







基于无人机的监控目标检测
项目描述
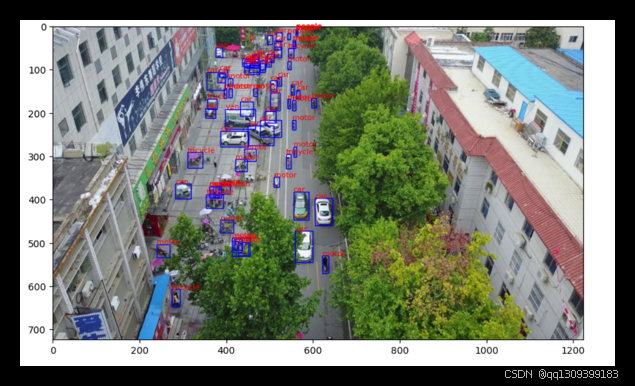
本项目旨在利用多种计算机视觉模型,精准检测无人机拍摄图像中的车辆。我们采用2019数据集进行实验,该数据集包含由无人机在不同地点、环境和天气条件下拍摄的带标注图像与视频。我们评估了包括Faster RCNN、Mask RCNN、SSD、YOLOv3、YOLOv5和YOLOv8在内的多个主流模型的性能,并对比了它们的检测效果。研究结果揭示了不同模型在无人机图像车辆检测任务中的优劣特性。

快速入门
要使用本仓库中的代码,请按以下步骤操作:
- 在支持GPU的环境(如Google Colab、Kaggle或本地高性能GPU设备)中打开对应笔记本。
- 按照笔记本内的指引训练和测试模型。
使用方法
本仓库包含三个核心实现:
---------------点击下方图片播放---------------原始视频---------------YOLOv8演示预测视频(原始)
- YOLO系列(v3/v5/v8):相关笔记本实现了无人机监控场景的目标检测。
- 打开对应笔记本,按指引运行即可训练和测试模型。
- 打开对应笔记本,按指引运行即可训练和测试模型。
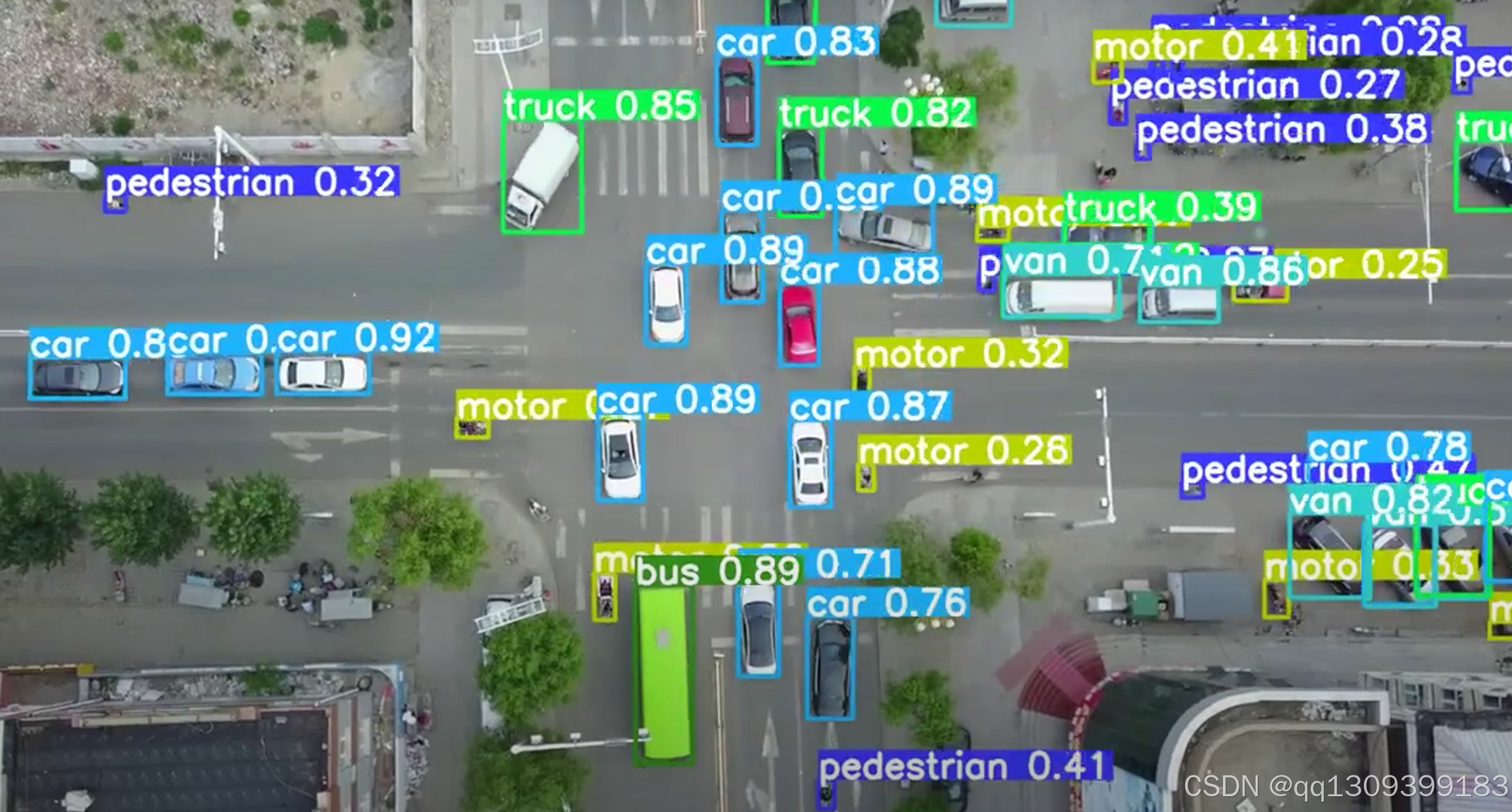
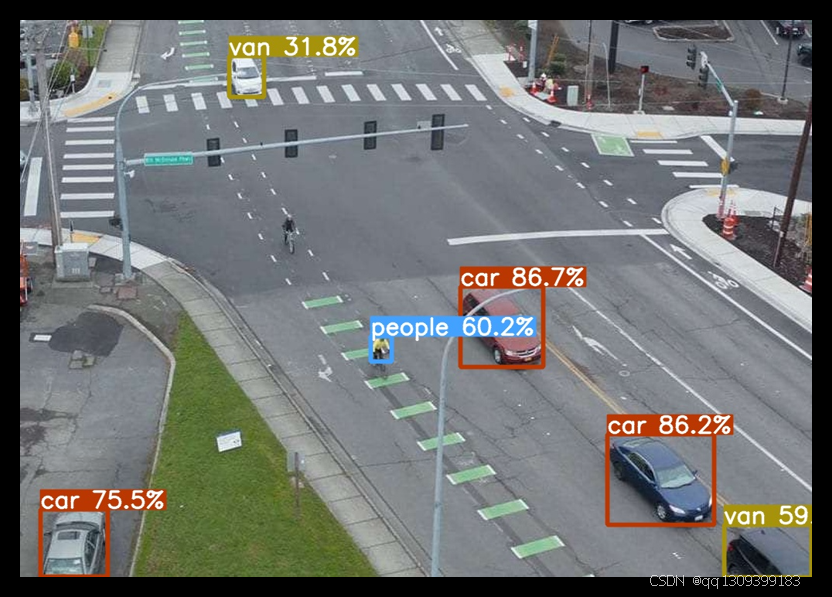
---------------点击下方图片播放---------------检测结果视频---------------YOLOv8演示预测视频(结果)
