







欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。
一项目简介
一、项目背景与意义
本项目旨在通过Matlab平台实现尺度不变特征变换(SIFT)算法和扩展卡尔曼滤波(EKF)姿态估计算法。SIFT算法在图像处理中广泛应用于图像配准、目标识别等领域,而EKF姿态估计算法则在机器人视觉、动作跟踪等领域发挥着重要作用。通过结合这两种算法,本项目旨在探索图像处理和姿态估计技术的实际应用,为相关领域的研究和应用提供技术支撑。
二、SIFT算法实现
算法原理
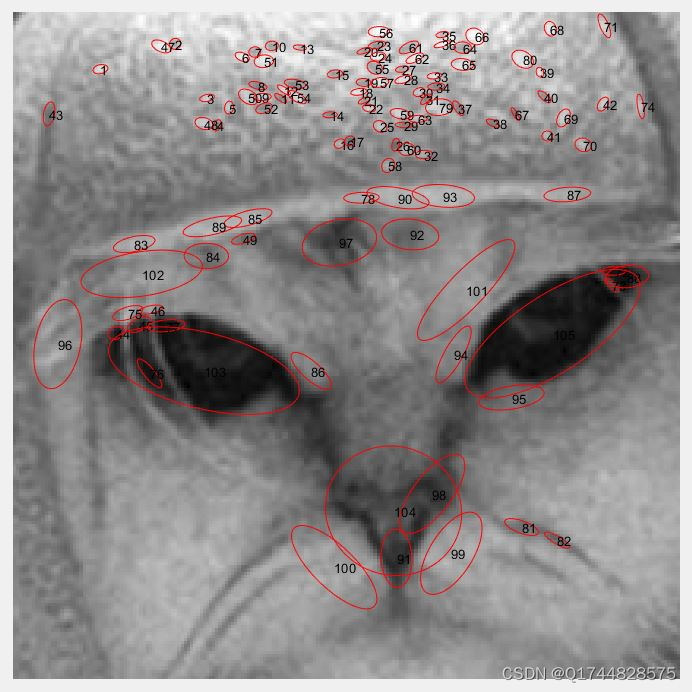
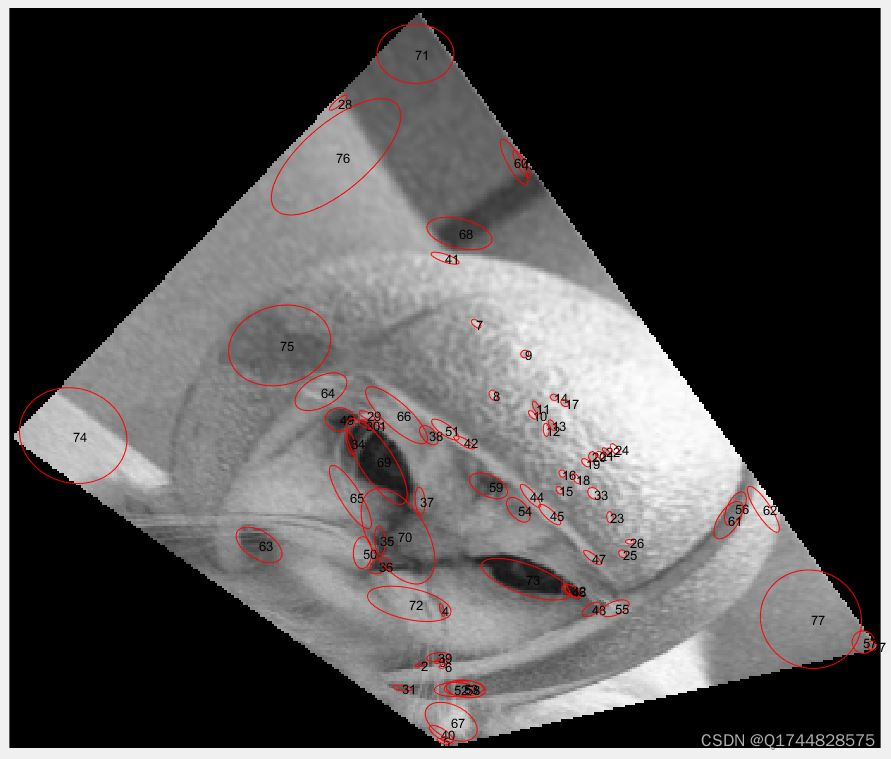
SIFT算法是一种用于图像处理和计算机视觉领域的特征提取算法。它能够提取出具有尺度不变性和旋转不变性的关键点(特征点),并生成它们的描述子。
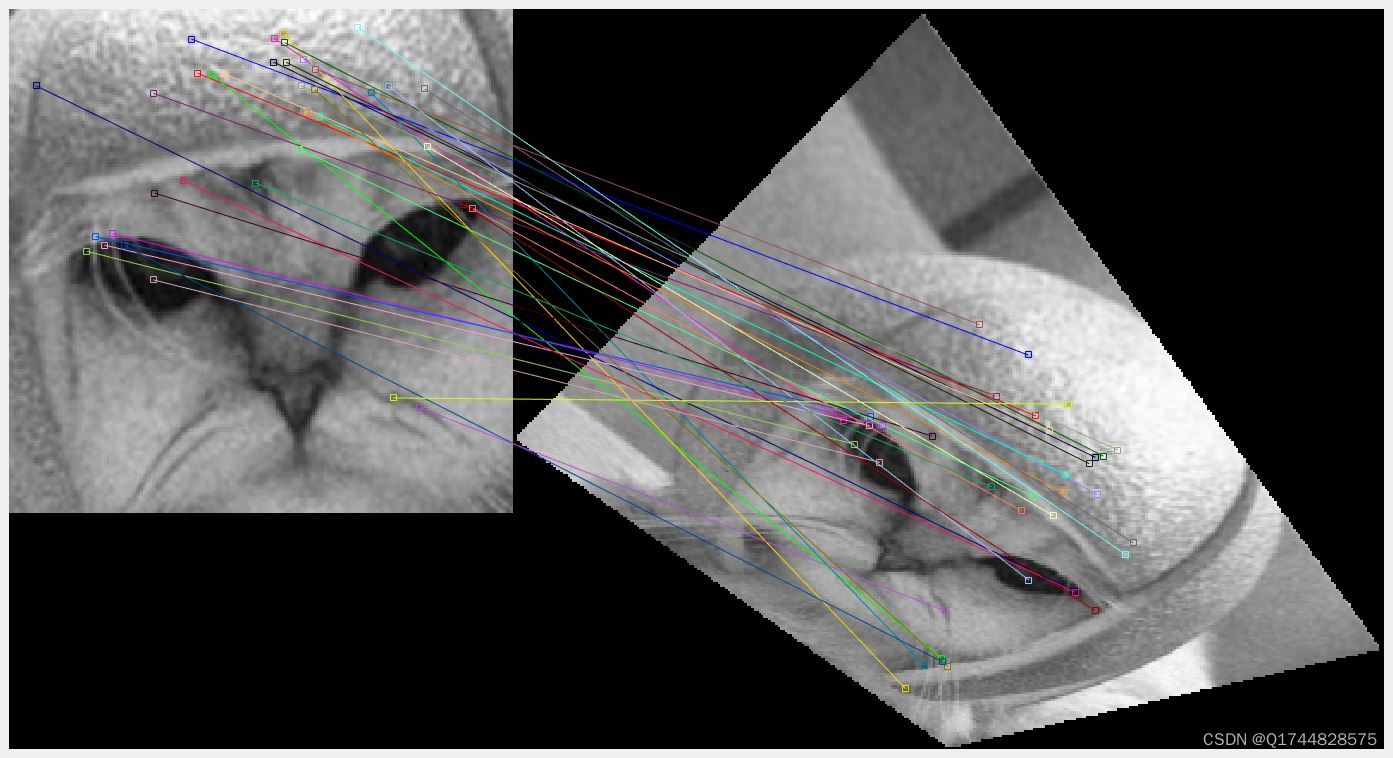
主要步骤包括尺度空间极值检测、关键点定位、方向分配、特征描述和特征匹配。
Matlab实现
利用Matlab编程语言,实现SIFT算法的主要步骤,包括构建尺度空间金字塔、检测局部极值点、计算梯度方向直方图、生成特征描述子等。
结合Matlab图像处理工具箱,实现图像读取、预处理和特征匹配等功能。
三、姿态估计算法实现
算法原理
EKF算法是基于卡尔曼滤波器的扩展版本,适用于非线性系统。姿态估计的过程可以分为预测和更新两个阶段。
在预测阶段,根据系统的动力学模型和先验信息来预测姿态的状态;在更新阶段,借助传感器测量值来校正预测的状态。
