






论文作者:Stella Dumenčić,Luka Lanča,Karlo Jakac,Stefan Ivić
作者单位:University of Rijeka
论文链接:http://arxiv.org/abs/2502.17372v1
内容简介:
1)方向:基于无人机(UAV)在搜索与救援(SAR)
2)应用:SAR任务
3)背景:在SAR任务中,寻找幸存者通常面临地形复杂、环境恶劣等挑战,传统的人工搜索方法效率低下且存在安全隐患。因此,引入无人机进行搜索成为提升效率和安全性的重要手段。
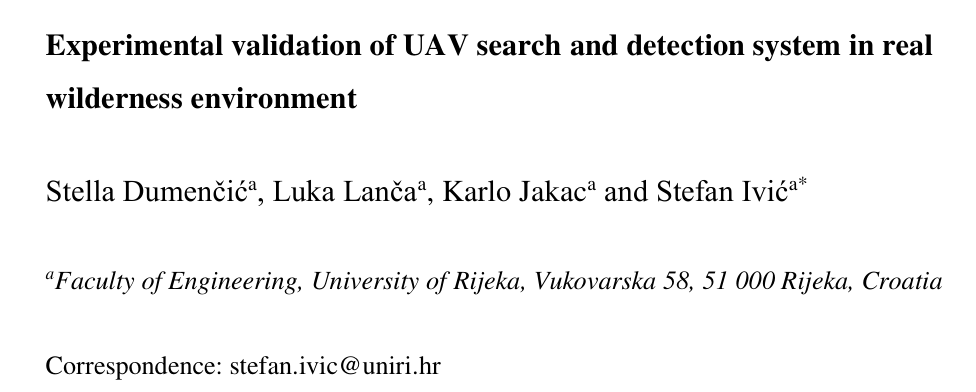
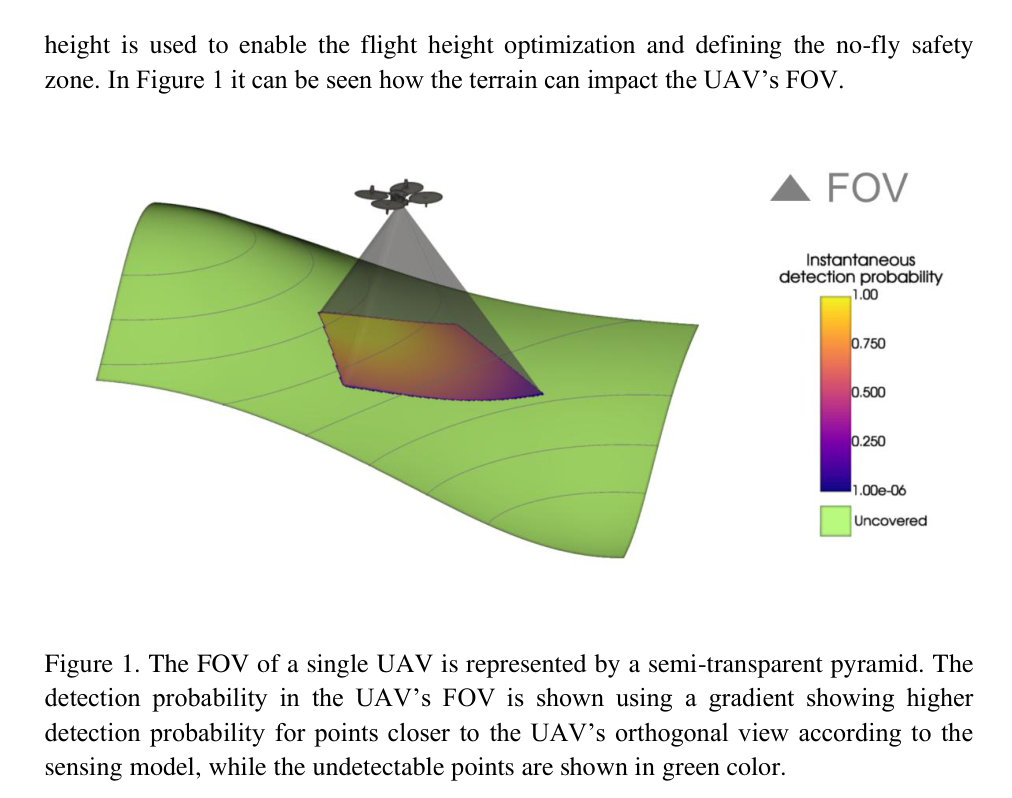
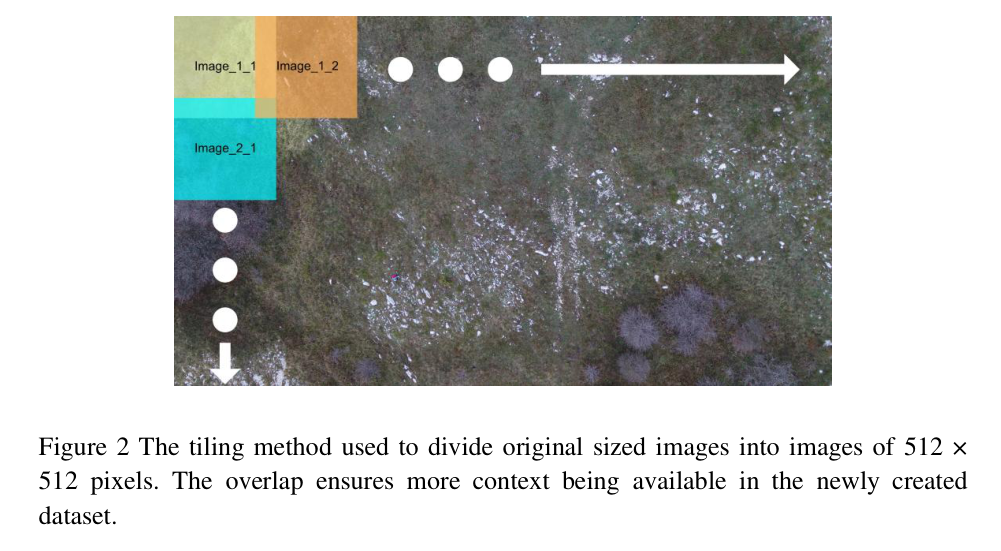
