






引子:无人驾驶汽车是在常规汽车发展起来的,是对常规汽车的超越和升级。应该是导向司乘人员更安全和更舒适。至少要比常规汽车更安全安全,否则就不要急匆匆上路。真心希望无人驾驶汽车能厚积薄发、循序汽车渐近,最终行稳致远。

一、无人驾驶汽车的定义、级别和类别
(一)定义
无人驾驶汽车(Autonomous Vehicle, AV)是指通过人工智能、传感器融合、高精度地图、车联网(V2X)等技术,能够在无需人类驾驶员持续干预的情况下,自主完成环境感知、路径规划、决策控制等任务的智能车辆。其核心目标是实现安全、高效、可持续的交通出行。
(二)关键特征:
-
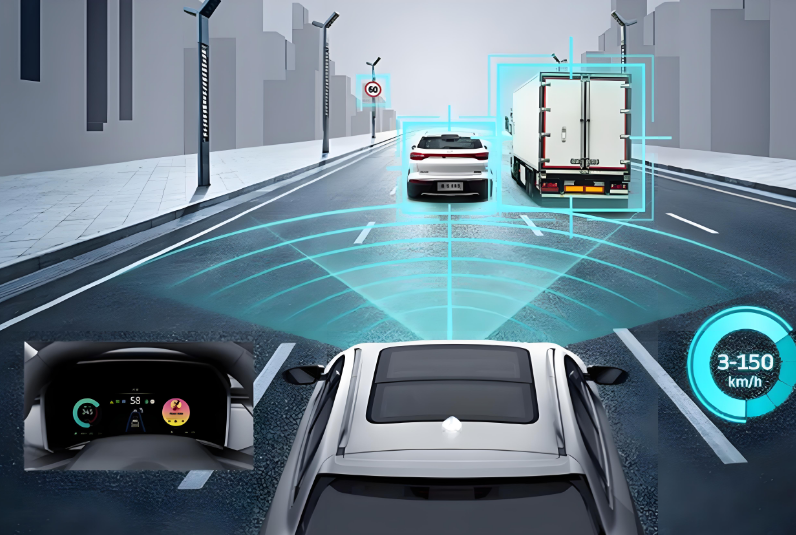
环境感知能力(如识别行人、车辆、信号灯);
-
实时决策与路径规划;
-
车辆控制(转向、加速、制动等)。
(二)级别划分(SAE J3016标准)
国际汽车工程师协会(SAE)的自动驾驶分级标准(L0-L5)是行业通用框架:

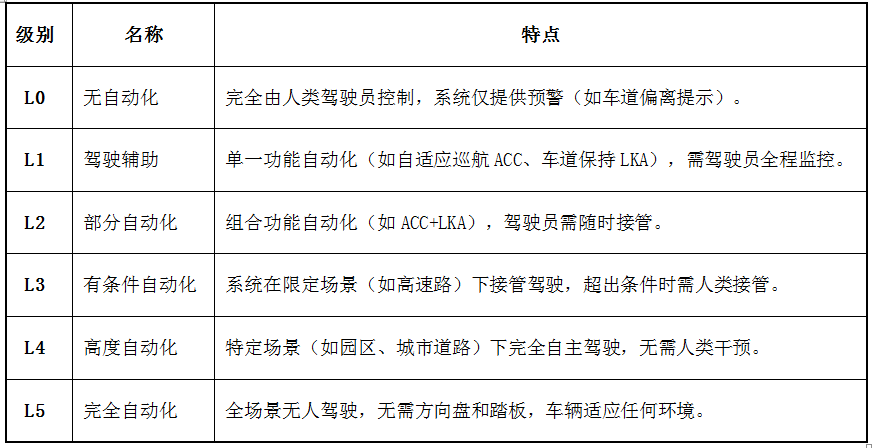
无人驾驶的等级划分
(三)类别划分
根据应用场景和技术路线,无人驾驶汽车可分为以下类别:
1. 按应用场景
1乘用车(Robotaxi/私家车):
-
面向个人出行,如Waymo One(Robotaxi);
-
量产车型,如特斯拉FSD。
2. 商用车(物流与运输):
-
无人配送车:物流车、自动配送车;
-
自动驾驶卡车:港口货运、干线物流;
-
无人环卫车:智能清扫车。
3. 公共交通:
-
无人驾驶公交车(如深圳坪山区);
-
园区/机场接驳车。

4. 按技术路线
-
单车智能(Sensor Fusion):依赖车载传感器(激光雷达+摄像头+毫米波雷达)与AI算法,如特斯拉纯视觉方案。
-
车路协同(V2X):通过5G、路侧单元(RSU)实现车与道路基础设施的实时通信,如中国“车路云一体化”试点。
5. 按商业化阶段
-
封闭场景应用:港口、矿山、园区等低风险场景;
-
开放道路测试:城市道路、高速路测试;
-
量产乘用车:L2+/L3级辅助驾驶逐步普及,L4级仍处于测试阶段。
(四)补充说明
1. 术语区别:
-
自动驾驶(ADAS):泛指L0-L3级技术,以辅助驾驶为主;
-
无人驾驶(AV):通常指L4/L5级,完全无需人类干预。
2. 法规差异:各国对L3级以上车辆的法律责任界定存在差异(如中国要求L3级事故由车企承担部分责任)。
通过定义、级别和类别的系统化梳理,可以更清晰地理解无人驾驶汽车的技术边界与应用潜力。当前行业正处于从L2向L3/L4跨越的关键阶段,未来将在细分场景中加速渗透。
二、无人驾驶汽车发展的现状和应用趋势?
