






论文作者:Peng Zhang,Xin Li,Xin Lin,Liang He
作者单位:East China Normal University;Shanghai Jiao Tong University;
论文链接:http://arxiv.org/abs/2502.17822v1
内容简介:
1)方向:3D多目标跟踪
2)应用:3D多目标跟踪
3)背景:近年来,3D多目标跟踪(3D MOT)的研究多依赖于跟踪-by-检测的管道。然而,这些方法常忽视在3D检测过程中的潜在增强,导致在复杂场景下出现高误检率(FP)、漏检率(FN)和身份切换(IDS)。此外,数据预处理、关联机制、运动建模和生命周期管理的局限性,限制了整体跟踪的鲁棒性。
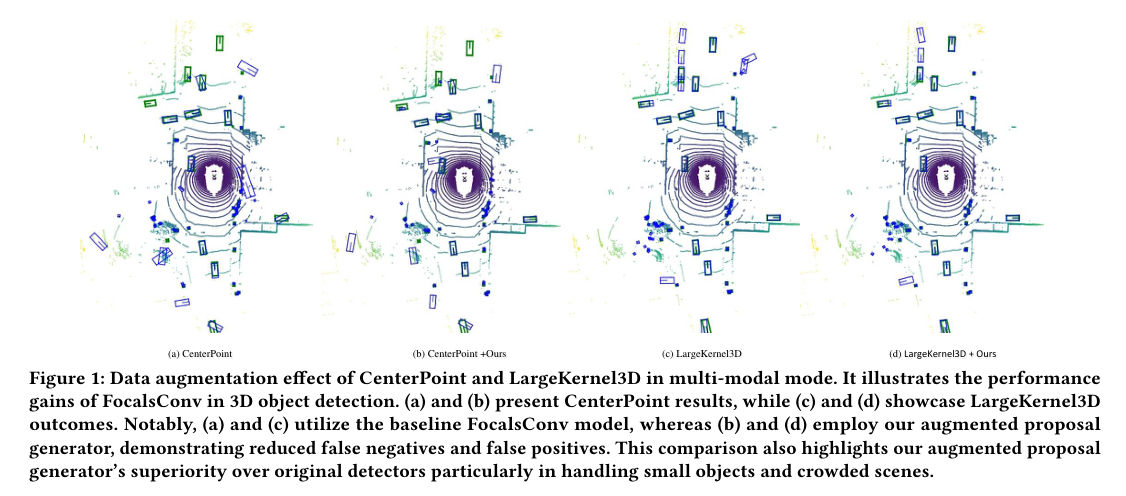
