









YOLOv8 空中绵羊检测与计数系统(Gazebo仿真)
项目简介
本仓库包含基于YOLOv8算法训练的绵羊检测与计数模型,数据集来自R,并集成Gazebo仿真环境实现无人机空中巡检模拟-YOLOv8-Sheep-Detection-Counting
。
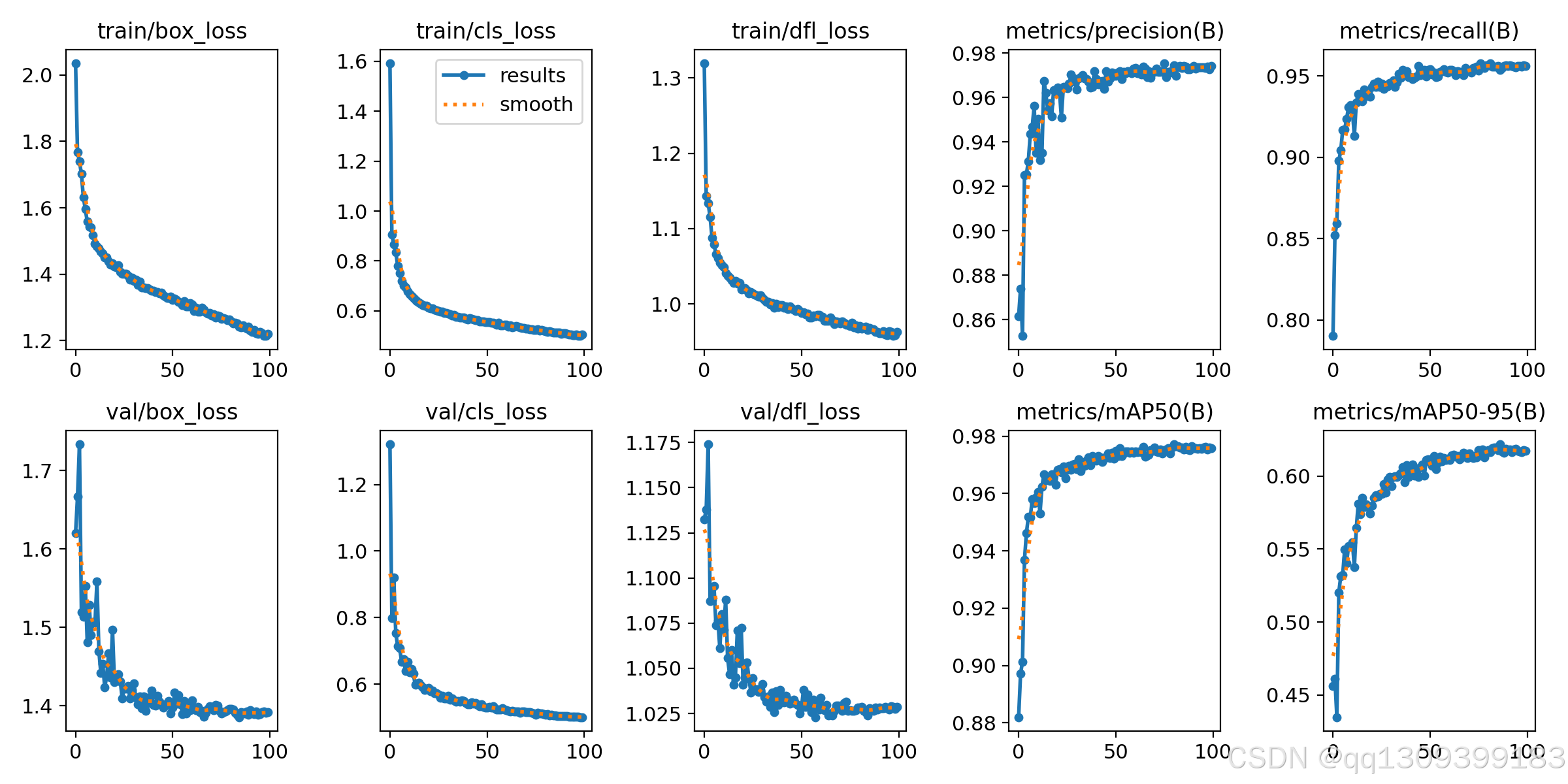
训练结果
- 模型:YOLOv8n
- 权重路径:
resources/weights/ - 训练效果图示:
YOLOv8-Sheep-Detection-Counting

安装步骤
-
创建虚拟环境
# 创建环境 python -m venv yolov8-sheep # 激活环境(Linux/macOS) source yolov8-sheep/bin/activate -
安装依赖
pip install -e '.[dev]'
运行检测
- 图片检测
python count.py - 视频检测
python track.py修改脚本中
file_path参数指向你的文件,示例数据在resources/images/和resources/videos/中。
Gazebo仿真步骤
-
环境配置
- 按此教程配置测试环境,或直接使用提供的模型与世界文件(
resources/models/、resources/worlds/)。
- 按此教程配置测试环境,或直接使用提供的模型与世界文件(