数据集 无人机数据集**。各笔记本中已内置数据集加载与预处理流程,您可直接在Google Colab、Kaggle或GPU设备上运行全部代码。
支持模型
YOLO系列
- YOLOv3
- YOLOv5
- YOLOv8
其他模型
- SSD
- Faster RCNN
- Mask RCNN
- RCNN
性能对比
| 算法 | mAP@0.5 | 推理时间(毫秒) |
|---|---|---|
| SSD | 0.12 | 30 |
| Faster-RCNN (Resnet50) | 0.23 | 150 |
| Faster-RCNN (Resnet50-FPN) | 0.27 | 170 |
| Mask-RCNN | 0.29 | 200 |
| RCNN with Resnet50 | 0.30 | 190 |
| YOLOv3 | 0.40 | 22 |
| YOLOv5-Small | 0.46 | 6.4 |
| YOLOv5-Extra-Large | 0.54 | 12.1 |
| YOLOv8-Small | 0.46 | 1.20 |
| YOLOv8-Extra-Large | 0.56 | 3.53 |
结论
通过对比模型在阈值0.5下的平均精度(mAP)和推理速度(FPS),我们得出:
- YOLOv8-Extra-Large 以0.56的mAP达到最高精度
- YOLOv8-Small 以1.20毫秒的推理速度成为最快模型
实际应用中需根据场景需求权衡精度与速度:高精度任务推荐YOLOv8-Extra-Large,实时性要求高则优先选择YOLOv8-Small。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









