






文章目录
一、前置知识
什么是堆?
如果有一个关键码的集合K={k0, k1, k2, …, kn},它这些关键码按照完全二叉树的顺序存储方式存储到一维数组中,且满足:父节点的值<=子节点的值(或者父节点的值>=子节点的值),则称为小顶堆(或者大顶堆)。
堆的性质
- 父节点的值<=子节点的值(或者父节点的值>=子节点的值)
- 堆是一颗完全二叉树
父子下标关系
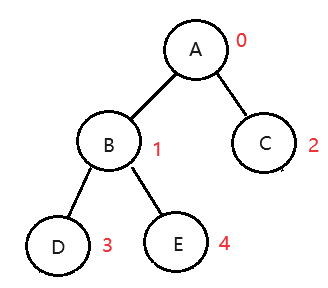
堆的节点是可以存储于数组或者链表中的,若存储于数组中则有如下的坐标关系:
已知父节点下标,找孩子节点下标:
左孩子下标 = 父亲下标 * 2 + 1
右孩子下标 = 父亲下标 * 2 + 2
已知孩子节点下标,找父节点下标:
父亲下标 = (孩子下标 - 1) / 2
堆的定义
typedef int HPDataType;
class Heap{
HPDataType* a;
int size;
int capacity;
}HP;
void HeapInit(HP* php)
{
assert(php);
php->a = NULL;
php->size = php->capacity = 0;
}
void HeapDestroy(HP* php)
{
assert(php);
free(php->a);
php->a = NULL;
php->size = php->capacity = 0;
}
上滤操作(以大堆为例)
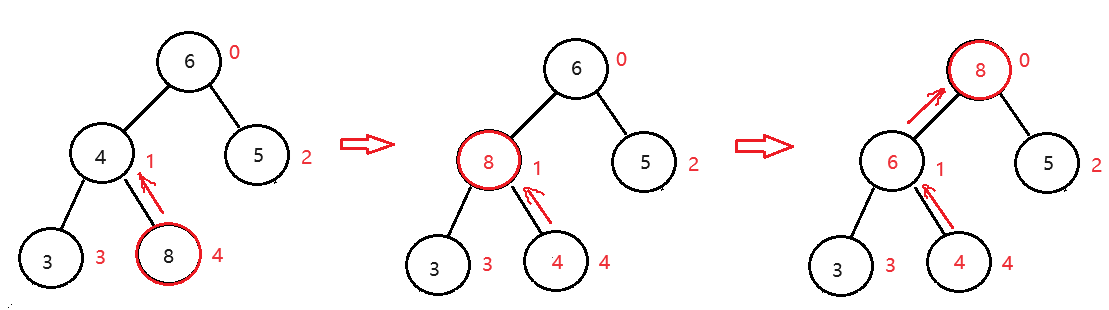
子节点只需要和它的父节点去比较即可,比较完后继续往上遍历。
void Swap(int* p1, int* p2)
{ inttemp = *p1;
*p1 = *p2;
*p2 = temp;
}
// a:参与上滤操作的数组 n:开始上滤的起始位置
void AdjustUp(int* a, int n)
{
int children = n;
int parents = (children - 1)/2;
while(children > 0)
{
// 按大堆规则判断
if(a[children] > a[parents])
{
Swap(&a[children], &a[parents]); // 交换父子
children = parents; // 继续往上找父子关系,判断是否要交换
parents = (children - 1)/2;
}
else break; // 不满足交换条件就退出循环,因为前面的已经满足了堆的条件
}
}
时间复杂度:O(logN)
每遍历一个数据都要和父亲去比较大小,时间复杂度体现在父亲节点和子节点比较的次数,即二叉树的层数O(logN)。
下滤操作(以大堆为例)

画图很容易,但实际上下滤比上滤要麻烦。因为上滤比较的节点只有一个,而下滤比较的节点有两个,分别是左右孩子,比较的原则是:如果是大顶堆,那么就和较大的孩子去比较,让较大的孩子往上挪;如果是小顶堆,那么就和较小的孩子去比较,让较小的孩子往上挪。
// a:参与下滤操作的数组 n:开始下滤的起始位置 size:数组的大小
// 说明:左孩子是一定有的,但右孩子不一定有,且最后一个节点要么是左孩子要么是右孩子
// 后面在进行更新左孩子时要注意判断右孩子是否存在。
void AdjustDown(int* a, int n, int size)
{
int parents = n;
int children = 2*parents + 1;
while(children < size)
{
if(children + 1 < size
&& a[children + 1] > a[children]) // 以大堆为例,如果右孩子更大则更新左孩子
{
children++;
}
if(a[children] > a[parents]) // 和较大的孩子进行交换
{
Swap(&a[children], &a[parents]);
parents = children;// 由于子节点改变了,原来的堆关系也可能发生改变,继续往下找父子关系,判断
children = 2*parents + 1;// 是否要交换
}
else break;
}
}
时间复杂度:O(logN)
每遍历一个数据都要和孩子去比较大小,时间复杂度体现在父亲节点和子节点比较的次数,即二叉树的层数O(logN)。
二、堆的插入
在二叉树的尾部插入节点,注意考虑扩容问题,然后使用上滤操作处理二叉树使其称为大顶堆。
// 堆的插入 时间复杂度:O(logN)
// php:结构体指针,负责改变结构体内部的数据 x:要插入的数据
