







基于YOLOv8 Pose的指针式仪器仪表读数识别技术解析
指针式仪器仪表在工业、能源、医疗等领域广泛应用,但其读数依赖人工操作,存在效率低、易出错等问题。结合YOLOv8 Pose(关键点检测模型)与计算机视觉技术,能够实现自动化、高精度的仪表读数识别。以下从技术框架、核心流程、优化方法及应用场景等方面展开分析。
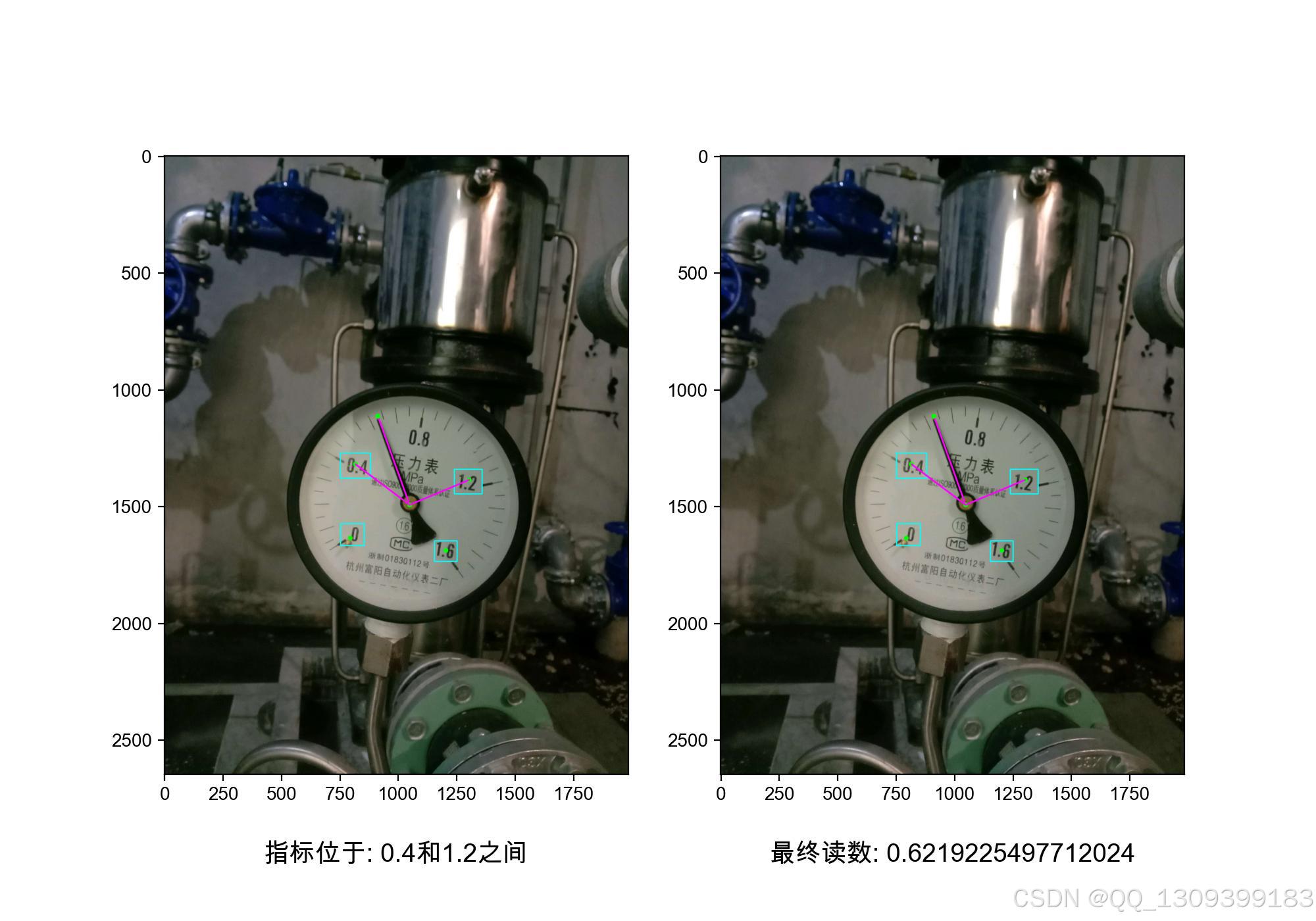
读数效果

