WinCE开发的示教界面源代码、固高CPAC控制器的源代码。
内含服务器端和客户端的socket网络通讯,以及与松下KV200视觉系统的通讯,定位坐标的读取,引导定位
ID:89600675977469575
MotionCtrl
基于WinCE6.0 + Visual Studio2008(VC++开发) + Googol固高codesys运动控制器,开发的示教控制系统是一项具有广泛应用前景的技术创新。本文将围绕该系统展开,详细分析其功能和特点,以及开发过程中的关键技术点。
首先,该示教控制系统的主要功能是实现相对和绝对定位、条件判断、跳转、延时、循环、输入等待、输出置位、复位等。通过简单的选择和参数设定,操作者可以轻松地完成这些功能的设置。这为用户提供了便捷操作的方式,实现了人机交互的友好性。
同时,该控制系统还支持程序的存储、删除和调用。操作者可以将编辑好的程序进行存储,方便后续的调用和使用。对于已有的程序,也可以进行删除操作。这样的设计使得系统更加灵活和可扩展。
在编程过程中,该系统还提供了对于命令行的一系列操作,包括新建、插入、编辑、复制、剪切和粘贴等。这样的功能使得程序的编写更加高效和便捷,能够极大地提高开发效率。
整个源代码包含WinCE开发的示教界面源代码和固高CPAC控制器的源代码。这样的设计使得系统的代码更加完整和可读性更强,开发者可以根据自己的需求进行修改和调试,提高系统的可定制性。
此外,该控制系统还具备服务器端和客户端的socket网络通讯功能,以及与松下KV200视觉系统的通讯能力。这使得系统不仅可以独立运行,还能与其他设备进行数据交换和共享,实现更广泛的应用场景。
最后,该控制系统还具备定位坐标的读取和引导定位功能。通过与松下KV200视觉系统的通讯,系统可以获取目标位置的坐标信息,并进行引导定位,从而实现更加精准的定位控制。这为用户提供了更高的定位精度和可靠性。
综上所述,基于WinCE6.0 + Visual Studio2008(VC++开发) + Googol固高codesys运动控制器开发的示教控制系统具备诸多功能和特点。其简单易用的操作界面、灵活可扩展的程序存储和调用功能、高效便捷的命令行操作、完整可读的源代码、多样化的通讯能力和精准的定位控制,使得该系统成为程序员社区中备受关注的技术创新之一。在未来的发展中,我们相信该系统还具备更大的潜力和应用空间。
相关的代码,程序地址如下:http://matup.cn/675977469575.html
















 484
484











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









