






典型路况下无人驾驶车辆局部路径规划算法,可修改地图,根据rrt算法规划最优轨迹,利用B样条进行拟合,剪枝,最终形成最终轨迹
ID:6559748613204643
小连的路径规划小店
无人驾驶技术是当今科技领域的热门话题,其在交通运输、物流配送等领域具有广阔的应用前景。而其中的局部路径规划算法作为无人驾驶技术中的核心环节之一,更是备受关注。
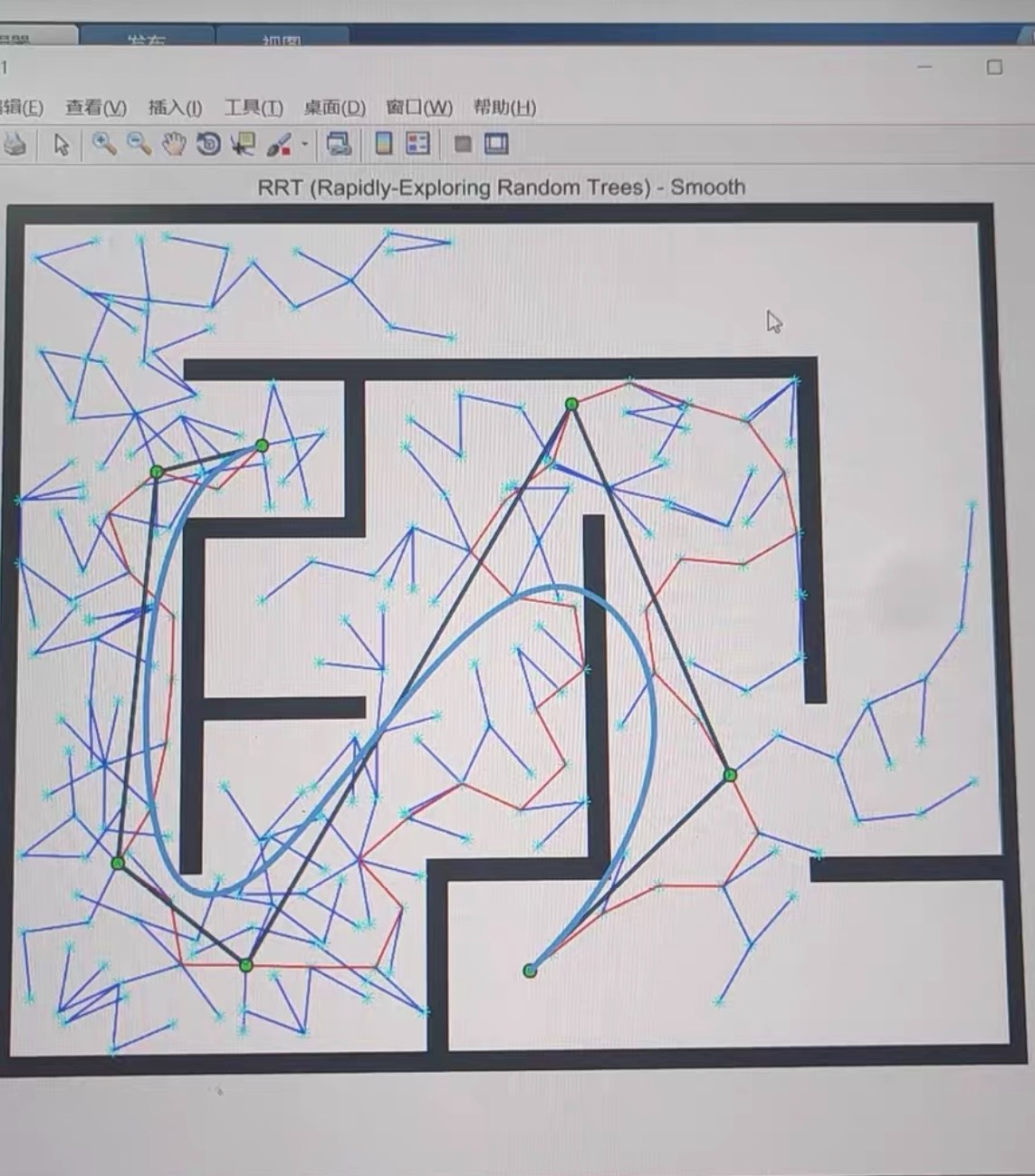
在典型路况下,无人驾驶车辆需要能够准确、高效地规划局部路径,以应对各种复杂的交通环境。而一种常见的局部路径规划算法是利用Rapidly-exploring Random Tree(RRT)算法,该算法通过随机探索空间的方法来搜索最优路径。
局部路径规划算法的第一步是对地图进行修改,以适应无人驾驶车辆的行驶需求。具体而言,可以通过添加、删除或修改地图中的道路、交叉口等信息,来实现路径规划的精准性和灵活性。这样的修改可以根据实际情况进行调整,以满足不同场景下的路径规划需求。
在地图修改完成后,接下来就是利用RRT算法来规划最优轨迹。RRT算法的基本原理是在搜索空间中随机采样点,并利用已有的路径不断扩展,直到找到达到目标状态的路径。在局部路径规划中,RRT算法可以通过模拟无人驾驶车辆的运动过程,不断生成新的路径段,以逐步逼近目标轨迹。
由于生成的路径段可能存在不连续、不光滑的问题,因此还需要进行拟合操作,以提高路径的平滑性和连续性。在这里,可以采用B样条曲线来对路径进行拟合。B样条曲线作为一种常用的数学工具,在计算机图形学和机器学习领域有着广泛的应用。通过将路径上的离散点与B样条曲线进行拟合,可以得到一条平滑的最终轨迹。
然而,由于路径规划过程中可能会生成大量的候选路径段,其中许多路径段并不符合要求,因此需要对路径进行剪枝操作,以减少计算和时空开销。剪枝操作可以通过对路径的评估和筛选来实现,只保留那些满足一定约束条件的路径段。这样可以使得最终形成的轨迹更加紧凑和合理。
最后,需要强调的是,本文提供的代码具有可复制性,但售出后一律不退不换。这样的声明是为了保护知识产权和维护学术道德,鼓励学术交流和技术分享。希望读者能够尊重作者的劳动成果,仅供学习参考使用。
综上所述,典型路况下的无人驾驶车辆局部路径规划算法涵盖了地图修改、RRT算法、B样条曲线拟合和剪枝等关键步骤。通过这一算法,无人驾驶车辆可以根据实际情况灵活地规划最优路径,为实现自动驾驶技术的商业化应用奠定了基础。希望本文能够为读者提供有益的技术分析和实践参考,促进无人驾驶技术的进一步发展和应用。
以上相关代码,程序地址:http://wekup.cn/748613204643.html















 255
255

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