运行教程
1.pycharm终端输入
pip install -r requirements.txt
2.pycharm终端输入
python predict.py
一、技术框架与核心流程 内容仅供参考 具体见结果展示
-
仪表检测与关键点定位
基于YOLOv8的目标检测模块,首先从复杂背景中定位仪表表盘区域。YOLOv8的高效检测能力(如改进的C2f模块和动态检测头)可快速识别不同规格的仪表。随后,通过YOLOv8 Pose模型检测指针的关键点(如头部和尾部),并结合刻度线的位置信息,为后续计算提供几何基础。
-
数据预处理与极坐标转换
检测到表盘后,需进行透视矫正或极坐标变换,将圆形表盘展开为矩形图像。例如,以指针尾部关键点为原点建立极坐标系,通过球坐标转直角坐标的方式消除旋转影响,便于线性分析指针位置。部分研究采用旋转YOLOv8模型直接处理旋转目标,避免复杂的后处理步骤。 -
刻度识别与读数计算
- 刻度OCR识别:使用PaddleOCR等工具识别展开后的刻度数值,结合语义分析筛选有效量程(如0-1.6MPa或0-100℃)。
- 指针角度计算:通过关键点坐标计算指针与零刻度线的夹角,结合量程范围,按比例计算实际读数。例如,若量程为50,指针占比25%,则读数为12.5。
二、关键技术优化
-
模型结构改进
- 注意力机制增强:在YOLOv8主干网络中添加EMA(高效多尺度注意力)或CBAM模块,提升对指针和刻度线的特征提取能力。
- 旋转目标检测:采用旋转YOLOv8网络,通过旋转IoU损失函数优化角度预测,解决传统模型对倾斜目标的检测偏差问题。
-
小目标检测优化
针对指针尖端和细小刻度线,在检测头中添加160×160小目标检测层,并采用Slim-Neck结构优化特征融合,提升细节捕捉能力。 -
多任务联合训练
将目标检测(表盘、指针)、关键点检测(指针端点)和OCR识别(刻度值)联合训练,通过共享特征层减少推理耗时,提高端到端系统的鲁棒性。

三、数据集与训练策略
-
数据集构建
- 标注要求:使用LabelMe或LabelImg标注表盘区域、指针关键点(头部和尾部)及刻度数值。关键点标注需保持顺序一致性以支持角度计算。
- 数据增强:通过随机旋转、光照调整、透视变换等模拟复杂环境,提升模型泛化性。
-
模型训练
- 迁移学习:加载YOLOv8预训练权重(如yolov8n.pt),针对仪表数据微调模型参数,减少训练时间。
- 损失函数设计:结合分类损失、关键点回归损失和旋转角度损失,优化多任务学习效果。
四、应用场景与挑战
-
工业自动化
在油田、电厂等场景中,系统可实时监测仪表数据,异常时自动报警,替代人工巡检。例如,燧机科技的解决方案已用于工厂的实时监控。 -
医疗与能源
适用于血压计、压力表等设备的自动化读数,减少人为误差。博易盈公司的旋转YOLOv8专利技术已在医疗设备中试点应用。 -
挑战与展望
- 复杂环境干扰:光照变化、表盘污损等因素可能影响检测精度,需结合图像增强和鲁棒性更强的模型。
- 多类型适配:不同仪表的量程、刻度分布差异较大,需设计通用化算法框架。未来可结合生成对抗网络(GAN)合成多样化训练数据。
五、代码实现与工具集成
-
开发工具链
- 使用PyQt或Streamlit构建交互界面,支持图像上传、实时检测和结果可视化。
- 集成OpenCV进行图像预处理(如透视变换)和结果后处理(如角度计算)。
-
示例代码片段
from ultralytics import YOLO # 加载预训练模型 model = YOLO('yolov8n-pose.pt') # 推理与关键点提取 results = model.predict(source='meter.jpg') keypoints = results[0].keypoints # 获取指针端点坐标
总结
基于YOLOv8 Pose的指针式仪表读数技术,通过目标检测、关键点定位和OCR识别的多模块协同,实现了高精度自动化读数。未来,随着旋转检测、小目标优化等技术的进一步突破,该技术将在工业4.0和智能设备领域发挥更大作用。开发者可参考开源项目(如Ultralytics YOLOv8)快速构建原型,并结合实际需求优化模型结构与数据处理流程。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