(一)无人驾驶汽车发展现状
1. 技术进展与商业化突破
-
L3级自动驾驶规模化落地:2025年被视作L3级(有条件自动驾驶)技术商业化落地的关键节点。多家车企如特斯拉已宣布量产L3级车型,同时有企业在北京等地开展高快速路“无人化”测试(主驾驶位无需安全员)。
-
多传感器融合技术:激光雷达、毫米波雷达与摄像头等传感器的融合应用显著提升了环境感知的精度和冗余性,例如特斯拉Autopilot系统均采用多模态感知方案。
-
AI算法与车路协同:深度学习和大模型技术的应用加速了决策系统的优化,车路协同技术(如5G云代驾)在试点城市逐步推广,提升了自动驾驶的安全性和可靠性。
2. 政策支持与试点扩展
-
中国政府在2024年发布《智能网联汽车“车路云一体化”应用试点通知》,推动20个城市开展试点,北京、上海等地的测试示范区已开放超200条测试道路、累计测试里程超220万公里。
-
国际层面,英国、美国等国家也加速商业化进程,例如英国允许无人驾驶汽车商用(需有驾照用户使用),美国加州批准L3级自动驾驶系统上路。
3. 市场规模与产业链整合
-
中国无人驾驶汽车市场规模从2023年的118.5亿元(细分领域)或3301亿元(广义市场)持续增长,预计2025年进入产业化爆发期,2029年或突破1200亿元。
-
产业链上下游协同发展:上游(传感器、芯片)由华为、博世等主导,中游(整车制造)以特斯拉、比亚迪为代表,下游(物流、出行服务)如“萝卜快跑”已实现部分商业化盈利。
4. 用户接受度与现存问题
-
超六成消费者认可无人驾驶在减少疲劳和事故方面的优势,但仍有66.6%的用户担忧系统识别能力,54.2%关注责任划分问题。
-
当前成本较高(如激光雷达)和极端天气下的技术稳定性是普及的主要障碍。
(二)应用趋势与未来方向
1. 多元化应用场景拓展
-
物流与运输:无人配送车、长途货运车在电商和港口等封闭场景率先普及,亚马逊等企业已投入实际运营。
-
共享出行:在深圳、北京等城市开展商业化收费运营,预计2025年实现收支平衡。
-
公共交通:无人驾驶公交车在试点城市缓解交通拥堵,未来或与智能交通信号系统联动优化路线。

2. 技术融合与法规完善
-
AI大模型驱动:以ChatGPT为代表的大模型技术将加速自动驾驶算法训练,缩短开发周期,提升复杂场景处理能力。
-
法规标准化:中国L3级自动驾驶标准即将出台,责任划分、保险制度等法律框架逐步完善,例如北京和武汉已发布地方性管理条例。
3. 全球化竞争与产业布局
-
美国(Waymo、特斯拉)和欧洲车企在技术积累上领先,中国凭借政策扶持和市场优势加速追赶。国内企业在车路协同和芯片领域布局,推动全栈技术自研。
-
未来竞争将聚焦于成本控制(如激光雷达降价)和全球化市场渗透。
4. 智能化交通系统构建
车联网(V2X)技术推动车辆与道路基础设施实时交互,未来或实现全域开放场景下的无人驾驶,例如高精度地图与5G/6G通信技术的深度融合。
(三)挑战与风险
-
技术瓶颈:复杂路况实时决策能力、极端天气传感器性能仍需突破。
-
安全与伦理:黑客攻击风险(如车联网漏洞)和事故责任归属问题亟待解决。
-
基础设施适配:现有道路系统需升级以适应无人驾驶需求,例如智能化信号灯和专用车道规划。
无人驾驶汽车正处于技术突破、政策落地与市场爆发的关键阶段,未来将重塑交通出行和城市管理方式,但需在技术成熟度、法规完善度及用户信任度上持续突破。
三、无人驾驶目前面临的最大风险点和挑战