-
启动仿真
- 终端1:加载Gazebo世界
roslaunch gazebo_ros agriculture.launch - 终端2:启动无人机(ArduCopter)
cd ~/ardupilot/Tools/autotest && ./sim_vehicle.py -v ArduCopter -f gazebo-iris -I0- 在控制台看到
APM: EKF2 IMU0 is using GPS后,输入以下指令起飞:mode guided arm throttle takeoff 40
- 在控制台看到
- 终端3:运行检测程序
python sheep.py
- 终端1:加载Gazebo世界
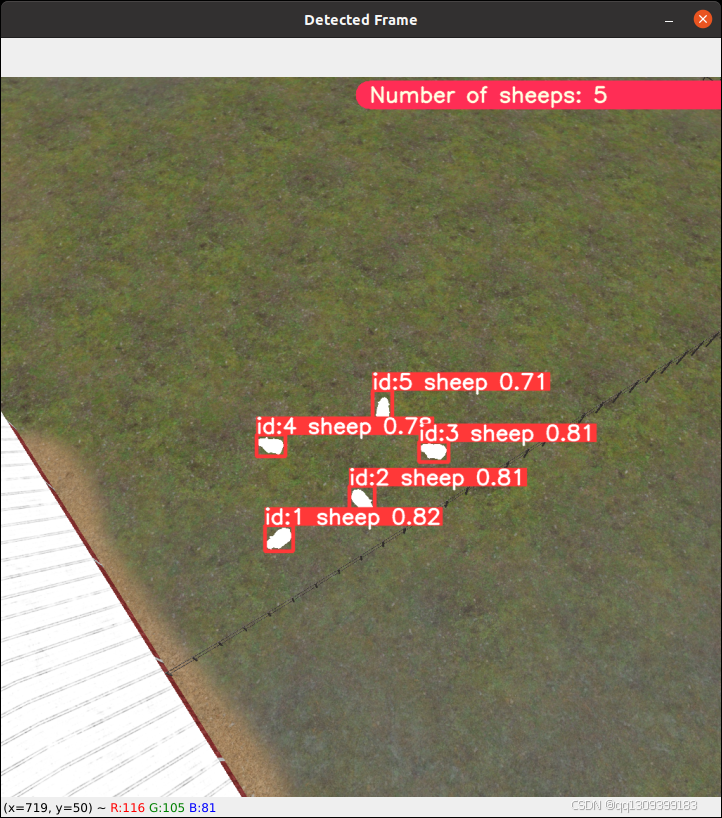
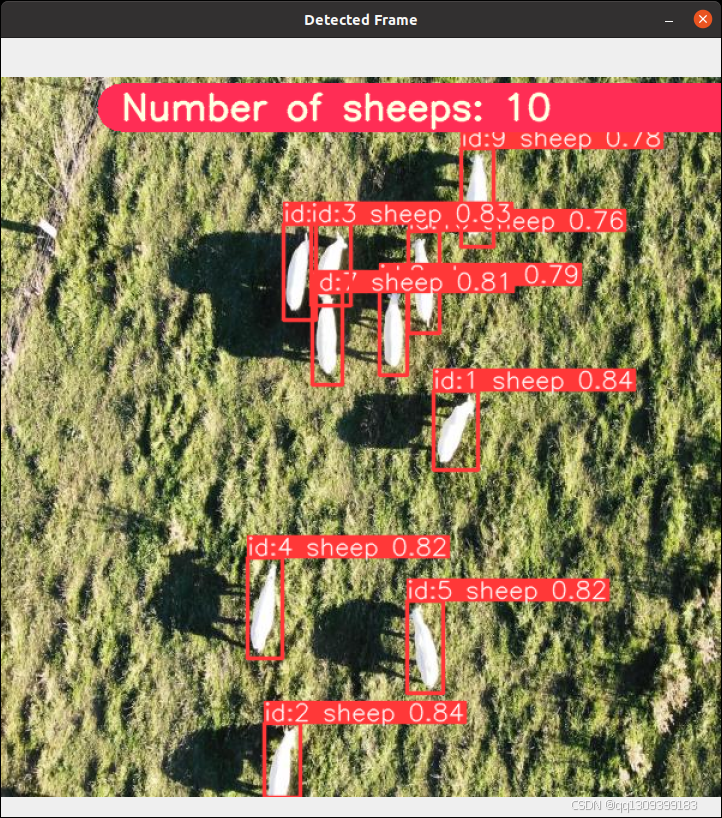
效果演示
参考仓库中的演示文件。
关键术语说明
- Gazebo:机器人仿真工具,用于模拟无人机飞行与传感器数据。
- ArduCopter:开源无人机飞控系统,支持Gazebo硬件在环仿真。
- YOLOv8n:YOLOv8的轻量级版本,适合边缘设备部署。
如需进一步优化或扩展功能(如实时数据传输),可联系开发者!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