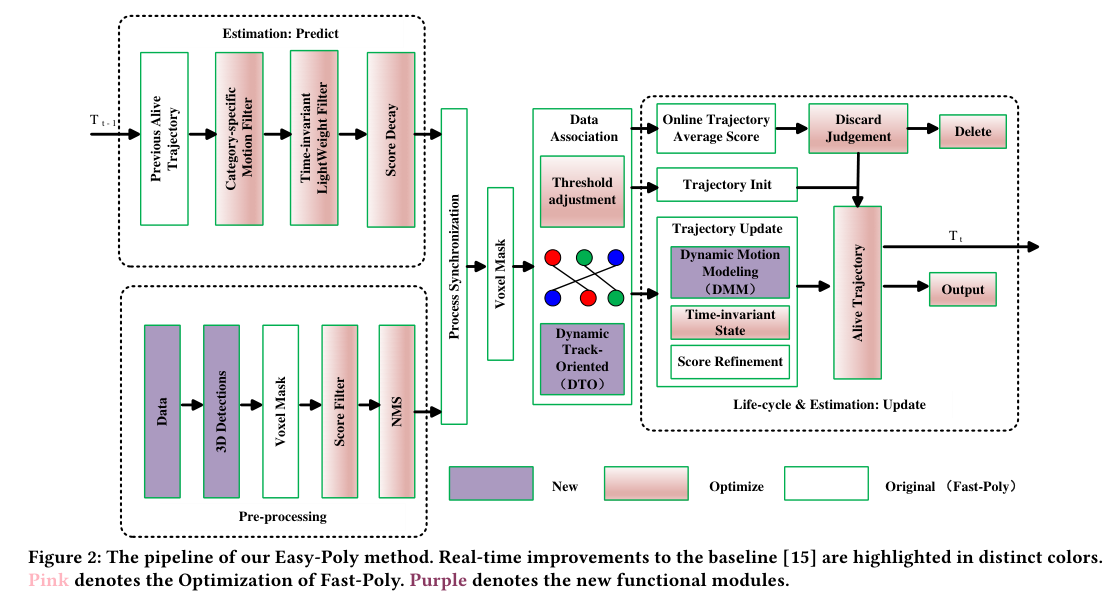
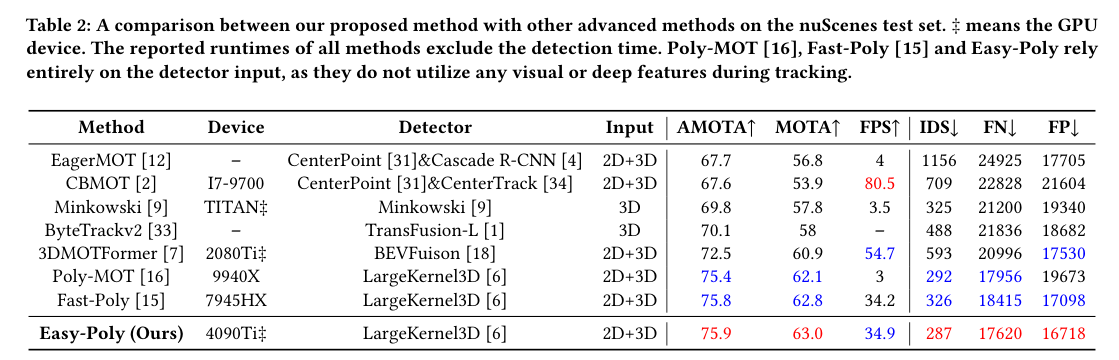
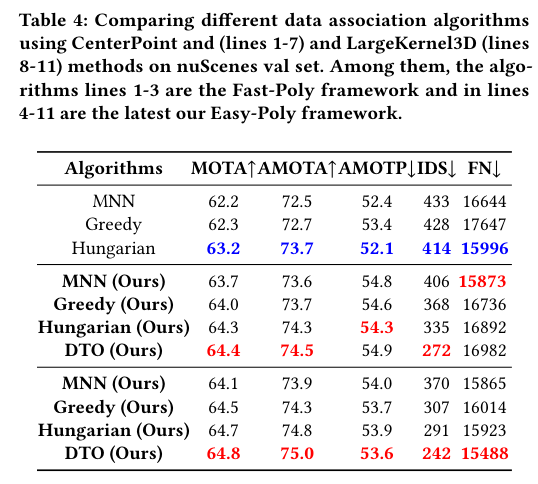
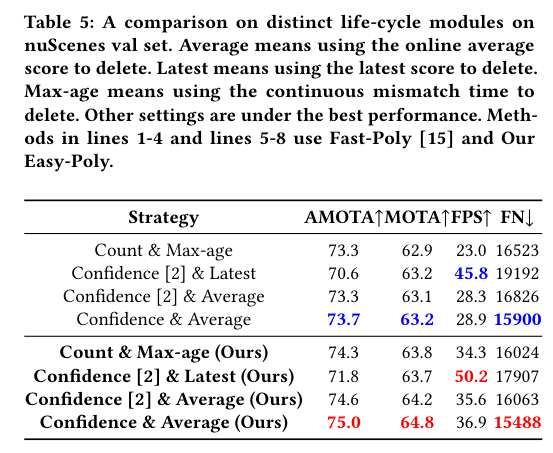
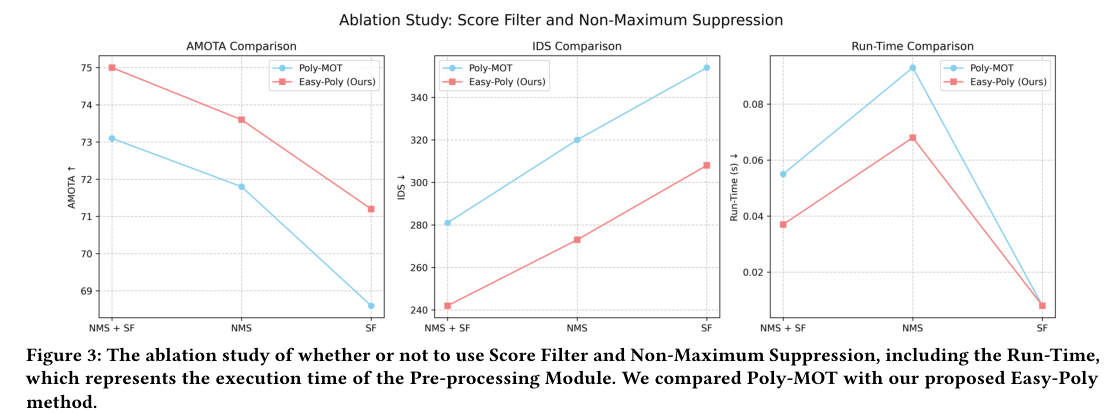
4)方法:为了解决这些问题,提出了一种名为Easy-Poly的实时滤波器基础3D MOT框架,适用于多种目标类别。其创新贡献包括:(1)增强型提议生成器(Augmented Proposal Generator),利用多模态数据增强和精细化的SpConv操作,显著提升了nuScenes数据集上的mAP和NDS;(2)动态跟踪导向(DTO)数据关联算法,通过最优分配和多假设处理,有效管理不确定性和遮挡;(