void HeapPush(HP* php, int x)
{
assert(php);
/* ----------------------判断空间是否足够------------------ */
if(php->size == php->capacity)
{
int newcapacity = php->capacity == 0 ? 4 : 2*php->capacity;
int * newnode = (int *)realloc(php->a, sizeof(int)*newcapacity);
if(newnode == NULL)
{
perror("realloc fail");
return;
}
php->capacity = newcapacity, php->a = newnode;
}
/* -------------------------------------------------------- */
php->a[php->size++] = x;
AdjustUp(php->a, php->size - 1); // 从最后一个元素开始上滤
}
时间复杂度:O(logN)
每插入一个数据都要和父亲去比较大小,时间复杂度就是上滤的时间复杂度O(logN)。
二、堆的删除
堆的删除指的是删除堆顶元素。具体做法是将要删除的元素和最后一个叶子结点进行交换,再删除最后一个叶子结点即可。最后别忘了用下滤重新调整这个二叉树。
// 删除堆顶元素
void HeapPop(HP* php)
{
assert(php);
Swap(&php->a[0], &php->a[php->size-1]);
php->size--;
AdjustDown(php->a, 0, php->size);
}
时间复杂度:O(logN)
从上往下遍历数据都要和孩子去比较大小,时间复杂度就是下滤的时间复杂度O(logN)。
注意:插入用上滤,删除用下滤,原则就是从要处理的新元素开始往上还是往下调整。
三、三种建堆方案
通过插入元素建堆(不推荐)
通过插入元素建堆,每插入一个元素就要上滤调整二叉树。
// 建堆的时间复杂度 O(NlogN)
void testheap1()
{
HP hp;
HeapInit(&hp);
HeapPush(&hp, 1); // 插入的过程中就已经完成了上滤操作
HeapPush(&hp, 6);
HeapPush(&hp, 5);
HeapPush(&hp, 2);
HeapPush(&hp, 10);
HeapPush(&hp, 19);
HeapPush(&hp, 2);
HeapDestroy(&hp);
}
时间复杂度的计算:
| 层数 | 每个节点上滤的层数 | 第h层的总节点数 | 所有节点上滤的层数 |
|---|---|---|---|
| 1 | 0 | 2^0 | 0 * 2^0 |
| 2 | 1 | 2^1 | 1 * 2^1 |
| 3 | 2 | 2^2 | 2 * 2^2 |
| … | … | … | … |
| h-1 | h-2 | 2^(h-2) | (h-2) * 2^(h-2) |
| h | h-1 | 2^(h-1) | (h-1) * 2^(h-1) |
建堆时间复杂度的计算:
F(N) = 0 * 2^0 + 1 * 2^1 + 2 * 2^2 + … + (h-2) * 2^(h-2) + (h-1) * 2^(h-1) …………(1)
2*F(N) = 0 * 2^1 + 1 * 2^2 + 2 * 2^3 + … + (h-2) * 2^(h-1) + (h-1) * 2^(h) …………(2)
(2)-(1):F(N) = - 1 * 2^1 - 1 2^2 - 12^3 - … - 1 * 2^(h-1) + (h-1) * 2^(h)
=−(2 ∗ (1−2^(h1) )) / (1−2) + (h-1) * 2^h
=2 - 2^h + h * 2^h - 2^h
=2^h * (h-2) + 2
假设树有N个节点:则有2^h - 1 = N,可推出h = log(N+1)
所以上式:F(N) = (N+1) * (log(N+1)-2) + 2 ≈ N * log(N)
已有数组,通过上滤建堆(不推荐)
从第二个节点开始往上调整
// 时间复杂度:O(NlogN)
// 在已有数组的情况下,分别对二叉树的每一个节点进行上滤操作
for(int i = 1; i < size; ++i)
{
AdjustUp(php->a, i);
}
时间复杂度和第一种方式其实是一样的。
已有数组,通过下滤建堆(推荐)
叶子结点无需下滤,所以从倒数第二行开始,向下调整。
// 时间复杂度:O(N)