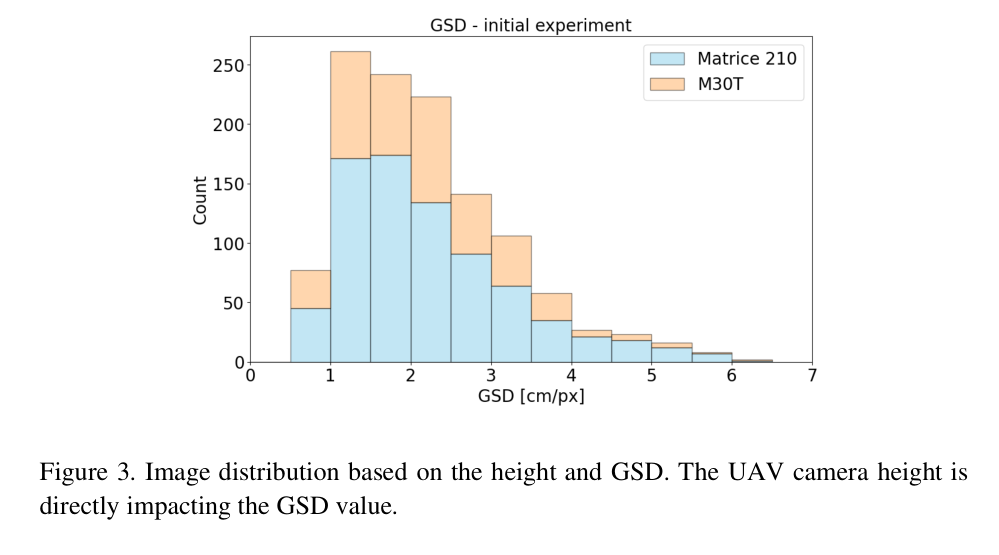
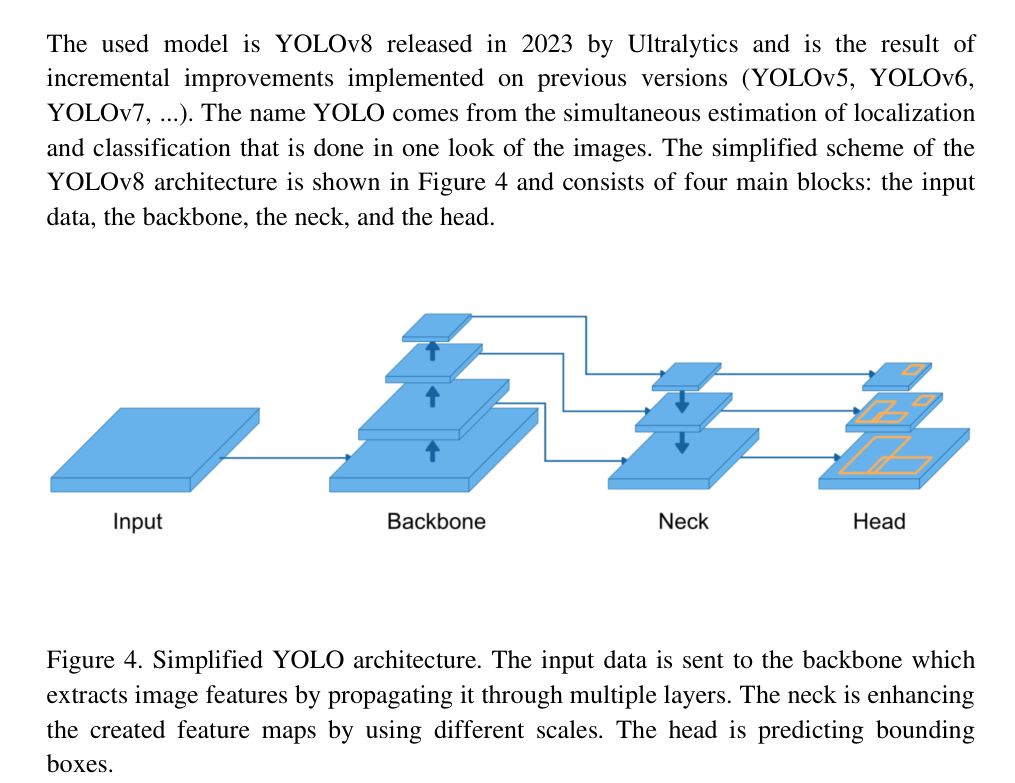
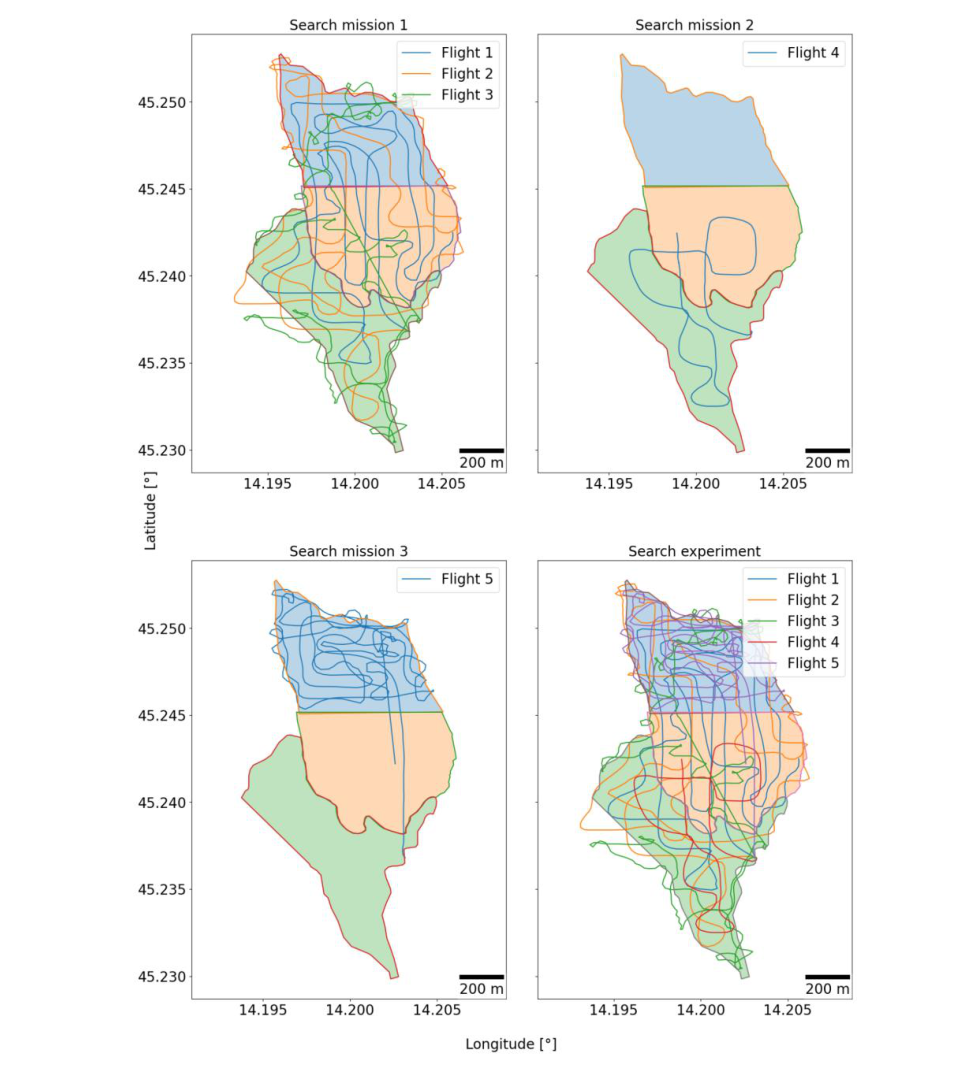
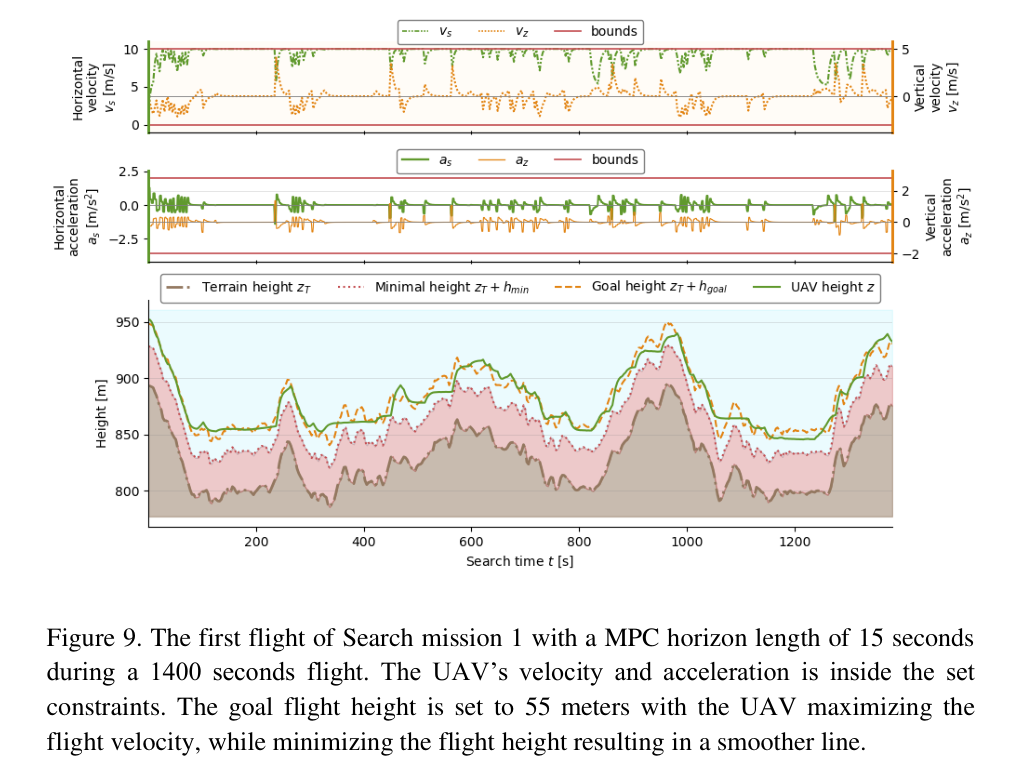
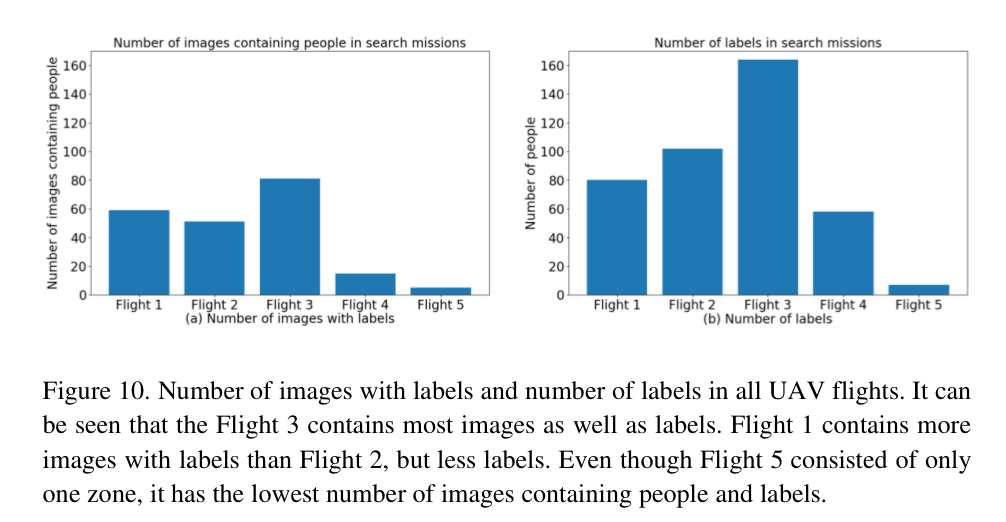