Matlab实现
利用Matlab编程语言,实现EKF姿态估计算法的主要步骤,包括初始化变量和参数、预测阶段(更新状态向量和协方差矩阵)、更新阶段(获取传感器测量值、计算观测矩阵和观测噪声、计算卡尔曼增益等)。
结合Matlab的控制系统工具箱和传感器融合技术,实现姿态估计的实时处理和精度优化。
四、项目特点
技术先进性:SIFT算法和EKF姿态估计算法都是图像处理和姿态估计领域的经典算法,具有广泛的应用前景和实用价值。
算法可靠性:SIFT算法对于光照、噪声等干扰具有较强的鲁棒性,而EKF算法则能够有效地处理非线性系统的姿态估计问题。
实时性高:通过优化算法实现和代码编写,本项目能够在Matlab平台上实现SIFT算法和EKF姿态估计算法的实时处理,满足实际应用的需求。
可扩展性强:本项目的代码结构清晰、易于理解和扩展,可以方便地添加新的功能和算法模块,以适应不同的应用场景和需求。
二、功能
基于Matlab实现SIFT和姿态估计算法
三、系统
四. 总结
本项目基于Matlab平台实现了SIFT算法和EKF姿态估计算法,并探索了这两种算法在图像处理和姿态估计领域的应用。通过本项目的实践,我们验证了这两种算法的有效性和可靠性,并为其在相关领域的研究和应用提供了技术支撑。未来,我们将继续优化算法实现和代码编写,提高算法的实时性和精度,同时探索更多的应用场景和需求。















 1213
1213

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