// 建大堆
for(int i = (size-1-1) / 2; i >= 0; --i) // 从倒数第二行开始,向下调整,叶子结点无需下滤
{
AdjustDown(php->a, i, size);
}
时间复杂度的计算:
| 层数 | 每个节点下滤的层数 | 第h层的总节点数 | 所有节点下滤的层数 |
|---|---|---|---|
| 1 | h-1 | 2^0 | h-1 * 2^0 |
| 2 | h-2 | 2^1 | h-2 * 2^1 |
| 3 | h-3 | 2^2 | h-3 * 2^2 |
| … | … | … | … |
| h-1 | 1 | 2^(h-2) | 1 * 2^(h-2) |
| h | 0 | 2^(h-1) | 0 |
建堆时间复杂度的计算:
F(N) = (h-1) * 2^0 + (h-2) * 2^1 + (h-3) * 2^2 + … + 1 * 2^(h-2) + 0 * 2^(h-1) …………(1)
2 * F(N) = (h-1) * 2^1 + (h-2) * 2^2 + (h-3) * 2^3 + … + 1 * 2^(h-1) + 0 * 2^(h) …………(2)
(2)-(1):F(N) = -(h-1) * 2^0 + 1 * 2^1 + 1 * 2^2 + 1 * 2^3 + … + 1 * 2^(h-1) (h)
=-(h-1) * 2^0 + (2 ∗ (1−2^(h1) )) / (1−2)
=1 - h + 2^h - 2
=2^h - h - 1
假设树有N个节点:则有2^h - 1 = N,可推出h = log(N+1)
所以上式:F(N) = N+1 - log(N+1) - 1
= N - log(N+1)
四、堆排序
排降序:要建立小堆,取堆顶元素,和叶子结点进行收尾交换,最后一个节点不看做堆里面的,然后下滤选出次小的节点;…重复上面的操作
代码如下(示例):
// 时间复杂度 O(N + NlogN)
// a为要排序数组
void HeapSort(int* a, int size)
{
// 建立小堆 -> 时间复杂度:O(N)
for(int i = (size-1 - 1) / 2; i >= 0; i--)
{
AdjustDown(a, i, size);
}
// 降序排列 -> 时间复杂度:O(NlogN)
for(int i = size-1; i > 0; i--)
{
Swap(&a[0], &a[i]);
AdjustDown(a, 0, i);
}
}
总结
- 堆排序使用堆来选数,效率就高了很多。
- 时间复杂度:建堆O(N) 排序O(N*logN)
- 空间复杂度:O(1)
- 稳定性:不稳定
应用
topK问题
topK问题: 求数据中的前K个最大元素或者最小元素,一般情况下数据量都很大。
可以先排序,再取前k个吗?如果数据量非常大,第一数据可能不能一下子全部加载到内存,第二对整个数据进行排序,再取前K个,这样的代价太大了。
基本思路如下:
- 用数据集合中的前k个元素来建堆
- 求前k个最大元素,则建小堆
- 求前k个最小元素,则建大堆
- 将剩余的N-K个元素和堆顶元素比较,若要建立小堆,如果比堆顶元素大,则替换堆顶元素进堆;若要建立大堆,如果比堆顶元素小,则替换堆顶元素进堆。
- 剩余的N-K个元素与堆顶元素比较完之后,堆中的k个元素即为所求。
void PrintTopK(int k)
{
const char* file = "data.txt";
FILE* fout = fopen(file, "r");//以读的方式打开文件
if (fout == NULL)
{
perror("fopen fail");
return;
}
//将文件中的前k个数放在数组里面
int* kminheap = (int*)malloc(sizeof(int) * k);
if (kminheap == NULL)
{
perror("malloc fail");
return;
}
for (int i = 0; i < k; i++)
{
fscanf(fout, "%d", &kminheap[i]);
}
//建小堆
for (int i = (k - 1 - 1)/2; i > 0; i--)
{
AdjustDown(kminheap, i, k);
}
//读取剩下的n-k个值
int val = 0;
while (!feof(fout))
{
fscanf(fout, "%d", &val);
// val比堆顶元素大
if (val > *kminheap)
{
*kminheap = val; // 替换堆顶元素