3)动态运动建模(DMM),结合信心加权的卡尔曼滤波器和自适应噪声协方差,在复杂条件下提高了MOTA和AMOTA;(4)扩展的生命周期管理系统,通过调整阈值减少身份切换和错误终止。
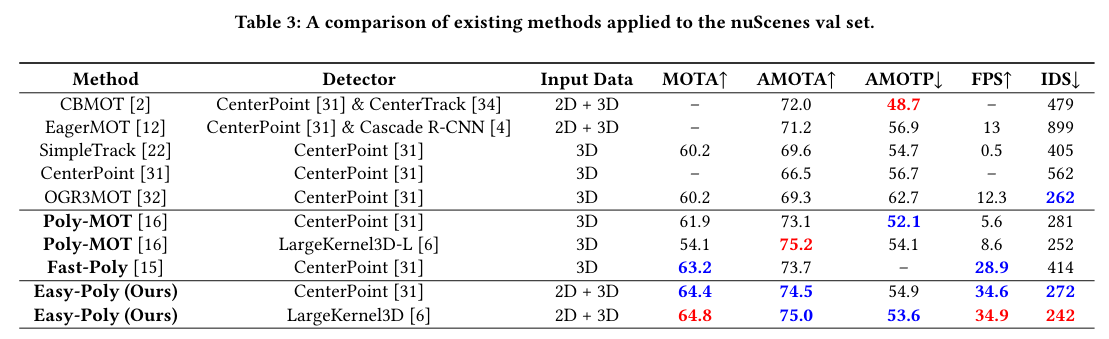
5)结果:实验结果表明,Easy-Poly在3D多目标跟踪任务中显著优于现有最先进的方法,如Poly-MOT和Fast-Poly,取得了mAP(例如,从63.30%提升到64.96%)和AMOTA(例如,从73.1%提升到74.5%)的显著提升,同时实现了实时运行。这些结果凸显了Easy-Poly在多种场景中的适应性和鲁棒性,使其成为自动驾驶等3D MOT应用的有力选择。





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











