







欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。
一项目简介
一、项目背景与意义
随着汽车智能化水平的不断提高,车道保持和转向辅助成为了现代汽车安全驾驶的重要组成部分。本项目旨在利用Python和OpenCV库,构建一个实时、准确的车道检测系统,以辅助驾驶员进行车道保持和转向操作,并在车辆无意识偏离车道时提供及时预警,从而提高驾驶安全性和舒适度。
二、技术框架与工具
Python:作为本项目的编程语言,Python提供了丰富的库和工具,便于数据处理和算法实现。
OpenCV:OpenCV是一个开源的计算机视觉库,提供了图像处理、目标检测、特征提取等功能,是本项目中的核心库。
三、系统组成与工作原理
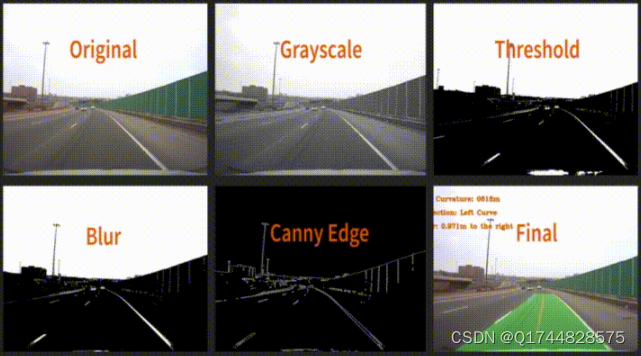
图像采集与处理:
通过车载摄像头实时采集道路图像。
使用OpenCV对图像进行预处理,包括灰度化、高斯滤波等,以减少噪声和细节,提高后续处理的准确性。
车道线检测:
利用Canny边缘检测算法获取车道线的边缘信息。
应用霍夫变换(Hough Transform)或概率霍夫变换(Probabilistic Hough Transform)检测直线,即车道线。
通过离群值过滤和最小二乘拟合等方法,将检测到的线段拟合成左右两条车道线。
车道状态分析
计算车道的曲率和车辆相对于车道中心的位置。
判断车辆是否无意识偏离车道,并在需要时触发预警机制。
转向辅助
根据车道状态分析的结果,为驾驶员提供转向建议或自动调整车辆的转向角度,帮助车辆保持在车道内。
预警机制
当车辆无意识偏离车道时,系统通过声音、视觉或触觉方式向驾驶员发出预警。
四、项目特点与优势
实时性:采用高效的图像处理算法和优化的代码实现,确保系统能够实时地检测和分析车道状态。
准确性:结合多种图像处理技术和算法,提高车道线检测的准确性和可靠性。
安全性:及时的车道偏离预警和转向辅助功能有助于减少交通事故的发生,提高驾驶安全性。
适应性:系统能够适应不同的道路条件和天气情况,具有良好的鲁棒性和可扩展性。
易用性:系统提供简洁的用户界面和交互方式,方便驾驶员进行操作和监控。
二、功能
基于Pyhon+OpenCV的转向辅助和车道偏离监控的车道检测
三、系统

四. 总结
提高驾驶安全性和舒适度,减少因车道偏离和转向不当引发的交通事故。
为智能驾驶和自动驾驶技术的发展提供有力的技术支持和实验验证。
推动计算机视觉和图像处理技术在汽车安全领域的应用和发展。















 249
249

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