4)方法:本文提出并实验了一种基于热方程驱动的区域覆盖(HEDAC)控制方法,该方法利用已知的概率密度和检测函数,指导无人机进行区域内的目标搜索。该系统包括概率搜索模型、运动控制系统和计算机视觉目标检测,能够计算目标在SAR任务中的检测概率。该方法的实验验证中,还使用了YOLO检测模型,并在之前收集的正射影像数据库上进行训练。
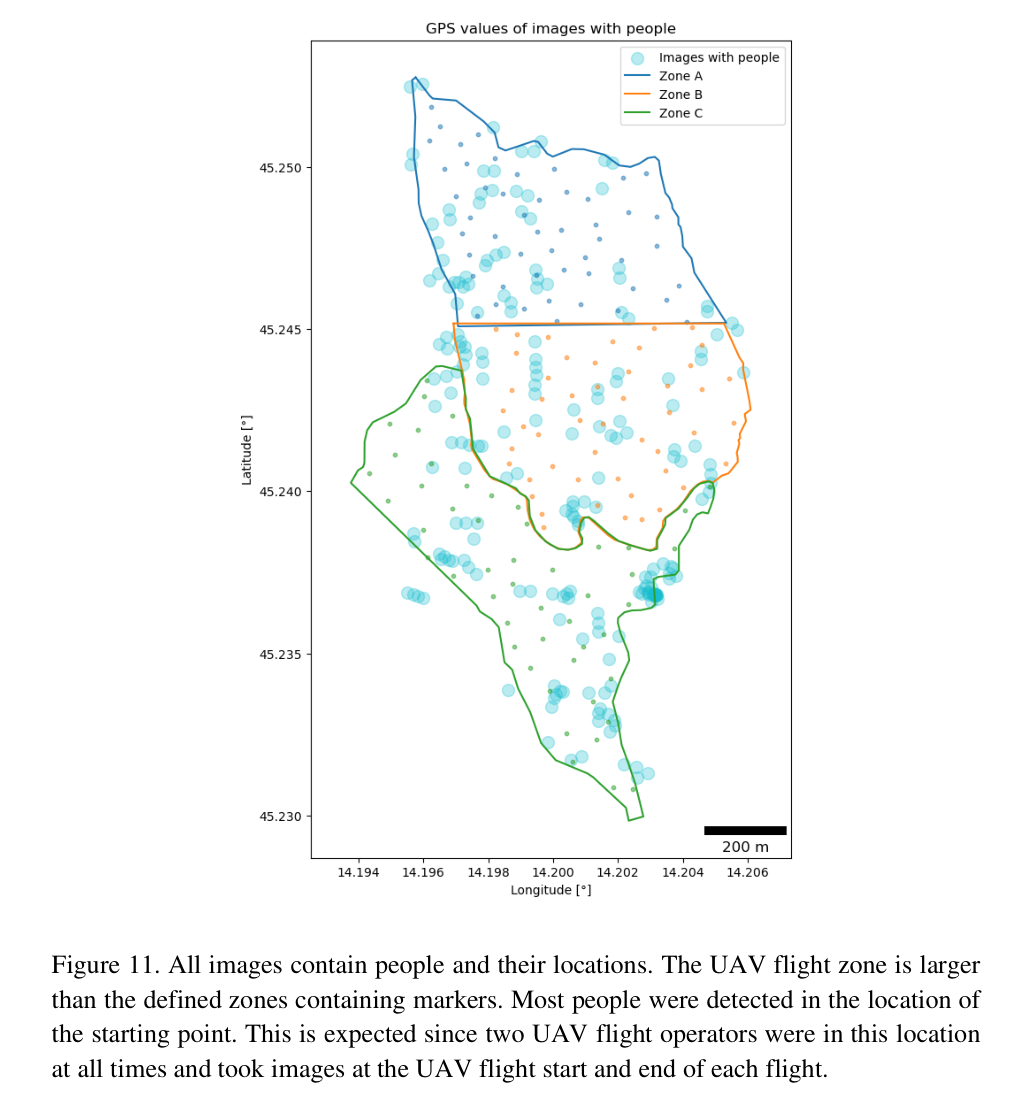
5)结果:实验结果表明,基于无人机的检测模型与现实世界的检测效果高度一致,验证了所提出的概率框架和无人机控制方法的有效性。通过合理分配任务给志愿者,确保了均匀的概率密度分布,从而提高了目标发现的概率。
https://qr.link/SDMye5 (二维码自动识别)




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