(一)技术与环境层面的核心挑战
1. 环境感知与决策算法的局限性
-
传感器性能受限:激光雷达、摄像头等传感器在雨雪、大雾等恶劣天气下易失效,导致车辆无法准确识别道路障碍物或交通信号。
-
算法鲁棒性不足:现有决策系统在复杂场景(如突发障碍、逆行车辆)中易出现误判,且深度学习算法依赖大量训练数据,部分极端场景数据难以覆盖。
-
极端天气与复杂路况:暴雨或冰雪路面可能导致系统误判标线,甚至引发事故(如北京亦庄自动驾驶出租车暴雨中失控案例)。
2. 高精地图与基础设施适配问题
-
地图更新滞后:道路施工或临时交通管制信息难以及时同步,影响路径规划的准确性。
-
车路协同不足:现有交通信号系统与无人驾驶车辆通信协议不兼容,且车联网(V2X)技术尚未普及,限制了全域协同效率。
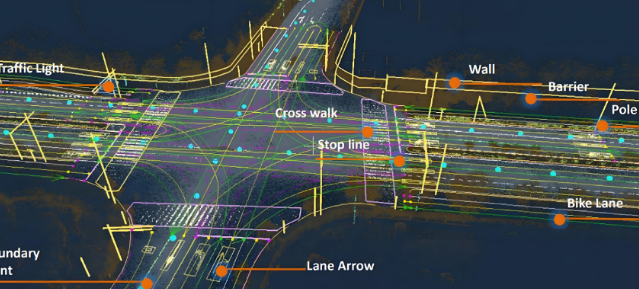
无人 驾驶的核心:实时高精地图
(二)安全与用户信任问题
1. 司乘安全保障的现存漏洞
-
技术漏洞:感知系统易受恶意干扰(如虚假道路线误导车辆逆行),且决策延迟可能导致碰撞风险。
-
人机交互缺陷:驾驶员对系统的过度依赖(55%事故因“过度信任”引发),导致紧急接管能力下降。
-
远程安全员效能:虽然部分城市允许远程监控,但人车比(如1:3)和网络延迟可能影响实时干预效果。
2. 隐私与数据安全风险:车辆收集的海量用户数据存在泄露或滥用风险,且缺乏统一的数据保护标准。
(三)经济与社会的潜在冲突
1. 劳动力替代争议
-
自动驾驶网约车的推广可能冲击传统网约车司机就业,引发社会矛盾(如出租车司机订单减少案例)。
-
低价竞争策略导致驾驶员收入下滑,加剧行业“内卷”。
2. 成本与商业化瓶颈:激光雷达等硬件成本高昂,且充电设施不足制约电动无人驾驶车辆的普及。
(四)司乘人员安全保障的现状与未来
1. 当前保障措施与局限
-
安全员配置:L4级以下车辆普遍要求配备随车或远程安全员,但实际监控效能受限于人车比和响应速度。
-
技术冗余设计:部分企业尝试“安全冗余三明治”架构(如强化学习+实时风险预测+机械制动冗余),但仍需长期验证。
-
法规强制要求:如深圳、北京明确事故责任主体,但执行中仍存在车企与用户间的责任推诿。
2. 未解决的深层次问题
-
技术成熟度不足:现有自动驾驶系统在复杂场景下的可靠性仍低于人类驾驶员,有报告显示行人识别存在“视觉死角”。
-
用户心理信任缺失:多数消费者担忧系统识别能力和责任划分,超六成用户对完全无人驾驶持保留态度。
3. 未来改进方向
-
技术迭代:开发适应极端天气的传感器,优化算法以减少数据依赖,并构建动态责任矩阵(根据事故场景灵活划分责任权重)。
-
政策协同:推动全国性法规统一(如借鉴武汉远程安全员模式),完善保险制度与伦理标准。
-
用户教育:引入“智能驾驶监管能力测试”,强制驾驶员掌握系统失效应急技能,降低过度依赖风险。
(五)小结
无人驾驶的安全保障尚未完全实现,技术漏洞、法规滞后与伦理困境仍是主要障碍。尽管试点项目中通过安全员配置和冗余设计降低了风险,但真正意义上的“无人化安全”仍需突破感知算法、基础设施和用户信任的多重瓶颈。未来需通过技术、政策与社会协同,逐步构建“人-车-路-云”一体化的安全生态。
四、汽车无人驾驶面临的法律和伦理问题
汽车无人驾驶技术的快速发展带来了深刻的法律、道德和伦理挑战。尽管相关讨论和立法尝试不断推进,但这些问题尚未完全解决,仍处于探索和调整阶段。
(一)法律问题:责任划分与立法滞后