AdjustDown(kminheap, 0, k);
}
}
for (int i = 0; i < k; i++)
{
printf("%d\n", kminheap[i]);
}
}
C++STL 之 priority_queue

模板参数:
T: 容器中元素的类型。
Container: 存储元素的内部底层容器对象的类型。默认缺省容器是vector,STL中的栈和队列不被归纳为容器,而是一种容器适配器(container adapter),它的底层容器实现可以是数组,可以是链表。
Compare: 一种二进制谓词,它将两个元素(T类型)作为参数并返回布尔。
表达式comp(a,b),其中comp是这种类型的对象,a和b是容器中的元素,如果在函数定义的严格弱排序中a被认为在b之前,则应返回true。
priority_queue使用此函数来维护以保留堆属性的方式排序的元素(即,根据这种严格的弱排序,弹出的元素是最后一个)。
这可以是函数指针或函数对象,默认为 less<T>,返回的值与应用小于运算符(a<b)相同。
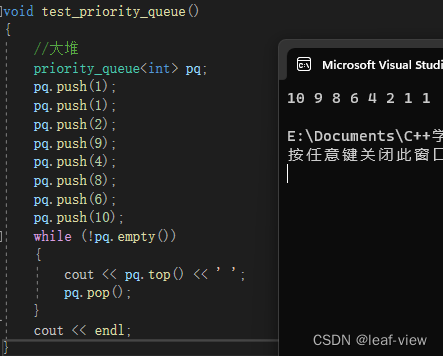
使用实例
我要打印升序,默认less为大顶堆
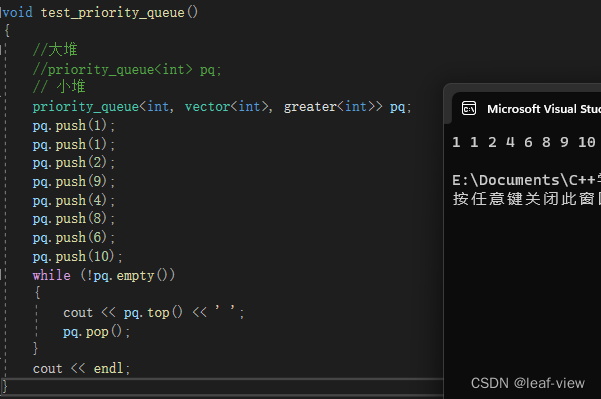
greater为小顶堆
模拟实现
使用容器适配器,可以控制优先级队列的底层容器是数组还是链表;使用仿函数可以控制大小顶堆。
template<class T>
struct less
{
bool operator()(const T& x, const T& y)
{
return x < y;
}
};
template<class T>
struct greater
{
bool operator()(const T& x, const T& y)
{
return x > y;
}
};
template <class T, class container = vector<T>, class Compare = less<T>>
class priority_queue
{
public:
void push(const T& x)
{
_con.push_back(x);
ajust_up(_con.size() - 1);
}
void pop()
{
swap(_con[0], _con[_con.size() - 1]);
_con.pop_back();
ajust_down(0);
}
const T& top()
{
return _con[0];
}
size_t size()
{
return _con.size();
}
bool empty()
{
return _con.empty();
}
void ajust_up(size_t child)
{
Compare com;
size_t parents = (child - 1) / 2;
while (child > 0)
{
//if (_con[parents] < _con[child])
if (com(_con[parents], _con[child]))
{
swap(_con[parents], _con[child]);
child = parents;
parents = (child - 1) / 2;
}
else
break;
}
}
void ajust_down(size_t parents)
{
Compare com;
size_t child = parents * 2 + 1;
while (child < _con.size())
{
//if (child + 1 < _con.size() //考虑右孩子
// && _con[child + 1] > _con[child])
if (child + 1 < _con.size() //考虑右孩子
&& com(_con[child], _con[child + 1]))
{
++child;
}
/*if (_con[child] > _con[parents])*/
if (com(_con[parents], _con[child]))
{
swap(_con[child], _con[parents]);
parents = child;
child = parents * 2 + 1;
}
else break;
}
}
private:
container _con;
};















 313
313

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