1. 责任主体模糊
-
事故责任划分不明确:L3级以下系统需人类接管,但驾驶员可能因过度信任系统而反应延迟(平均4.3秒接管时间,相当于盲行33米);L4/L5级事故则涉及车企、软件提供商等多方责任。
-
当前法律体系以人类驾驶员为中心,而自动驾驶系统(尤其是L4-L5级)的“驾驶主体”地位尚未明确。例如,深圳地方条例规定,无驾驶人期间的事故责任由车辆所有人或管理人承担,但具体操作细则仍待完善。全国性法律仍沿用传统责任划分逻辑,导致跨区域应用时存在冲突。
-
案例:2023年湖北李某酒驾案中,法院认定开启辅助驾驶功能仍需驾驶员担责,凸显现行法规对自动驾驶的“不适应”。
2. 立法进程缓慢
-
地方试点先行:深圳、北京等地已通过地方性法规明确责任划分,但全国性立法仍以《道路交通安全法》修订为主,尚未设立自动驾驶专章。公安部虽表示将推动修订,但涉及24部法律的系统性调整,进展缓慢。
-
法律真空风险:车企因责任不明而转向L2级辅助驾驶研发,L3+级技术商业化受阻。
-
国内多地法规要求L3级以上车辆必须配备随车安全员(如江苏),而武汉、北京等地允许远程安全员模式,导致技术推广受限。国际层面,各国对自动驾驶车辆准入标准、保险制度等存在差异,影响全球化布局。
(注:立法缓慢的深层次原因还是样本量太少,不足以支撑立法。实际上应该启动阶段性立法,或先从行业规范和司法条例开始,逐渐走向真正立法。不建议地方立法:会导致变相地方保护、利益割据,尤其是会导致执法混乱)
3. 保险与赔偿机制缺失
-
现行车险体系未覆盖自动驾驶场景。L4级事故可能涉及车企、软件商等多方责任,但无专项保险制度明确赔偿比例。
-
产品责任认定困难:算法“黑箱”特性导致因果关系证明复杂,用户举证难度大。
(二)道德与伦理困境:算法决策与价值观冲突
1. “电车难题”的算法化争议
-
自动驾驶系统需在紧急情况下权衡乘客与行人安全。例如,奔驰曾公开表示其系统优先保护车内人员,引发伦理争议。
-
德国学者尝试通过算法对生命价值排序(如行人>动物>物体),但“行人之间如何取舍”仍无共识。
2. 算法透明性与公平性
-
伦理决策逻辑缺乏透明度。例如,系统是否应优先保护儿童或弱势群体?此类规则若由厂商单方面设定,可能引发价值观冲突。
-
公众对算法信任度低:调查显示仅30%消费者完全信任自动驾驶系统,担忧其“冷血”决策。
3. 数据隐私与安全风险
-
自动驾驶车辆采集的实时数据(如位置、人脸信息)存在泄露或被黑客操控的风险。2024年某自动驾驶汽车事故中,系统因行人闯红灯误判引发碰撞,暴露数据驱动的算法依赖可能放大安全隐患。
(三)进展与未来方向
1. 法律框架的渐进完善
-
地方立法经验:深圳、北京等地的责任划分模式为全国立法提供参考,如明确“机器驾驶人”定义。
-
国际借鉴:美国加州要求自动驾驶车辆保留人工接管装置,中国或通过分阶段立法(先修订道交法,后专项立法)逐步推进。
2. 技术驱动的伦理解决方案
-
混合感知系统:激光雷达与4D毫米波雷达融合,提升极端场景下的决策可靠性。
-
AI伦理框架构建:部分研究尝试通过大模型生成极端场景数据,优化算法伦理决策能力。
3. 社会共识与公众教育
-
开展“人机共驾”过渡模式试点,通过安全培训减少用户误用风险。
-
政府与企业需共同推动伦理标准公开化,增强算法透明度以提升公众信任。
(四)结论:
1. 司乘安全保障,尚未真正解决,但路径逐渐清晰
2. 无人驾驶的法律、道德和伦理问题仍处于“部分解决”状态:
-
法律层面:地方立法先行,但全国性统一框架尚未形成,责任划分与保险机制仍需突破;
-
伦理层面:算法决策逻辑缺乏社会共识,价值观冲突与数据安全风险依然显著。
未来需通过技术迭代(这个是基础和前提,否则就是视生命如草芥)、立法协同、伦理标准化三轨并行,逐步构建“人-车-路-云”一体化的治理体系。正如专家所言,自动驾驶的终极安全不仅是技术问题,更是社会系统工程。
五、无人驾驶汽车上路行驶的深层次问题与挑战
除法律和伦理等问题以外,尚存在技术可靠性等深层次问题和挑战。
(一)技术可靠性与极端场景适应性
1. 环境感知与决策算法的局限性
-
传感器在极端天气(暴雨、大雾)下性能下降,摄像头误判率可达15%(如误将塑料袋识别为障碍物引发急刹追尾)。
-
算法对长尾场景(如行人闯红灯、动物突然窜出)处理能力不足。例如,百度萝卜快跑在绿灯启动时与闯红灯行人发生轻微碰撞,暴露了系统对突发违规行为的应对缺陷。
2. 车路协同与基础设施适配不足
-
现有道路设施(如信号灯、路标)未针对自动驾驶优化,车联网(V2X)技术普及率低,导致车辆难以实现全域协同。
-
高精地图更新滞后,临时施工或交通管制信息难以及时同步,影响路径规划精度。

3. 网络安全与数据隐私风险
-
车载系统存在被黑客攻击的风险(如特斯拉Model 3曾遭远程操控转向)。
-
每辆无人车日均采集10TB数据,涉及用户行程轨迹、人脸信息等,数据滥用与泄露隐患突出。
(二)社会接受度与产业协同矛盾
1. 公众信任度不足
-
调查显示,仅30%消费者完全信任无人驾驶,超60%担忧系统误判与责任划分。
-
事故频发(如某自动驾驶高速事故致3人死亡)加剧了用户对技术成熟度的质疑。
2. 职业替代与社会公平争议
-
无人货运和出租的推广可能导致数百万司机失业,需配套职业转型支持政策。
-
技术红利分配不均可能加剧区域发展差距,例如封闭场景(港口、矿区)应用快于开放道路,导致就业机会集中流失。
3. 产业链协同与全球化竞争
-
国内车企与国际厂商(如特斯拉)在技术路线(纯视觉vs.激光雷达)和标准制定上存在分歧,需通过法规引导形成统一生态。
-
中国车企出海面临数据合规(如欧盟GDPR)、本地化适配等挑战,亟需构建海外市场共性数据库以降低风险。
(三)经济成本与商业化瓶颈
-
硬件成本高昂:L4级自动驾驶系统成本超20万元,占整车价格1/3,激光雷达降价趋势虽明显,但大规模量产仍需时间。
-
运营模式可持续性不足:无人出租虽在武汉等地实现部分盈利,但全场景商业化仍需突破“长尾成本”问题(如极端天气运维、事故处理成本)。
(四)解决路径与未来方向
1. 立法先行与技术标准统一
-
推动《自动驾驶汽车法》出台,明确责任划分与数据安全要求,借鉴深圳、北京的地方立法经验。
-
建立国家级测试认证体系,统一传感器性能、算法鲁棒性等标准。
2. 技术迭代与生态协同
-
发展混合感知系统(激光雷达+4D毫米波雷达)提升冗余性,利用AI生成极端场景数据优化算法。
-
推进车路云一体化试点,加速5G-V2X通信与智能道路改造。
3. 社会共识与用户教育
-
开展安全培训与公众科普,明确辅助驾驶与自动驾驶的边界,减少用户误用风险。
-
探索“人机共驾”过渡模式,逐步提升用户信任。
六、无人驾驶不能拿性命做实验
汽车作为承载生命的工具,其安全性必须凌驾于任何技术突破或商业利益之上。无人驾驶技术的推进确实需要以"生命至上"为绝对前提,而非用统计学意义上的"相对安全"掩盖潜在风险。当前行业仍需直面以下核心矛盾:
(一)技术研发与生命伦理的深层冲突
1. 算法决策的"冷血悖论"
-
自动驾驶系统基于概率模型做出决策,可能将人类生命简化为风险系数。例如,特斯拉FSD Beta在紧急避让时选择"最小伤亡路径",这种功利主义算法逻辑本质上是对生命价值的量化排序,与公众伦理认知产生根本冲突。
-
企业常以"事故率低于人类驾驶员"为技术辩护,但统计学优势不能成为道德豁免权——即便事故率降低90%,对遭遇那10%事故的家庭而言仍是100%的灾难。
2. 测试阶段的"人性化缺失"
-
部分企业采用"影子测试"模式(在量产车上收集数据),实际上让普通用户成为未经充分告知的测试参与者。2023年美国NHTSA数据显示,特斯拉Autopilot相关事故中,81%发生在非专业测试人员驾驶时。
-
封闭场景测试无法覆盖真实道路的复杂性,但开放道路测试又必然涉及公共安全风险,形成"测试悖论"。
(二)产业实践的道德失范现象
1. 技术包装误导消费者
-
车企滥用"自动驾驶"营销话术,导致用户对L2级辅助驾驶功能产生过度信任。2024年中国消协调查显示,43%的消费者误认为L2级车辆可完全自主驾驶。
-
责任转嫁设计:某些系统在事故后自动删除关键数据(如某事故中的EDR数据覆盖争议),实质是技术不成熟下的责任规避。
2. 资本驱动下的"野蛮生长"
-
风险投资倒逼技术快速商业化,导致安全验证周期被压缩。Waymo测试里程突破3200万公里才允许载客,而某些企业仅数百万公里测试即开放运营。
-
硬件成本压缩引发安全隐患:为降低激光雷达成本,部分厂商采用低线数雷达(如16线替代128线),牺牲感知精度。
(三)构建生命优先的技术伦理框架
1. 技术层面的"零容忍"安全设计
-
安全冗余强制标准:要求感知系统(激光雷达+4D毫米波雷达+摄像头)、决策系统(双芯片异构计算)、执行机构(线控三备份)均实现物理级冗余。
-
死亡场景模拟库:建立国家级极端案例数据库,强制算法通过所有预设死亡场景测试方可上路。
2. 法律层面的"生命优先"原则
-
举证责任倒置:事故发生后车企需自证无技术缺陷,否则承担全部责任。
-
技术透明法案:强制公开算法决策逻辑与测试数据,接受第三方伦理委员会审查。
3. 社会监督机制创新
-
公民陪审团制度:由公众代表参与技术路线评审,对涉及生命权衡的算法逻辑行使否决权。
-
黑匣子强制云同步:车辆运行数据实时上传至政府监管平台,防止证据篡改。
(四) 行业必须直面的终极拷问
1. 技术是否具备"敬畏生命"的能力?
当系统必须在保护乘客与行人之间做出选择时,任何算法优化都是对生命价值的亵渎。真正安全的自动驾驶不应存在此类选择,而是通过技术手段彻底规避极端场景。
2. 商业利益能否让渡于人性底线?
企业需要重新定义发展逻辑:不是"证明自动驾驶比人类更安全",而是"绝对避免本可预防的死亡"。这可能需要放弃某些市场窗口期,但这是对生命的起码尊重。
(五)结语
汽车工业史上,三点式安全带、ABS等突破都源于对生命的敬畏。无人驾驶技术若想真正造福人类,必须回归"守护生命"的本质——这不是通过概率计算实现的"相对安全",而是以绝对安全为不可逾越红线的技术信仰。当我们谈论自动驾驶时,不应是冷冰冰的事故率对比,而应是每个生命都能被技术温柔以待的未来。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











